Министерство образования и науки Российской Федерации
Уфимский Государственный Авиационный Технический Университет
Кафедра АТС
Курсовая работа
по дисциплине «Интегрированные системы проектирования и управления»
Синтез адаптивной системы управления процессом шлифования по силе резания.
Выполнил:
Группа: АТП-422
Проверил: Лютов А. Г.
Уфа-2005 Содержание
 Задание……………………………………………………………………..3
Задание……………………………………………………………………..3
Введение…… ……………………………………………………………...4
Анализ технологического процесса как объекта управления ……...5
Определение структуры основного контура системы…….……….…7
Определение математической модели ОУ и управляющего устройства основного контура…………………………………………………………….. 8
Обоснование необходимости адаптивного управления …………... 13
Выбор класса адаптивной системы управления… ………………… 14
Разработка структурной схемы АдСУ… …………………………... 15
Анализ системы по результатам компьютерного моделирования…..15
Заключение …….…………………………………………………………17
Список литературы…………………………………………………………18
Введение
Процесс шлифования занимает важнейшее место в ряду технологических процессов. Развитие производства ведет к ужесточению требований, предъявляемых к изготавливаемой продукции. Повышается точность, качество обрабатываемой поверхности и т.д., а вместе с тем растет и сложность систем управления станками. В таких условиях недостаточно применения на станках обычных систем стабилизации какой-либо величины. Требуется разработка систем, которые могли бы приспосабливаться к резко изменяющимся условиям окружающей среды и обеспечивали бы требуемые показатели качества выпускаемой продукции. Такими системами являются самонастраивающиеся системы (СНС) или адаптивные системы управления (АдСУ).
Целью данной курсовой работы является синтез адаптивной динамической системы управления процессом шлифования по силе резания, а также приобретение практических навыков анализа технологических процессов как ОУ, моделирования на ЭВМ синтезированной АдСУ и технической реализации элементов системы управления.
1. Анализ технологического процесса как объекта управления
Схема процесса
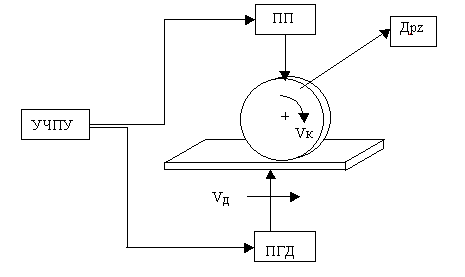
Vк-скорость круга,
VД-скорость движения детали,
ДPz-датчик силы,
ПГД – привод главного движения,
ПП – привод подачи.
Учпу – устройство числового программного управления
Регулирование силовыми координатами процесса резания обычно осуществляется изменением сечения среза (s*t). Наиболее чувствительны силы и мощность резания к изменению глубины резания t. Но этот параметр связан с припуском на обработку, и изменять его можно лишь при многопроходной обработке.
Таким образом, в основном управляющим воздействием для динамического звена «процесс резания» в САУ силовыми координатами является скорость, а выходной координатой –сила резания.
 Главная
составляющая силы резания определяется
по формуле:
Главная
составляющая силы резания определяется
по формуле:
![]()
![]() (1)
(1)
Где CPz – коэффициент, характеризующий материал шлифуемой детали(CPz =22 для закаленной стали).
Приведенное выражение показывает, что процесс резания представляет собой сложное динамическое звено, как по управляющему воздействию, так
и по возмущающему воздействию.
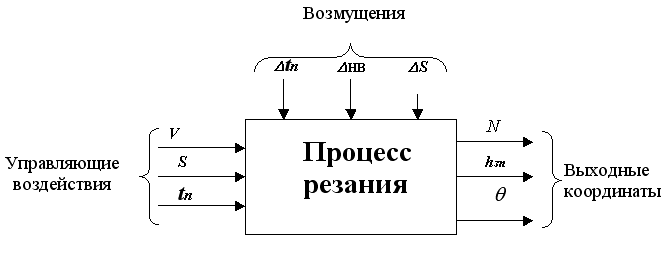
Входными координатами, позволяющими эффективно управлять процессом резания, являются:
-скорость подачи (Vs);
-глубина резания (tп).
 Контроль
обработки можно осуществлять по следующим
выходным координатам:
Контроль
обработки можно осуществлять по следующим
выходным координатам:
-главная составляющая силы резания (Pz) или мощность резания;
-термо-ЭДС (Е, характеризует температуру в зоне резания θ).
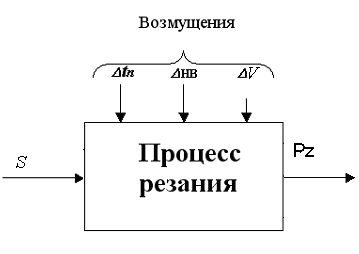
Негативное воздействие на токарную обработку оказывают возмущения:
-изменение припуска, следствием чего является изменение глубины резания(tп);
-изменение твердости обрабатываемого материала(HB);
-изменение подачи (S).
В общем случае ПР (процесс резания) в качестве объекта управления можно представить следующим образом:
Из уравнения (1) видно, что скорость резания эффективнее всего влияет на температуру в зоне резания. Поэтому за управляющую координату примем скорость резания – V.
Тогда для нашего случая объект управления имеет вид:
V ∆S