

Статические звенья
К статическим относятся такие звенья, которые при ступенчатом входном воздействии переходят из начального положения равновесия в новое равновесное состояние.
Статические звенья делятся на:
1) Пропорциональные;
2) Апериодические первого порядка;
3) Апериодические второго порядка;
4) Колебательные.
Пропорциональное звено
Это звено называют также усилительным и безынерционным. Звено описывается алгебраическим уравнением:
хвых = kхвх, [3.1]
где k - коэффициент передачи (усиления), имеющий размерность: единицы выходной величины, делённые на единицы входной величины (такую размерность имеют коэффициенты передачи всех статических звеньев).
Передаточная функция звена W(p) = k . [3.2]
Переходная функция h(t) = k1(t). [3.3]
Представляет собой ступенчатую функцию высотой k (рис. 3.1)
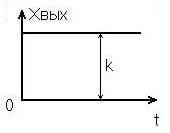
Рис. 3.1. Переходная функция пропорционального звена
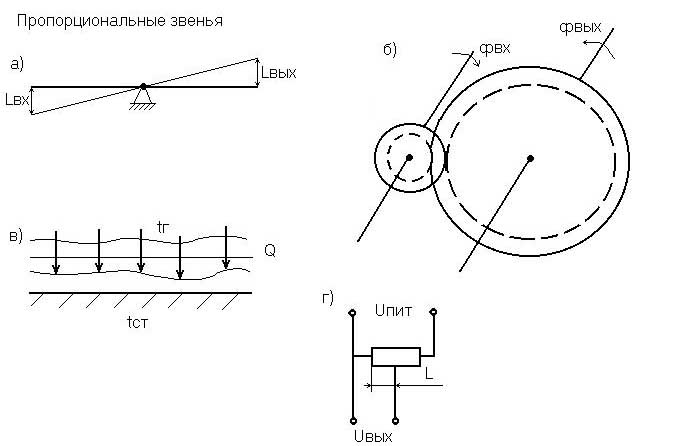
Рис. 3.2. Примеры пропорциональных звеньев
Примерами пропорционального звена могут служить: рычаг (рис. 3.2,а), если входная величина перемещение (усилие) на одном конце рычага, а выходная величина – перемещение (усилие) на втором конце; зубчатая передача (редуктор), если хвх = вх – угол поворота малой шестерни, а хвых = вых – то же для большой шестерни (рис. 3.2,б); теплоотдача конвекцией от движущегося газа к стенке, если хвх - разность температур газа и стенки t = tг – tст, а хвых - количество отдаваемого тепла Q (рис. 3.2,в); потенциометрический датчик измерительного прибора, если хвх - перемещение движка реохорда L, а хвых - снимаемое о датчика напряжение Uвых (рис. 3.2,г).
Обычно пропорциональное (безынерционное) звено является некоторой идеализацией реальных звеньев, и к нему сводятся позиционные звенья, рассмотренные ниже, если можно пренебречь переходными процессами в них. В этих условиях, например, большинство датчиков самых различных физических величин относятся к пропорциональному звену.
2. Апериодическое (инерционное) звено первого порядка
Описывается дифференциальным уравнением:
![]() ,
[3.4]
,
[3.4]
где k – коэффициент передачи;
Т – постоянная времени, с.
Передаточная функция звена W(p) = k/(Tp + 1); [3.5]
Переходная функция звена h() = k (1 – е-/T). [3.6]
Переходная функция представляет собой экспоненту (рис. 3.3). Отрезок, отсекаемый касательной, проведенной в начальной точке, при установившемся значении выходной величины равен постоянной времени Т.
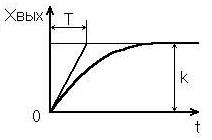
Рис. 3.3. Переходная функция апериодического звена 1-го порядка
Постоянная времени - это время, за которое выходная величина достигла бы своего установившегося значения, если бы с постоянной начальной скоростью. Чем больше Т, тем длительнее переходный процесс. Строго говоря, установившееся значение Хвых = k достигается при , но практически переходный процесс считается закончившимся через время 3Т.
Постоянная времени характеризует "инерционность" апериодического звена. Если она мала, то апериодическое звено по существу становится безынерционным.
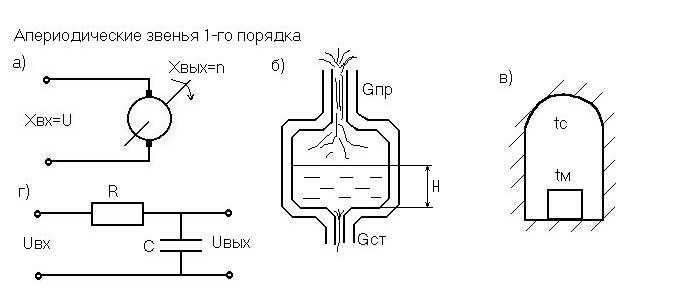
Рис. 3.4. Примеры апериодических звеньев 1-го порядка
Примерами апериодических звеньев могут служить: электропривод постоянного токи, если входная величина - подводимое напряжение хвх = u, а выходная величина хвых = n - скорость вращения (рис. 3.4,а); промежуточный ковш МНЛЗ, если хвх = Gпр - Gcт - разность поступления и расхода жидкого металла, а хвых = Н - уровень металла в ковше (рис. 3.4,6); нагрев тела, помещённого в среду с температурой tc (теплоотдача оценивается по закону Ньютона q = (tc – tм), где q - плотность теплового потока на нагреваемое тело; - коэффициент теплоотдачи), если tc.- входная величина, а средняя температура тела tм - выходная величина (рис. 3.4,в); цепочка RC (рис. 3.4,г), если хвх = uвх – подводимое напряжение, хвых = uвых – снимаемое напряжение.
3. Апериодическое (инерционное) звено второго порядка
Описывается уравнением:
![]() .
[3.7]
.
[3.7]
Для
этого звена корни характеристического
уравнения
![]() p2
+T1p
+1 = 0 должны
быть действительными, что выполняется
при условии: Т1
> 2Т2.
p2
+T1p
+1 = 0 должны
быть действительными, что выполняется
при условии: Т1
> 2Т2.
Передаточная функция звена W(p) = k/( p2 +T1p +1). [3.8]
Знаменатель передаточной функции может быть разложен на множители. и тогда передаточная функция будет иметь вид:
W(p) = k/[(T3p+1)( T4p+1)], [3.9]
где
![]() .
.
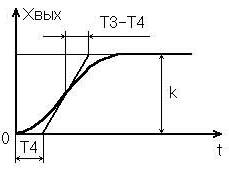
Рис. 3.5. Переходная функция апериодического звена 2-го порядка
Переходная функция (рис. 3.5) может быть получена по формуле Хевисайда
![]() .
[3.10]
.
[3.10]
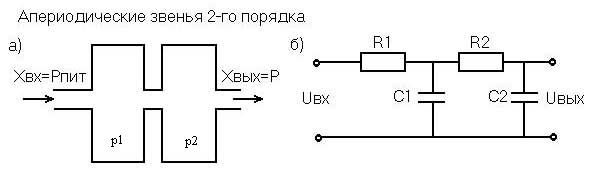
Рис. 3.6. Примеры апериодических звеньев 2-го порядка
Примеры апериодического звена второго порядка: последовательное соединение двух пневматических ёмкостей, если входная величина хвх = Рпит, а выходная величина - давление в емкости хвых = р (рис. 3.6,а); цепочка RC (рис. 3.6,б), если хвх = uвх – подводимое напряжение, хвых = uвых – снимаемое напряжение.
4. Колебательное звено.
Дифференциальное уравнение звена обычно представляется в виде:
![]() ,
[3.11]
,
[3.11]
где - коэффициент затухания, 0 < < 1.
Корни
характеристического уравнения
![]() равны
равны
![]() и
у колебательного звена должны быть
комплексными. Комплексные корни
получаются при
< 1.
и
у колебательного звена должны быть
комплексными. Комплексные корни
получаются при
< 1.
Передаточная
функция звена:
![]() .
[3.12]
.
[3.12]
Переходная функция звена:
![]() .
[3.13]
.
[3.13]
где
= /Т
, а
![]() носит затухающий колебательный характер
около значения хвых()
k.
Ее затухание определяется действительной
частью корней характеристического
уравнения ,
а частота - мнимой частью .
Существует характеристика переходного
процесса, называемая степенью
колебательности т
= /,
которая для колебательного звена
находится в интервалах 0 < т
< .
Колебательность переходного процесса
может также характеризоваться степенью
затухания:
носит затухающий колебательный характер
около значения хвых()
k.
Ее затухание определяется действительной
частью корней характеристического
уравнения ,
а частота - мнимой частью .
Существует характеристика переходного
процесса, называемая степенью
колебательности т
= /,
которая для колебательного звена
находится в интервалах 0 < т
< .
Колебательность переходного процесса
может также характеризоваться степенью
затухания:
![]() ,
[3.14]
,
[3.14]
где х1 и х3 - величины первой и третьей амплитуд выходных колебаний (рис. 3.7).
Рис. 3.7. Переходная функция колебательного звена
Значение степени затухания связано с действительной и мнимой частями корней характеристического уравнения колебательного звена
![]() ,
[3.15]
,
[3.15]
Рис. 3.8. Примеры колебательных звеньев
Примерами колебательных звеньев могут служить колебательный LRC -контур (рис. 3.8,а), если хвх = uвх – подводимое напряжение, хвых = uвых – снимаемое напряжение и упругая механическая передача (рис. 3.8,б). В передаче имеется упругий элемент У, маховик М и демпфер Д, оказывающий сопротивление вращению вала. Входная величина хвх - угол поворота входного вала 1, выходная величина хвых - угол поворота выходного вала 2.
АСТАТИЧЕСКИЕ (ИНТЕГРИРУЩИЕ) ЗВЕНЬЯ
Это такие звенья, у которых после поступления на вход ступенчатого воздействия выходная величина не приходит к установившемуся значению (как у статических), а непрерывно изменяется. Они делятся на 2 вида:
Идеальное
Реальное
1. Идеальное интегрирующее звено.
Дифференциальное уравнение звена:
![]() ,
[3.16]
,
[3.16]
где k1 – коэффициент передачи, имеющий размерность: единицы скорости изменения выходной величины, делённые на единицы входной величины.
Передаточная функция звена: W(p) = k1/p. [3.17]
Переходная функция звена: h() = k1, [3.18]
(рис. 3.9,а) представляет собой прямую линию с углом наклона агсtg k1.
Рис. 3.9. Переходная функция и примеры идеального интегрирующего звена
Примеры интегрирующих звеньев: электродвигатель, если входная величина - напряжение питания, а выходная величина - угол поворота якоря (рис. 3.9,б); кристаллизатор МНЛЗ, если входная величина - расход металла из промежуточного ковша (при постоянной скорости вытягивания слитка.), а выходная величина - уровень металла в кристаллизаторе; ванна жидкого металла в сталеплавильной печи, если входная величина - тепловой поток через поверхность ванны q, а выходная величина - изменение средней температуры металла tм (рис. 3.9,в)
2. Реальное интегрирующее звено (интегрирующее звено с замедлением).
Звено описывается дифференциальным уравнением:
![]() ,
[3.19]
,
[3.19]
Передаточная функция звена: W(p) = k1/p(Tp+1). [3.20]
Переходная
функция реального интегрирующего звена:
![]() .
[3.21]
.
[3.21]
отличается от переходной функции идеального эвена в начальный момент времени, а затем переходит в прямую линию с тем же углом наклона.
Примерами реальных интегрирующих звеньев могут служить те же звенья, что показаны на рис. 3.9, если более точно, без допущений рассматривать их уравнения движения. Например, электродвигатель с постоянной скоростью будет идеальным интегрирующим звеном. Однако в момент пуска постоянная скорость установится не сразу, а с некоторым замедлением, и электродвигатель следует рассматривать как реальное интегрирующее звено.
ДИФФЕРЕНЦИРУЮЩИЕ ЗВЕНЬЯ.
Делятся на 2 вида: идеальное и реальное.
Идеальное дифференцирующее звено.
Дифференциальное уравнение звена
![]() ,
[3.22]
,
[3.22]
где k2 – коэффициент передачи дифференцирующего звена, имеющий размерность: единицы выходной величины, делённые на единицы скорости изменения входной величины.
Передаточная функция звена W(р) = k2p. [3.23]
Переходная функция звена h() = k2(), [3.24]
где () - так называемая дельта-функция, которая равна нулю всюду, кроме нулевого момента времени, где её значение стремиться к бесконечности.
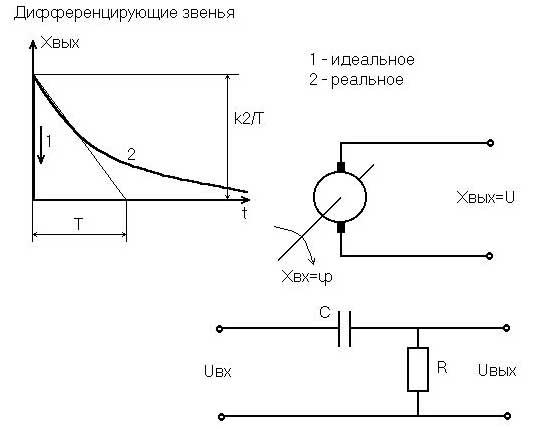
Рис. 3.10. Переходная функция и примеры дифференцирующих звеньев
Переходная функция идеального звена (рис. 3.10,а) представляет собой мгновенный бросок выходной величины в бесконечность в момент нанесения ступенчатого входного воздействия и столь же мгновенное возвращение к нулю.
Наиболее близко к идеальному звену приближается тахогенератор постоянного тока (рис. 3.10,б), если входной величиной считать угол поворота якоря, а выходной - ЭДС якоря, а также операционный усилитель в режиме дифференцирования, применяемый в аналоговых ЭВМ.
2. Реальное дифференцирующее звено (дифференцирующее звено с замедлением)
Звено описывается дифференциальным уравнением
![]()
Передаточная функция звена W(р) = k2p/(Tр + 1)
Переходная
функция звена
![]() представляет
собой экспоненту, касательная к которой
в точке наибольшей крутизны отсекает
на нулевом значении выходной величины
постоянную времени Т (рис. 3.10,а).
представляет
собой экспоненту, касательная к которой
в точке наибольшей крутизны отсекает
на нулевом значении выходной величины
постоянную времени Т (рис. 3.10,а).
Примером реального дифференцирующего звена может служить цепочка RC (рис. 3.10,в), если хвх = uвх – подводимое напряжение, хвых = uвых – снимаемое напряжение.