

31. Взаимодействие кса и рлс в режиме автоматического захвата и сопровождения трасс во.
Для 3х координатных РЛС: Для связи между РЛС и КСА необходимо управление, при помощи многожильного кабеля осуществляется управление излучением РЛС, управление НРЗ, установка режимов НРЗ. От РЛС по данным режимам приходит квитанции.
Тракт управления НРЗ: СВ-> УСП-> ПДУ 1(2) ->РЛС
Автозахват ВО:
Для захвата ВО в определенной области пространства свободной от помех, оператор с помощью трекбола и ПВ задает зону автозахвата путем ввода 2х координат (начала и конца зоны).
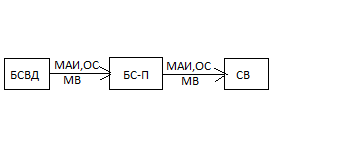
При каждом вводе на РМ формируется КТ и передается в СВ, который рассчитывает границы разрешенных ЗАЗ(зоны автозахвата). СВ формирует кодограмму УЗ(19) в которой указывает вид зоны, ее координаты и размеры зоны. Кодограмма УЗ передается в УПО РЛС по тракту:
СВ->УОИ->РЛС.
При появлении ВО в зоне обнаружения РЛС с приемника РЛС поступают на РМ КСА для отображения. РЛС->УСС->РМ
Первый обзор:
Если попадает в зону автозахвата УПО РЛС обнаруживает ВО и его координаты передает в СВ.
Координаты записваются в зону ОЗУ с признаком первого ввода -> пердача на РМ для отображения КТ -> формируется кодограмма Т-РМ для отображения точки и формуляра.
Второй обзор:
УПО РЛС обнаруживает э-пометку в стробе измеряя координаты ВО и в кодограмме передают в СВ, одновременно сигнал отображается на РМ.
После 2х вводов строб берется на АС(автосопровождение)
Третий обзор:
Данные результаты обзора записываются в кодограмму обмена. После второго обзора на экране РМ отображаются: Эхо, ОП, КТ, ЭТ и СВ принимает решение о захвате ВО на сопровождение.
АС ВО:
При пропусках отметок в процессе сопровождения расчет новых ЭТ.
При выходе ВО из зоны АЗ ВО будет продолжать сопровождаться.
В 2х координатных РЛС нет УПО и первичная информация поступает по тракту: РЛС->УСС->УПО
34.Работа кса при измерении угла места во.
Кодирование происходит для своего высотомера. Информация выдается датчиком качания.
36. Принцип работы усс по структурной схеме






37. Управление работой усс
Управление РЛС(выбор) |1|2|3|4|
|Э| |
Отображение эхо-сигнала(воздушной обстановки) |
|П| |
Отображение пеленга |
|О| |
Отобразить сигнал опознавания |
|ЭА| |
Эхо амплитудное |
|ГЗ| |
Границы зон |
|Синхронизация РЛС| |
Переход во внешнюю синхронизацию |
|Синхронизация АОИ| |
Режим внутренней синхронизации |
|А1|A2|A3|A4| |
Разрешает работу по информации, получаемой с той/иной РЛС |
Вопрос 38. Тракты прохождения видеосигналов в брв
Блок БРВ предназначен для усиления, коммутации и распределения информационных сигналов (видеосигналов), поступающих от сопрягаемых радиолокационных средств и устройства имитации (УИ), между потребителями, в качестве которых выступают УПО, РМ и внешние системы.
От каждого из четырех радиолокационных дальномеров (РД1 и РД4) на БРВ поступают эхо-сигналы (Э), сигналы опознавания (О) или клапанированного опознавания (ОК) и сигналы пеленга (П) на постановщик активных помех (от некоторых РЛС могут поступать импульсы "начала пеленга" и "конец пеленга" - НП и КП. От высотомеров поступают эхо-сигналы с выходов амплитудного (Э-В) и когерентного (ЭК-В) каналов, а также сигналы пеленгов (П-В).
От устройства имитации по двум каналам поступают соответствующие имитационные видеосигналы (ЭИ, ОИ, ПИ, ЭИ-В).
Под действием команд ВКЛ А1 - ВКЛ А4, поступающих с ПКУ-П, и команд ВКЛ К1 - ВКЛ К4, ВКЛ Э, ВКЛ ЭА, поступающих с рабочих мест РМ1-РМ5 (от РМ5 поступают соответствующие команды для подключения сигналов высотомеров),происходит распределение видеосигналов между УПО, РМ и внешними системами.
Особенность распределения эхо-сигналов, поступающих от высотомеров, состоит в том, что они подаются только на рабочие места РМ5. Тракты прохождения сигналов Э-В1, ЭК-В1, Э-В2, ЭК-2 аналогичны трактам прохождения сигналов Э.
