

Тема 7. Датчики кинематических параметров дса
( 2 часа, СРС – 1,5 часа)
Каждый ДСА имеет 12 кинематических параметров. Эти параметры можно разделить на 4 группы:
1)
– продольная дальность;
![]() – поперечная дальность;
– поперечная дальность;
– глубина (высота) движения;
2) угловые координаты:
– угол дифферента;
- угол курса;
– угол крена.
При
![]() углы
и
теряют смысл. Произвольное угловое
положение аппарата в пространстве может
быть определено девятью косинусами
углов между осями связанной с аппаратом
системы координат
и осями системы координат
,
оси которой параллельны стартовой
системе
.
Эти девять косинусов называются
направляющими косинусами. Количество
направляющих косинусов для однозначного
описания произвольного углового
положения аппарата избыточно. Из
теоретической механики известно, что
минимальное значение числа параметров
полностью определяющих угловое положением
ДСА в пространстве равно четырем. В
качестве примера можно привести параметры
Родрига-Гамильтона.
На практике чаще
используют 3 параметра -
,
,
,
доопределив их при
четвертым параметром.
углы
и
теряют смысл. Произвольное угловое
положение аппарата в пространстве может
быть определено девятью косинусами
углов между осями связанной с аппаратом
системы координат
и осями системы координат
,
оси которой параллельны стартовой
системе
.
Эти девять косинусов называются
направляющими косинусами. Количество
направляющих косинусов для однозначного
описания произвольного углового
положения аппарата избыточно. Из
теоретической механики известно, что
минимальное значение числа параметров
полностью определяющих угловое положением
ДСА в пространстве равно четырем. В
качестве примера можно привести параметры
Родрига-Гамильтона.
На практике чаще
используют 3 параметра -
,
,
,
доопределив их при
четвертым параметром.
3) Третья группа параметров:
![]() ,
,
![]() ,
,
![]() – угловые скорости движения ДСА вокруг
связанных осей.
– угловые скорости движения ДСА вокруг
связанных осей.
4) Четвертая группа
параметров:
-
скорость полюса аппарата,
- угол атаки аппарата,
- угол дрейфа или скольжения.
Вместо
этих параметров могут применяться
проекции скорости аппарата на связанные
оси
![]() ,
,
![]() ,
,
![]() .
.
Для получения значений параметров каждой из перечисленных групп существуют свои датчики или измерительные системы. Измерительные системы для получения значений параметров первой группы , , будут рассмотрены в следующем разделе. Наиболее просто из этих параметров измеряется высота или глубина ДСА. В этом разделе рассмотрим измерение глубины и высоты ДСА. Глубина ДСА измеряется либо путем измерения давления водяного столба, либо гидроакустическим методом путем измерения времени распространения гидроакустического сигнала от аппарата до поверхности воды и обратно. Более распространен метод измерения глубины путем измерения давления водяного столба. 10 метров глубины соответствует давлению 1 атм. Для измерения используются датчики давления. Находят применение датчики давления мембранного типа, датчики давления с витой мембраной и тензометрические датчики давления. На рис.7.1 приведена схема датчика давления мембранного типа. Рассмотрим принцип его действия.
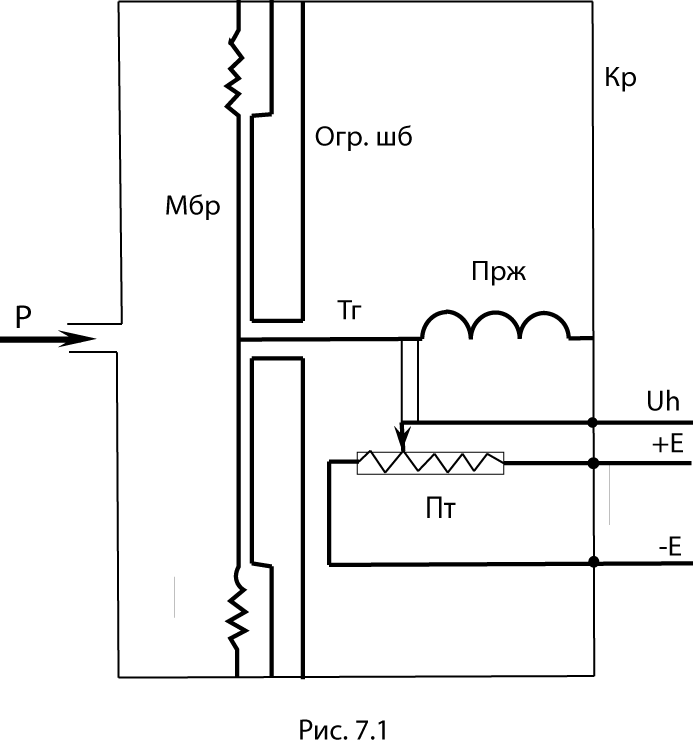 Корпус датчика
Кр
разделен мембраной Мбр
на две полости. Левая полость корпуса
соединена с забортным давлением воды.
Правая часть герметична и заполнена
нейтральным газом под давлением одна
атмосфера. В правой полости размещается
измерительная часть датчика. При
погружении аппарата увеличивается
давление Р
и мембрана перемещается вправо. Мембрана
соединена тягой Тг
с тарированной пружиной Прж.
Тяга перемещается прямо пропорционально
давлению Р.
Внутри правой полости размещен линейный
переменный резистор Пт.
Ползунок переменного резистора Пт
соединен с тягой Тг.
На намотку переменного резистора
подается напряжение +/-
Е. Напряжение
Uh,
снимаемое с ползунка, будет прямо
пропорционально измеряемому давлению
и следовательно глубине аппарата. В
правой полости также размещается
ограничительная шайба Огр.шб
предотвращающая разрушение датчика
при глубинах Р
значительно больших чем диапазон
измерения датчика. Точность мембранных
датчиков составляет
1% от максимальной глубины измерения.
Максимальная глубина измерения мембранных
датчиков достигает 250 метров.
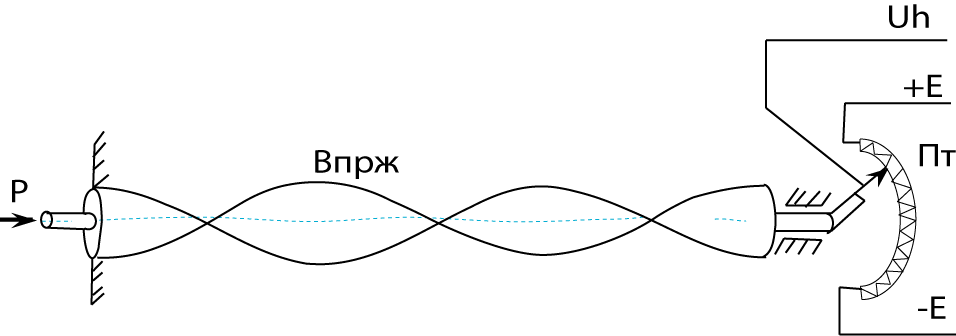
Второй тип датчиков давления, используемых
для измерения глубины ДСА, это датчики
давления с витой мембраной. Устройство
измерительной
части такого датчика
(не показан корпус датчика) приведена
на следующем рисунке.
Корпус датчика
Кр
разделен мембраной Мбр
на две полости. Левая полость корпуса
соединена с забортным давлением воды.
Правая часть герметична и заполнена
нейтральным газом под давлением одна
атмосфера. В правой полости размещается
измерительная часть датчика. При
погружении аппарата увеличивается
давление Р
и мембрана перемещается вправо. Мембрана
соединена тягой Тг
с тарированной пружиной Прж.
Тяга перемещается прямо пропорционально
давлению Р.
Внутри правой полости размещен линейный
переменный резистор Пт.
Ползунок переменного резистора Пт
соединен с тягой Тг.
На намотку переменного резистора
подается напряжение +/-
Е. Напряжение
Uh,
снимаемое с ползунка, будет прямо
пропорционально измеряемому давлению
и следовательно глубине аппарата. В
правой полости также размещается
ограничительная шайба Огр.шб
предотвращающая разрушение датчика
при глубинах Р
значительно больших чем диапазон
измерения датчика. Точность мембранных
датчиков составляет
1% от максимальной глубины измерения.
Максимальная глубина измерения мембранных
датчиков достигает 250 метров.
Второй тип датчиков давления, используемых
для измерения глубины ДСА, это датчики
давления с витой мембраной. Устройство
измерительной
части такого датчика
(не показан корпус датчика) приведена
на следующем рисунке.
 Рис
Витая
пружина Впрж
представляет собой сплющенную до
овального сечения трубку, скрученную
вокруг продольной оси. Выполнена трубка
из упругой стали. Правый конец трубки
заварен и закреплен на корпусе датчика
в подшипнике. Левый конец трубки жестко
закреплен на корпусе датчика и имеет
доступ жидкости из внешней среды
(давление Р).
Правый конец трубки – ось подшипника
соединены с ползунком переменного
резистора Пт.
При увеличении забортного давления
(глубины) трубка начнет раскручиваться.
Угол поворота трубки будет пропорционален
забортному давлению (глубине) и
пропорциональным глубине будет напряжение
Uh
с ползунка переменного резистора.
Максимальная глубина измерения такими
датчиками лежит от 200м до 1.5км. Точность
датчиков с
витой мембранных
составляет 0.8% от максимальной глубины
измерения.
Третий тип датчиков
давления, применяемый для измерения
глубины, это тензометрические датчики.
В этом датчике давления механо-электрический
преобразователь (тензометрический
элемент) приклеен к плоской или выпуклой
упругой пружине. Точность тензометрических
датчиков давления достигает 0,1 – 0,2 % от
максимальной глубины измерения.
Максимальная глубина измерения такими
датчиками достигает 1.5км.
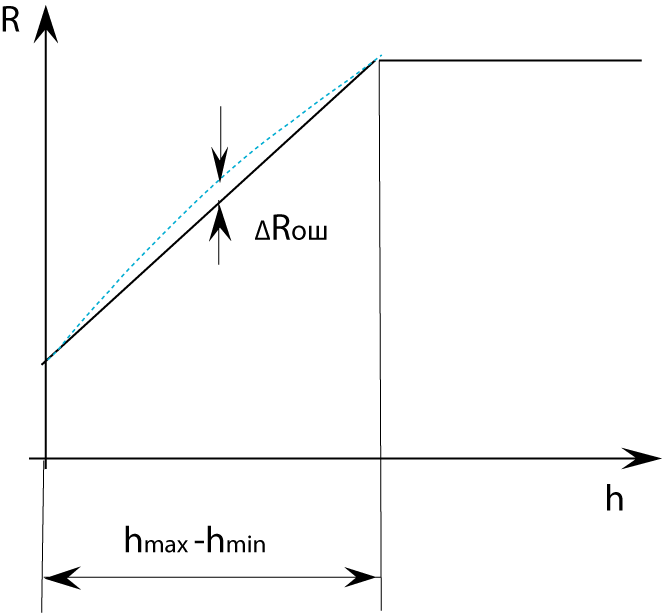
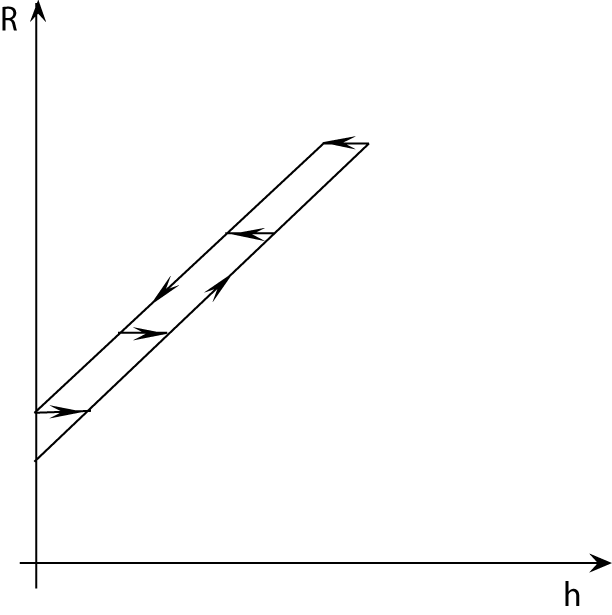
Погрешность
измерения давления датчиками складывается
из погрешности типа гладкой нелинейности
(см. рисунок), из погрешности типа
гистерезиса и нечувствительности (см.
следующий рисунок).
Рис
Витая
пружина Впрж
представляет собой сплющенную до
овального сечения трубку, скрученную
вокруг продольной оси. Выполнена трубка
из упругой стали. Правый конец трубки
заварен и закреплен на корпусе датчика
в подшипнике. Левый конец трубки жестко
закреплен на корпусе датчика и имеет
доступ жидкости из внешней среды
(давление Р).
Правый конец трубки – ось подшипника
соединены с ползунком переменного
резистора Пт.
При увеличении забортного давления
(глубины) трубка начнет раскручиваться.
Угол поворота трубки будет пропорционален
забортному давлению (глубине) и
пропорциональным глубине будет напряжение
Uh
с ползунка переменного резистора.
Максимальная глубина измерения такими
датчиками лежит от 200м до 1.5км. Точность
датчиков с
витой мембранных
составляет 0.8% от максимальной глубины
измерения.
Третий тип датчиков
давления, применяемый для измерения
глубины, это тензометрические датчики.
В этом датчике давления механо-электрический
преобразователь (тензометрический
элемент) приклеен к плоской или выпуклой
упругой пружине. Точность тензометрических
датчиков давления достигает 0,1 – 0,2 % от
максимальной глубины измерения.
Максимальная глубина измерения такими
датчиками достигает 1.5км.
Погрешность
измерения давления датчиками складывается
из погрешности типа гладкой нелинейности
(см. рисунок), из погрешности типа
гистерезиса и нечувствительности (см.
следующий рисунок).
 Рис
Третья
погрешность это нестабильность параметров
датчика во времени.
На входе датчиков
давления иногда ставят фильтр из мелкой
сетки для сглаживания пульсаций давления
в показаниях датчика. Иногда устанавливают
разделитель сред, чтобы морская вода
не попадала в датчик давления.
Рис
Третья
погрешность это нестабильность параметров
датчика во времени.
На входе датчиков
давления иногда ставят фильтр из мелкой
сетки для сглаживания пульсаций давления
в показаниях датчика. Иногда устанавливают
разделитель сред, чтобы морская вода
не попадала в датчик давления.
 Рис
Измерение
высоты полета крылатой ракеты.
Основным
измерительным прибором является радио
высотомер. Принцип работы любого
радиовысотомера состоит в измерении
разности времени распространения
электромагнитной волны от источника
электромагнитных колебаний до приемника
по двум путям - внутри ракеты и вне
ракеты (до морской поверхности и обратно).
Зная скорость распространения
электромагнитных волн и геометрию
распространения легко рассчитать высоту
полета.
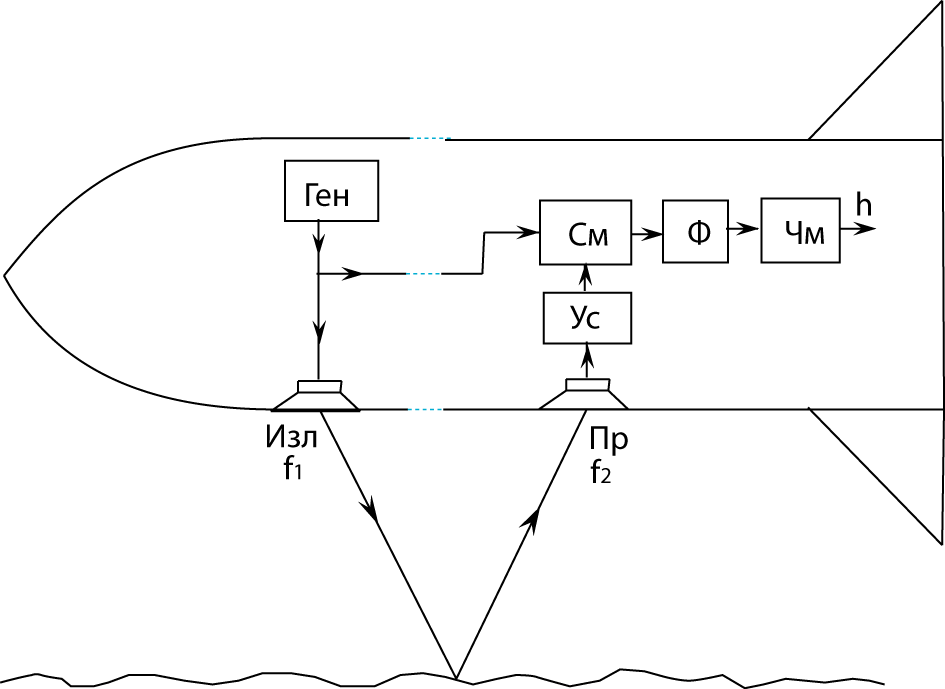
Рассмотрим структуру
радиовысотомера с линейной частотной
модуляцией. На борту ракеты находится
генератор высокочастотных колебаний
ГЕН.
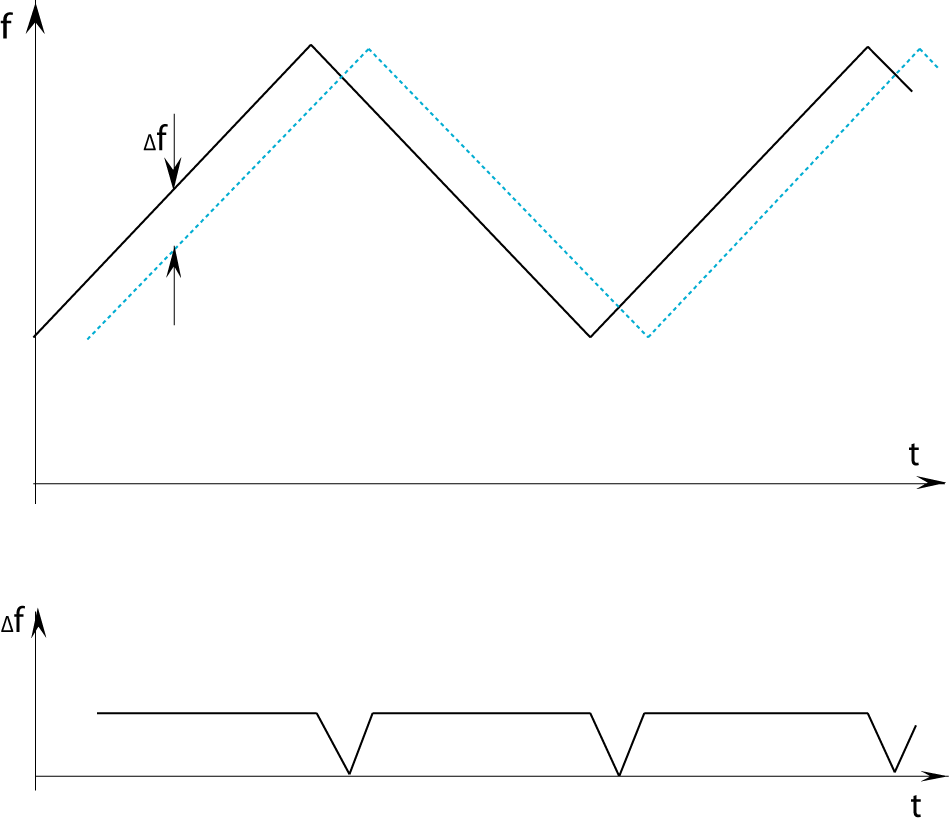
(см. рис.) Частота колебаний генератора
меняется по линейному закону (см.
следующий рисунок). От генератора
высокочастотное напряжение подается
на излучающую антенну Изл,
расположенную в нижней части носового
отсека, и на смеситель См,
расположенный в хвостовом отсеке ракеты.
В нижней части хвостового отсека
размещена приемная антенна Пр.
Передающая антенна излучает электромагнитные
волны во внешнюю среду в сторону
Рис
Измерение
высоты полета крылатой ракеты.
Основным
измерительным прибором является радио
высотомер. Принцип работы любого
радиовысотомера состоит в измерении
разности времени распространения
электромагнитной волны от источника
электромагнитных колебаний до приемника
по двум путям - внутри ракеты и вне
ракеты (до морской поверхности и обратно).
Зная скорость распространения
электромагнитных волн и геометрию
распространения легко рассчитать высоту
полета.
Рассмотрим структуру
радиовысотомера с линейной частотной
модуляцией. На борту ракеты находится
генератор высокочастотных колебаний
ГЕН.
(см. рис.) Частота колебаний генератора
меняется по линейному закону (см.
следующий рисунок). От генератора
высокочастотное напряжение подается
на излучающую антенну Изл,
расположенную в нижней части носового
отсека, и на смеситель См,
расположенный в хвостовом отсеке ракеты.
В нижней части хвостового отсека
размещена приемная антенна Пр.
Передающая антенна излучает электромагнитные
волны во внешнюю среду в сторону
 Рис
моря.
Приемная антенна принимает электромагнитные
волны со стороны моря и преобразует их
в высокочастотный электрический сигнал.
От приемной антенны высокочастотный
сигнал усиливается усилителем Ус
и поступает на второй вход смесителя
См.
Смеситель выполняет операцию типа
перемножения двух входных сигналов –
непосредственно от генератора Ген
и от приемной антенны Пр.
На выходе смесителя получаются
электрические сигналы суммарной частоты
и разностной частоты входных сигналов.
Принятый сигнал имеет частоту, показанную
пунктиром на рис. за счет того, что
приходит позже, чем сигнал от генератора,
проходящий внутри ракеты до смесителя.
В каждый момент времени разность частот
Рис
моря.
Приемная антенна принимает электромагнитные
волны со стороны моря и преобразует их
в высокочастотный электрический сигнал.
От приемной антенны высокочастотный
сигнал усиливается усилителем Ус
и поступает на второй вход смесителя
См.
Смеситель выполняет операцию типа
перемножения двух входных сигналов –
непосредственно от генератора Ген
и от приемной антенны Пр.
На выходе смесителя получаются
электрические сигналы суммарной частоты
и разностной частоты входных сигналов.
Принятый сигнал имеет частоту, показанную
пунктиром на рис. за счет того, что
приходит позже, чем сигнал от генератора,
проходящий внутри ракеты до смесителя.
В каждый момент времени разность частот
![]() остается постоянной за исключением
моментов времени, в который происходит
изменение роста частоты на уменьшение
и наоборот (см. нижний рисунок). От
смесителя
сигнал
поступает на фильтр Ф, где выделяется
электрический сигнал разностной частоты
.
Таким образом за счет частотной модуляции
задержка по
остается постоянной за исключением
моментов времени, в который происходит
изменение роста частоты на уменьшение
и наоборот (см. нижний рисунок). От
смесителя
сигнал
поступает на фильтр Ф, где выделяется
электрический сигнал разностной частоты
.
Таким образом за счет частотной модуляции
задержка по
 Рис
времени
Рис
времени
![]() принятого сигнала преобразуется в
электрический сигнал разностной частоты
.
От фильтра электрический сигнал
разностной частоты поступает на
частотомер Чм.
Разностная частота пропорциональна
высоте полета ракеты. Тогда выходной
сигнал частотомера с точностью до
постоянного коэффициента является
высотой полета ракеты.
принятого сигнала преобразуется в
электрический сигнал разностной частоты
.
От фильтра электрический сигнал
разностной частоты поступает на
частотомер Чм.
Разностная частота пропорциональна
высоте полета ракеты. Тогда выходной
сигнал частотомера с точностью до
постоянного коэффициента является
высотой полета ракеты.
Вторая группа датчиков – это измерители углов - курса, - дифферента (тангажа), - крена. В настоящее время текущие значения углов курса, дифферента и крена ДСА получают при помощи:
гироскопических датчиков углов; 2) гиростабилизаторов;
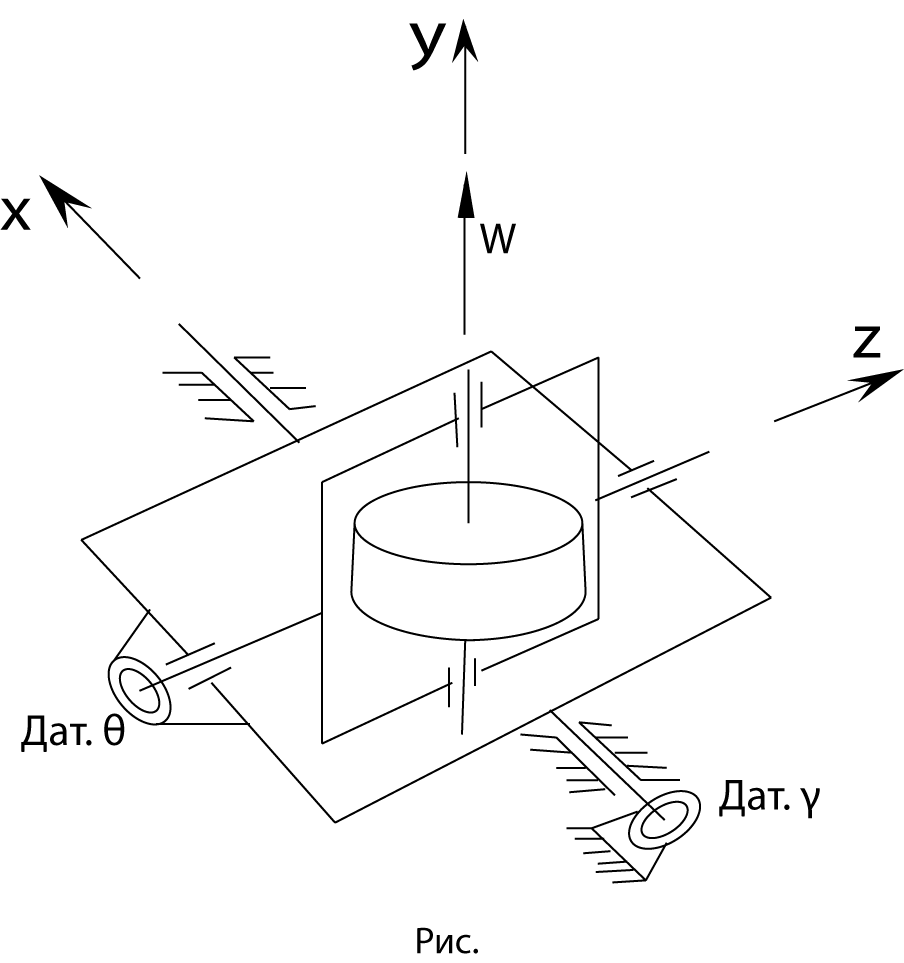
3) интегрирования дифференциальных уравнений, связывающих пер вые производные по времени углов курса, дифферента и крена с , , . Основой гироскопического датчика является свободный гироскоп, упрощенно представляющий собой устройство, изображенное на следующем рисунке. X, Y, Z – оси связанные с основанием, на котором установлен гироскоп, например ДСА.
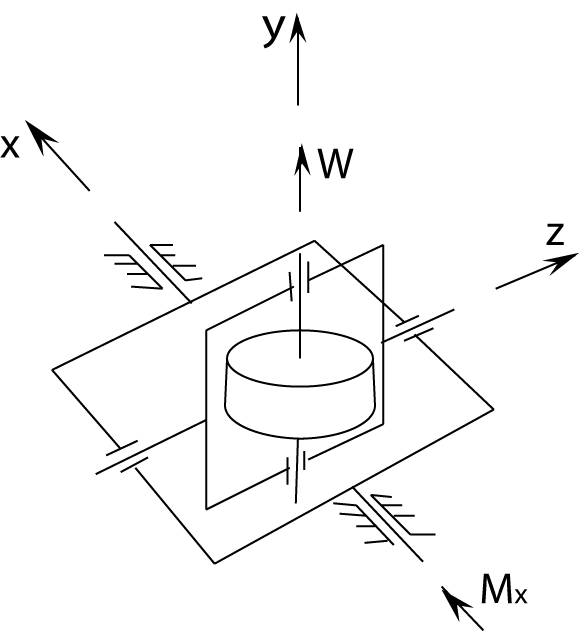 Существует осесимметричное тело
(ротор) в рассматриваемом случае с
вертикальной осью симметрии (ось
вращения). Ось вращения с помощь
подшипников закреплена в двух рамках
карданова подвеса, как показано на
рисунке. Ось вращения внешней рамки
карданова подвеса закреплена на корпусе
ДСА.
Данная механическая конструкция
становится свободным гироскопом, если
осесимметричное тело вращается с большой
угловой скоростью –тысячи или десятки
тысяч оборотов в минуту.
Для рассмотрения
свойств свободного гироскопа используют
величину, называемую кинитическим
моментом ротора
Существует осесимметричное тело
(ротор) в рассматриваемом случае с
вертикальной осью симметрии (ось
вращения). Ось вращения с помощь
подшипников закреплена в двух рамках
карданова подвеса, как показано на
рисунке. Ось вращения внешней рамки
карданова подвеса закреплена на корпусе
ДСА.
Данная механическая конструкция
становится свободным гироскопом, если
осесимметричное тело вращается с большой
угловой скоростью –тысячи или десятки
тысяч оборотов в минуту.
Для рассмотрения
свойств свободного гироскопа используют
величину, называемую кинитическим
моментом ротора
![]() ,
где .
,
где .
![]() - момент инерции ротора относительно
оси вращения,
- момент инерции ротора относительно
оси вращения,
![]() - угловая скорость вращения ротора
относительно оси вращения. Кинитический
момент - векторная величина. Основное
свойство свободного гироскопа будем
рассматривать в рамках прецессионной
теории гироскопа. (не будем рассматривать
высокочастотные колебания в гироскопе
-нутацию). Пусть трение в осях карданова
подвеса ничтожно мало.
Если к
внешней рамке приложить постоянный
момент вокруг оси Х
–
- угловая скорость вращения ротора
относительно оси вращения. Кинитический
момент - векторная величина. Основное
свойство свободного гироскопа будем
рассматривать в рамках прецессионной
теории гироскопа. (не будем рассматривать
высокочастотные колебания в гироскопе
-нутацию). Пусть трение в осях карданова
подвеса ничтожно мало.
Если к
внешней рамке приложить постоянный
момент вокруг оси Х
–
![]() ,
то внешняя рамка останется неподвижной,
а внутренняя рамка станет вращаться с
постоянной угловой скорость вокруг оси
Z
–
,
то внешняя рамка останется неподвижной,
а внутренняя рамка станет вращаться с
постоянной угловой скорость вокруг оси
Z
–
![]() .
Угловая скорость
называется прецессией. Величина угловой
скорости прецессии вокруг оси Z
равна
.
Угловая скорость
называется прецессией. Величина угловой
скорости прецессии вокруг оси Z
равна
![]() .
Вектор
направлен так, чтобы совместить вектор
.
Вектор
направлен так, чтобы совместить вектор
![]() и вектор
.
Если к внутренней рамке приложить
постоянный момент вокруг оси Z
–
и вектор
.
Если к внутренней рамке приложить
постоянный момент вокруг оси Z
–
![]() ,
то внутренняя рамка останется неподвижной,
а внешняя рамка станет вращаться с
постоянной угловой скорость вокруг оси
X
–
,
то внутренняя рамка останется неподвижной,
а внешняя рамка станет вращаться с
постоянной угловой скорость вокруг оси
X
–
![]() .
Угловая скорость
также называется прецессией. Величина
угловой скорости прецессии вокруг оси
X
равна
.
Угловая скорость
также называется прецессией. Величина
угловой скорости прецессии вокруг оси
X
равна
![]() .
Вектор
направлен так, чтобы совместить вектор
и вектор
.
Вектор
направлен так, чтобы совместить вектор
и вектор
![]() .
Из изложенного следует - если возмущающие
моменты равны нулю, то положение вектора
кинитического момента остается
неизменным.
Для сохранения неизменности
направления вектора кинитического
момента нужно уменьшать возмущающие
моменты и увеличивать значение
кинитического момента ротора. Особое
значение имеет то свойство гироскопа,
что возмущение рамки вокруг ее оси
вращения не приводит к изменению ее
положения.
.
Из изложенного следует - если возмущающие
моменты равны нулю, то положение вектора
кинитического момента остается
неизменным.
Для сохранения неизменности
направления вектора кинитического
момента нужно уменьшать возмущающие
моменты и увеличивать значение
кинитического момента ротора. Особое
значение имеет то свойство гироскопа,
что возмущение рамки вокруг ее оси
вращения не приводит к изменению ее
положения.
На основе свободного гироскопа выполняют приборы измеряющие углы курса, дифферента и крена. Рассмотрим гироскопический прибор, измеряющий угол курса. Для ДСА с горизонтальным стартом в начале функционирования системы прибор устанавливают так, чтобы вектор кинитического момента был направлен вдоль оси Х ДСА, как показано на рисунке. Круговой переменный резистор неподвижно устанавливается на корпусе прибора и естественно на корпусе ДСА. Ползунок потенциометра связан с осью вращения внешней рамки гироскопа. Этот потенциометр непосредственно преобразует механический угол поворота в эквивалентный электрический сигнал.
Потенциометр является датчиком угла.
Если трение в осях вращения рамок гироскопа мало и трение в точке контакта ползунка с намоткой потенциометра также мало, то вектор кинитического момента очень точно сохраняет первоначальное направление. При повороте аппарата вокруг оси Y ползунок потенциометра остается неподвижным в пространстве поскольку неподвижными остаются рамки гироскопа, а корпус потенциометра поворачивается совместно с аппаратом. С ползунка потенциометра при этом снимается электрический сигнал пропорциональный углу поворота аппарата . При наличии трения в точке контакта ползунка с намоткой потенциометра внутренняя рамка гироскопа будет поворачиваться относительно оси Z. В настоящее время в гироскопах измеряющих , , в качестве датчиков угла переменный резистор используется достаточно редко. В большинстве случаев используют бесконтактные датчики угла, работающие на переменном токе бортовой сети, это
1) вращающийся трансформатор,
2) индукционный датчик угла. ( можно рассказать о принципе действия таких датчиков угла)
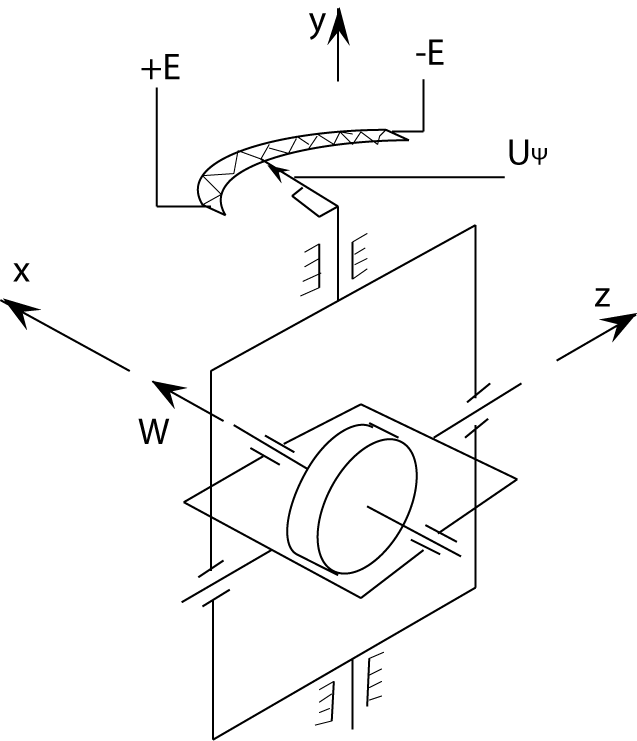
Рассмотрим
гироскопический прибор, измеряющий
одновременно углы дифферента и крена.
Упрощенный рисунок этого датчика для
![]() и
и
![]() приведен на нижеследующем рисунке.
Кинитический момент волчка гироскопа
располагают вертикально. Внешняя рамка
гироскопа располагается горизонтально.
Ось вращения внешней рамки направляют
вдоль связанной с аппаратом оси Х. На
оси вращения внешней рамки закреплена
внутренняя часть датчика угла крена
(обычно индукционный датчик). Внешняя
часть датчика угла крена закреплена на
корпусе прибора. Внутреннюю рамку
располагают вертикально , а ось ее
вращения совпадает с осью Z.
Ось вращения внутренней рамки в
подшипниках закрепляют на внешней
рамке. На оси вращения внутренней рамки
закреплена внутренняя часть датчика
угла дифферента (обычно вращающийся
трансформатор). Внешняя часть датчика
угла дифферента закреплена на внешней
рамке прибора. Таким образом датчик
угла крена измеряет угол между плоскость
внешней рамки и горизонтальной
плоскостью аппарата XAZ,
т.е. угол крена. Датчик угла дифферента
измеряет угол между плоскость внешней
рамки и плоскостью внутренней рамки,
т.е. угол дифферента.
приведен на нижеследующем рисунке.
Кинитический момент волчка гироскопа
располагают вертикально. Внешняя рамка
гироскопа располагается горизонтально.
Ось вращения внешней рамки направляют
вдоль связанной с аппаратом оси Х. На
оси вращения внешней рамки закреплена
внутренняя часть датчика угла крена
(обычно индукционный датчик). Внешняя
часть датчика угла крена закреплена на
корпусе прибора. Внутреннюю рамку
располагают вертикально , а ось ее
вращения совпадает с осью Z.
Ось вращения внутренней рамки в
подшипниках закрепляют на внешней
рамке. На оси вращения внутренней рамки
закреплена внутренняя часть датчика
угла дифферента (обычно вращающийся
трансформатор). Внешняя часть датчика
угла дифферента закреплена на внешней
рамке прибора. Таким образом датчик
угла крена измеряет угол между плоскость
внешней рамки и горизонтальной
плоскостью аппарата XAZ,
т.е. угол крена. Датчик угла дифферента
измеряет угол между плоскость внешней
рамки и плоскостью внутренней рамки,
т.е. угол дифферента.
 При
длительном функционировании ПА возможен
дрейф направления кинитического момента
W
, и, как следствие, рост погрешностей
измерения углов крена и дифферента. Для
повышения точности измерения в приборе
используют дополнительные устройства
(маятник и моментные датчики) для
коррекции направления вектора
кинитического момента. На приведенном
рисунке цепи коррекции не приведены.
Приведенный на рисунке прибор с цепями
коррекции называется гировертикалью.
Из двух рассмотренных приборов
наиболее точным является курсовой
прибор.
При
длительном функционировании ПА возможен
дрейф направления кинитического момента
W
, и, как следствие, рост погрешностей
измерения углов крена и дифферента. Для
повышения точности измерения в приборе
используют дополнительные устройства
(маятник и моментные датчики) для
коррекции направления вектора
кинитического момента. На приведенном
рисунке цепи коррекции не приведены.
Приведенный на рисунке прибор с цепями
коррекции называется гировертикалью.
Из двух рассмотренных приборов
наиболее точным является курсовой
прибор.
Датчики угловой скорости . Для измерения компонент угловой скорости вращения аппарата ( , , .) обычно используют двухстепенные гироскопы (гиротахометры, ДУСы). Что это такое? На следующем рисунке приведена упрощенная схема двухстепенного гироскопа, закрепленного на аппарате так, чтобы измерять угловую скорость .
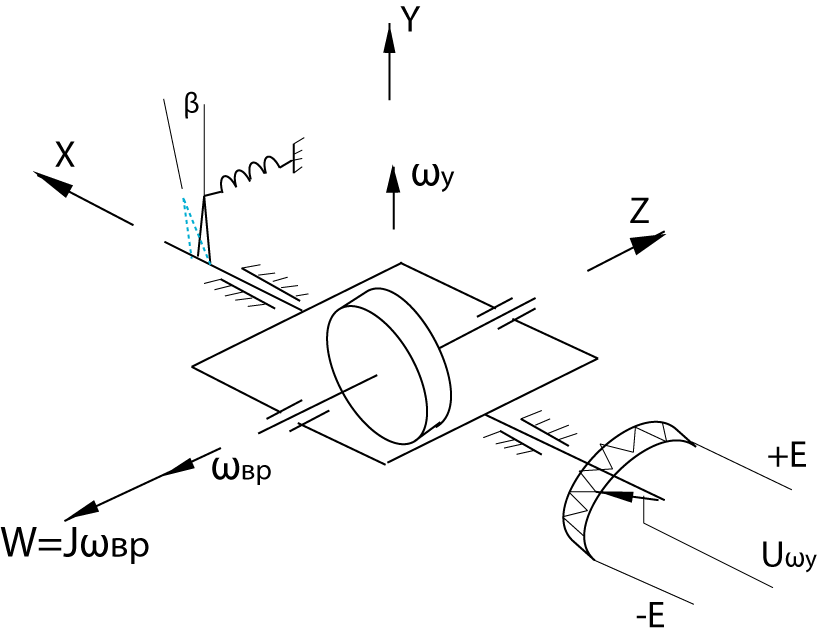 Гироскоп
имеет одну рамку, в которой помещен
волчок. Рамка расположена горизонтально.
Ось ее вращения направлена вдоль
связанной оси X.
Вектор кинитического момента волчка
также расположен горизонтально и
направлен вдоль связанной оси Z.
На оси вращения рамки размещена пружина,
одним концом закрепленная на корпусе
прибора, а другим через плечо рычага
подсоединенная к оси рамки. Пружина
может работать как на растяжение так и
сжатие. На оси вращения рамки размещен
также кольцевой переменный резистор.
Кольцо намотки переменного резистора
закреплено на корпусе, а ползунок
соединен с осью рамки. На намотку
резистора подается напряжение питания,
а с ползунка снимается напряжение,
пропорциональное угловой скорости
аппарата вокруг оси Y.
Гироскоп
имеет одну рамку, в которой помещен
волчок. Рамка расположена горизонтально.
Ось ее вращения направлена вдоль
связанной оси X.
Вектор кинитического момента волчка
также расположен горизонтально и
направлен вдоль связанной оси Z.
На оси вращения рамки размещена пружина,
одним концом закрепленная на корпусе
прибора, а другим через плечо рычага
подсоединенная к оси рамки. Пружина
может работать как на растяжение так и
сжатие. На оси вращения рамки размещен
также кольцевой переменный резистор.
Кольцо намотки переменного резистора
закреплено на корпусе, а ползунок
соединен с осью рамки. На намотку
резистора подается напряжение питания,
а с ползунка снимается напряжение,
пропорциональное угловой скорости
аппарата вокруг оси Y.
Как работает этот
прибор? Угловая скорость
вызывает гироскопический момент вокруг
оси X.
Рамка гироскопа начнет поворачивается
под действием этого момента до тех пор,
пока гироскопический момент
![]() не станет равным моменту от упругой
пружины. Угол, на который повернется
ось рамки, растянув (или сжав) пружину,
будет пропорционален
.
Технически пружина может быть механической
или электрической. Датчики угла поворота
оси рамки могут быть, как приведено в
примере, потенциометрическими или в
виде вращающегося трансформатора и
т.д. Датчики приведенной конструкции
имеют точность порядка 2% от максимального
диапазона измерения.
В настоящее
время существует много типов гироскопических
измерителей углов и угловых скоростей.
Например такие:
1) гироскопы
с воздушной опорой
– механическая опора в подшипниках
заменена газовой.
2) поплавковые
гироскопы
– подвижные элементы конструкции в
герметичном виде помещены в жидкость
с тяжелым удельным весом и силы давления
в опорах компенсируются архимедовыми
силами.
3) Динамически
настраиваемые гироскопы
(ДНГ). Это гироскопы с упругим подвесом
ротора. Применяется внутренний карданов
подвес с торсионным подвесом ротора.
Ротор – снаружи. Торсионный внутренний
карданов подвес внутри. Вращение внешнего
ротора производится от двигателя через
внутренний карданов подвес. Упругие
свойства торсионов компенсируются
надлежащим выбором моментов инерции
элементов кардана.
4) Кольцевые
лазерные гироскопы.
(дусы)
5)Волоконно
– оптические гироскопы
(дусы)
6) Твердотельные
волновые гироскопы
(дусы) - фужер.
7) Вибрационный
гироскоп
(дус) – ножка камертона с частотой
колебаний, а амплитуда пропорциональна
угловой скорости платформы.
8)
Микромеханические
(микро 7)
9)
Гироскопы с неконтактным подвесом
– реализуется состояние левитации
с электростатическим подвесом, и
электромагнитным подвесом.
Измерение
,
,
Для
измерения проекций скорости движения
ПА на его связанные оси применяют
гидроакустический метод. Используют
эффект Доплера реверберационных сигналов
в ближней зоне ПА.(см. ФМП)
Тема
8 Навигационные системы ДСА
не станет равным моменту от упругой
пружины. Угол, на который повернется
ось рамки, растянув (или сжав) пружину,
будет пропорционален
.
Технически пружина может быть механической
или электрической. Датчики угла поворота
оси рамки могут быть, как приведено в
примере, потенциометрическими или в
виде вращающегося трансформатора и
т.д. Датчики приведенной конструкции
имеют точность порядка 2% от максимального
диапазона измерения.
В настоящее
время существует много типов гироскопических
измерителей углов и угловых скоростей.
Например такие:
1) гироскопы
с воздушной опорой
– механическая опора в подшипниках
заменена газовой.
2) поплавковые
гироскопы
– подвижные элементы конструкции в
герметичном виде помещены в жидкость
с тяжелым удельным весом и силы давления
в опорах компенсируются архимедовыми
силами.
3) Динамически
настраиваемые гироскопы
(ДНГ). Это гироскопы с упругим подвесом
ротора. Применяется внутренний карданов
подвес с торсионным подвесом ротора.
Ротор – снаружи. Торсионный внутренний
карданов подвес внутри. Вращение внешнего
ротора производится от двигателя через
внутренний карданов подвес. Упругие
свойства торсионов компенсируются
надлежащим выбором моментов инерции
элементов кардана.
4) Кольцевые
лазерные гироскопы.
(дусы)
5)Волоконно
– оптические гироскопы
(дусы)
6) Твердотельные
волновые гироскопы
(дусы) - фужер.
7) Вибрационный
гироскоп
(дус) – ножка камертона с частотой
колебаний, а амплитуда пропорциональна
угловой скорости платформы.
8)
Микромеханические
(микро 7)
9)
Гироскопы с неконтактным подвесом
– реализуется состояние левитации
с электростатическим подвесом, и
электромагнитным подвесом.
Измерение
,
,
Для
измерения проекций скорости движения
ПА на его связанные оси применяют
гидроакустический метод. Используют
эффект Доплера реверберационных сигналов
в ближней зоне ПА.(см. ФМП)
Тема
8 Навигационные системы ДСА
(2 часа, СРС-1,5
часа)
Как измерить для ДСА в процессе
его движения координаты
,
![]() ,
,
![]() ?
Измерение
координаты
было рассмотрено в разделе датчиков.
Гораздо труднее получить информацию о
продольной -
и
поперечной -
дальностях.
?
Измерение
координаты
было рассмотрено в разделе датчиков.
Гораздо труднее получить информацию о
продольной -
и
поперечной -
дальностях.
Если ПА движется
по прямой, то пройденный путь
![]() ,
а V можно измерить, например, средствами
гидроакустики – доплеровским методом;
по скоростному напору, на торпедах –
от винтов.
,
а V можно измерить, например, средствами
гидроакустики – доплеровским методом;
по скоростному напору, на торпедах –
от винтов.
Но если ДСА движется не по прямой, как получить информацию о положении? Существует два принципиально разных подхода.
Информацию о , может быть получена извне посредством спутниковых навигационных систем. Их много, но наиболее точная и общедоступная – это система GPS. Под этим именем подразумеваются три навигационные системы: Navstar – разработки США, ГЛОНАСС – разработки СССР (Россия), Галилео – разработки Евросоюза. Навигационная система Navstar полностью развернута и функционирует более 10-ти лет(в ее составе более 24 спутников): Развертывание системы ГЛОНАСС завершается. Она функционирует на всей территории России. Развертывание системы Галилео только начинается. Навигационные системы GPS позволяют получить один раз в секунду : три геодезические координаты- широту, долготу и высоту, скорость движения и мировое время. Для получения этой информации в поле зрения приемника GPS должны находиться минимум 4 спутника. При наличии в поле зрения 3-х спутников можно получить только три геодезические координаты и время. Все спутники одной системы работают синхронно и один раз в секунду излучают электромагнитный сигнал. В сигнале содержится информация о факте излучения сигнала и служебная информация о принадлежности сигнала конкретному спутнику и другая информация. В точке приема по разности по времени приема сигналов и служебной информации от нескольких спутников можно определить геодезические координаты точки приема. Точность системы Navstar по координатам ~ 10м – в общедоступном варианте, ~ 3м – в оборонном варианте, ~ 1м – в дифференциальном режиме для определенных районов. Для системы ГЛОНАСС заявлена точность ~ 10м. О наличии оборонного варианта нет информации. Евросоюз обещает точность для системы Галилео ~1м.
Для того чтобы пользоваться услугами спутниковой навигационной системы необходимо иметь антенну и приемник. Приемное оборудование GPS ничего в пространство не излучает, а работает только на прием. Антенна в ширпотребном варианте имеет размер спичечного коробка половинной толщины, и примерно такие же размеры имеет электронная печатная плата приемника. В специальном варианте размеры антенны могут немного больше. Например для надводного корабля - в размер яблока. (10 лет назад размеры печатных плат для приемника были немного большего размера –привести пример).
Область применения систем GPS чрезвычайно велика и постоянно расширяется. (От прогулки по лесу до крылатых ракет и КАБов) Существенными недостатками системы GPS являются следующие. Невозможность работы в подводном положении. Невозможность работы вне планеты Земля.
2. Второй способ получения информации о точке нахождения аппарата это получение ее непосредственно на борту аппарата без использования внешних источников информации. Чтобы понять принцип как это сделать упростим задачу. Будем считать поверхность земли плоской. Принципиально это ничего не меняет кроме упрощения математических преобразований. Существуют такие приборы, которые измеряют линейное ускорение. Эти приборы называют акселерометрами. Разместим эти приборы на ДСА измерительными осями вдоль осей системы как показано на нижеследующем рисунке.
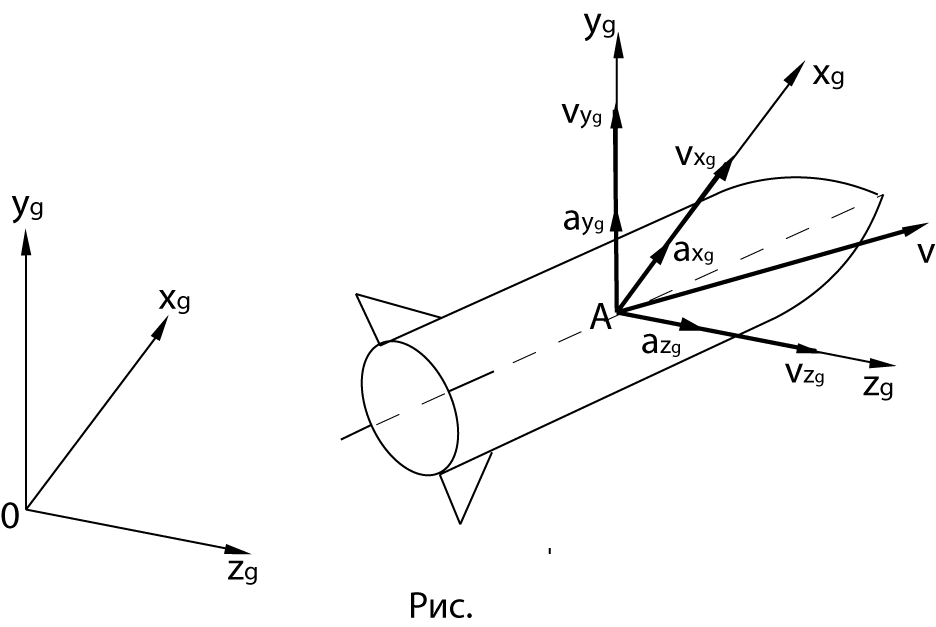 В
этом случае координаты
В
этом случае координаты
![]() можно вычислять в процессе движения
аппарата путем двойного интегрирования
ускорений
можно вычислять в процессе движения
аппарата путем двойного интегрирования
ускорений
![]() ,
,
![]() ,
,
![]() по
следующим формулам
по
следующим формулам
![]()
![]()
![]() .
Для
выполнения вычислений необходимо знать
начальные значения координат
.
Для
выполнения вычислений необходимо знать
начальные значения координат
![]() и начальных скоростей
и начальных скоростей
![]() и текущие значения ускорений вдоль осей
системы
.
и текущие значения ускорений вдоль осей
системы
.
Трудность реализации
расчета по приведенным формулам состоит
в том, что компоненты ускорения должны
измеряться вдоль осей неизменно
направленных в пространстве. Но ДСА
изменяет свое угловое положение в
полете. Чтобы получить фиксированное
направление осей
![]() ,
,
![]() ,
,
![]() внутри ДСА, существует такой прибор –
гиростабилизированная платформа (ГСП).
При любых угловых эволюциях ДСА в
пространстве ГСП сохраняет свое положение
относительно осей
внутри ДСА, существует такой прибор –
гиростабилизированная платформа (ГСП).
При любых угловых эволюциях ДСА в
пространстве ГСП сохраняет свое положение
относительно осей
![]() .
Тогда, разместив на ней акселерометры
так, чтобы они измеряли
,
,
,
можно вычислить
согласно
приведенным формулам. Следует отметить,
что ГСП – сложнейшее и дорогостоящее
электромеханическое устройство. Запуск
ГСП в работу требует существенного
времени, что подчас снижает тактические
возможности ДСА.
.
Тогда, разместив на ней акселерометры
так, чтобы они измеряли
,
,
,
можно вычислить
согласно
приведенным формулам. Следует отметить,
что ГСП – сложнейшее и дорогостоящее
электромеханическое устройство. Запуск
ГСП в работу требует существенного
времени, что подчас снижает тактические
возможности ДСА.
Можно обойтись без ГСП. Это так называемая БИНС – бесплатформенная инерциальная навигационная система. Для реализации на борту ДСА БИНС поступают следующим образом.
На борту
аппарата закрепляют жестко вдоль
связанных осей
,
![]() ,
,
![]() акселерометры,
измеряющие ускорения
акселерометры,
измеряющие ускорения
![]() ,
,
![]() ,
,
![]() .
Проектируют ускорения
,
,
.
Проектируют ускорения
,
,
![]() на
направление осей
,
,
и
получают значения ускорений вдоль осей
стартовой земной системы координат
,
,
.
Для
вычисления проекций ускорений
,
,
на
направление осей
,
,
и
получают значения ускорений вдоль осей
стартовой земной системы координат
,
,
.
Для
вычисления проекций ускорений
,
,
![]() на
направление осей
,
,
нужно иметь значения косинусов углов
между осями связанной системы координат
и осями стартовой земной системы
координат, т.е. иметь значения направляющих
косинусов связанной системы координат.
на
направление осей
,
,
нужно иметь значения косинусов углов
между осями связанной системы координат
и осями стартовой земной системы
координат, т.е. иметь значения направляющих
косинусов связанной системы координат.
Зная текущие
значения компонент ускорения аппарата
,
,
,
путем первого интегрирования непрерывно
получают значения скоростей аппарата
![]() .
Интегрируя скорости
непрерывно
получают координаты аппарата
.
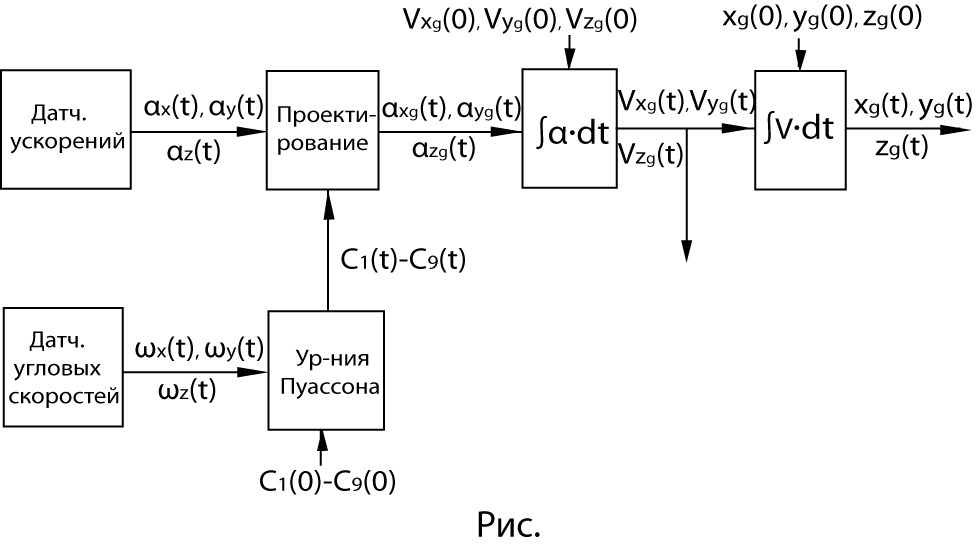
Текущие значения направляющих
косинусов движущегося аппарата вычисляют
следующим образом. Помимо трех
акселерометров на борту аппарата
устанавливают три датчика угловых
скоростей вращения аппарата, измеряющих
угловые скорости вращения аппарата
вокруг связанных осей.-
.
Интегрируя скорости
непрерывно
получают координаты аппарата
.
Текущие значения направляющих
косинусов движущегося аппарата вычисляют
следующим образом. Помимо трех
акселерометров на борту аппарата
устанавливают три датчика угловых
скоростей вращения аппарата, измеряющих
угловые скорости вращения аппарата
вокруг связанных осей.-
![]() ,
,
![]() ,
,
![]() .
Используя текущие значения
,
,
и решая в реальном масштабе времени
уравнения Пуассона, получают текущие
значения направляющих косинусов.
Уравнения Пуассона для направляющих
косинусов имеют следующий вид.
.
Используя текущие значения
,
,
и решая в реальном масштабе времени
уравнения Пуассона, получают текущие
значения направляющих косинусов.
Уравнения Пуассона для направляющих
косинусов имеют следующий вид.
![]()
![]()
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Структурная
схема алгоритма БИНС приведена на
следующем рисунке.
.
Структурная
схема алгоритма БИНС приведена на
следующем рисунке.
Не следует забывать, что приведенный алгоритм является упрощенным. При учете формы Земли и ее вращении алгоритм БИНС усложнится. БИНС является сложной и дорогостоящей системой. При ее реализации возникает ряд трудностей. К счастью существовавшая раньше трудность - наличие для реализации БИНС значительных вычислительных мощностей к настоящему времени преодолена. Основной трудностью является требование высокой точности датчиков угловых скоростей и акселерометров. Необходима высокая точность начальной ориентации и скорости аппарата.
Для БИНС характерно накопление ошибок в процессе ее работы. Поэтому при большом времени работы используют всевозможные методы коррекции БИНС от внешних источников информации. Тема 9. Исполнительные органы систем управления двухсредными аппаратами
( 4 часов, СРС – 3 часа)
Исполнительными
органами СУ траекторией движения ДСА
являются рулевые привода. Рулевой привод
преобразует слабый управляющий сигнал
из СУтд в физическое отклонение руля
(высоты, курса, элеронов).
В настоящее
время в подавляющем числе случаев на
ДСА используются линейные рулевые
привода. В линейном рулевом приводе
угол отклонения руля прямо пропорционален
управляющему сигналу от СУ. Линейность
соблюдается в некотором заданном
диапазоне управляющего сигнала. При
превышении управляющего сигнала зоны
линейности руль не реагирует на
управляющий сигнал.
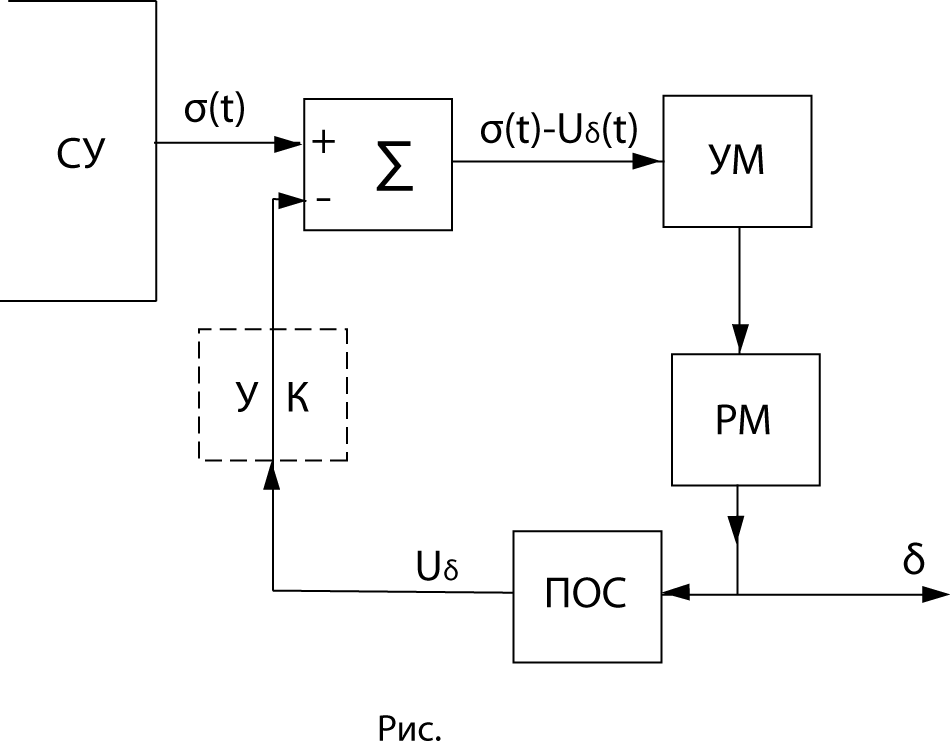
Структурная
схема линейного рулевого привода
приведена ниже.
Рулевой привод
состоит: из рулевой машинки РМ
, преобразующей подаваемый на нее
электрический сигнал в отклонение руля
с привлечение того или иного вида
энергии, потенциометра обратной связи
ПОС,
преобразующего фактическое положение
руля в электрический сигнал, возможно
наличие устройства коррекции УК,
разностного устройства (сумматора
![]() ),
формирующего разность между управляющим
сигналом от СУ и сигналом от ПОС, усилителя
мощности разностного сигнала УМ.
Работает рулевой привод следующим
образом. Пусть в начале работы
),
формирующего разность между управляющим
сигналом от СУ и сигналом от ПОС, усилителя
мощности разностного сигнала УМ.
Работает рулевой привод следующим
образом. Пусть в начале работы
![]() .
Тогда
.
Тогда
![]() .
Управляющий сигнал от СУ проходит через
сумматор
,
усиливается
УМ и
поступает на РМ.
.
Управляющий сигнал от СУ проходит через
сумматор
,
усиливается
УМ и
поступает на РМ.
 Выходной
шток или вал РМ начнет перемещаться до
тех пока сигнал на входе РМ не станет
равным нулю или шток РМ не достигнет
упора. Остановится перемещение штока
РМ при
Выходной
шток или вал РМ начнет перемещаться до
тех пока сигнал на входе РМ не станет
равным нулю или шток РМ не достигнет
упора. Остановится перемещение штока
РМ при
![]() ,
т.е. при
,
т.е. при
![]() .
Таким образом руль отклонится на величину
пропорциональную управляющему сигналу.
Устройство коррекции УК применяют для
улучшения динамических свойств рулевого
привода.
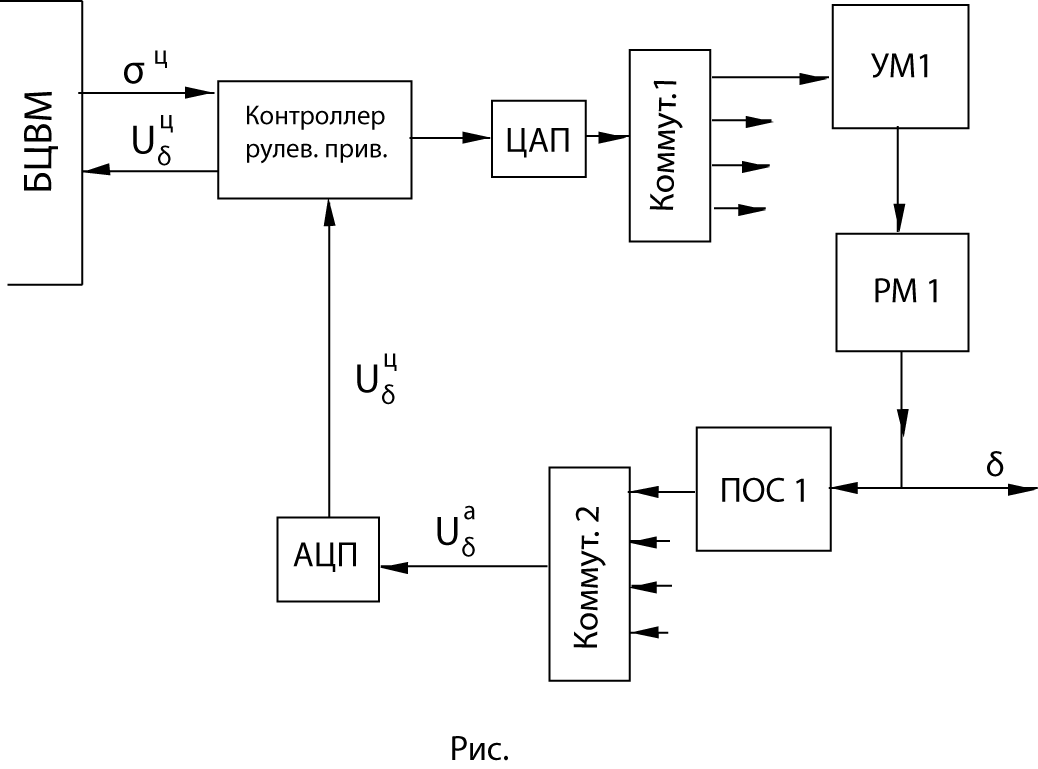
При использовании на
борту ЛА БЦВМ структура рулевого привода
приведена ниже. Управляющий сигнал в
цифровом виде поступает в блок управления
рулевыми приводами, конкретно на
контроллер управления рулевыми приводами.
Контроллер осуществляет функцию
взаимодействия с БЦВМ и поочередную
обработку информации для каждого (
обычно четырех) рулевого привода
(формирование разностного сигнала,
коррекции). В блоке есть два коммутатора
поочередно подключающих к контроллеру
разные рулевые привода. Также присутствует
АЦП и ЦАП.
.
Таким образом руль отклонится на величину
пропорциональную управляющему сигналу.
Устройство коррекции УК применяют для
улучшения динамических свойств рулевого
привода.
При использовании на
борту ЛА БЦВМ структура рулевого привода
приведена ниже. Управляющий сигнал в
цифровом виде поступает в блок управления
рулевыми приводами, конкретно на
контроллер управления рулевыми приводами.
Контроллер осуществляет функцию
взаимодействия с БЦВМ и поочередную
обработку информации для каждого (
обычно четырех) рулевого привода
(формирование разностного сигнала,
коррекции). В блоке есть два коммутатора
поочередно подключающих к контроллеру
разные рулевые привода. Также присутствует
АЦП и ЦАП.
 Типы рулевых приводов.
Классифицируются рулевые привода по
типу энергии подводимой для силового
использования привода. См. рисунок.
Типы рулевых приводов.
Классифицируются рулевые привода по
типу энергии подводимой для силового
использования привода. См. рисунок.
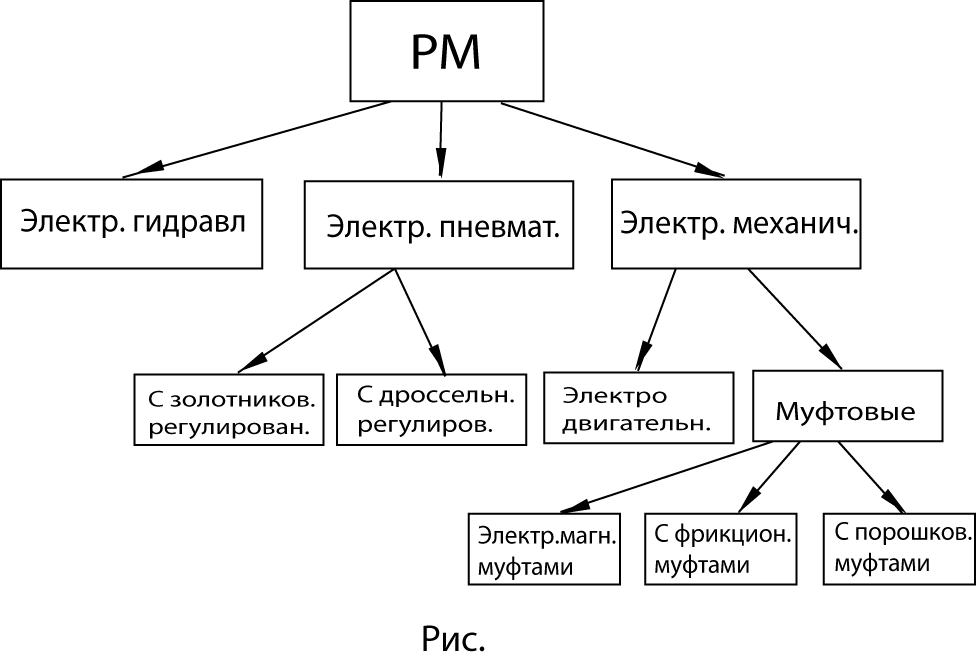 В
настоящее время в соответствии с типами
РП на рисунке используются три типа
энергии для рулевых приводов.
Это энергия жидкости находящейся под
давлением. В этом случае на борту аппарата
должен быть резервуар для жидкости
находящейся под давлением, резервуар
для жидкости, отдавшей энергию приводу
и насос накачивающий жидкость в резервуар
под давлением.
Это энергия газа
находящегося под давлением. На аппарате
газ под давлением содержится либо в
баллонах, закачиваемых при подготовке
аппарата, либо газ под давлением
вырабатывается в газогенераторах при
сжигании твердого топлива, либо
используется давление воздуха набегающего
потока.
И третий вид энергии это
электрическая энергия. На борту
используется электроэнергия либо от
аккумуляторов, либо от бортовых
электрогенераторов.
Далее РП
классифицируется по типу устройства,
управляющего газом или жидкостью под
давлением. Электрический РП подразделяется
на электродвигательный и муфтовый.
Муфтовый РП классифицируется по типу
используемой муфты.
Коротко
рассмотрим каждый РП. Начнем с
электрогидравлического РП.
Схематическое устройство электрогидравлической
РМ приведено на нижеследующем рисунке.
Устройство и принцип работы
электрогидравлической РМ. Силовым
элементом, преобразующим энергию
жидкости под давлением в механическую
энергию, является цилиндр с поршнем.
Шток поршня с одной стороны через
рычажный механизм отклоняет руль, с
другой стороны перемещает ползунок
потенциометра обратной связи ПОС на
величину, пропорциональную углу
отклонения руля. С ползунка потенциометра
снимается напряжение эквивалентное
углу отклонения руля. Управляет подачей
жидкости в пространство силовой цилиндр-
поршень механизм , называемый золотник.
На рисунке он изображен над силовым
цилиндром. Золотник состоит из цилиндра,
существенно меньшего по диаметру чем
силовой цилиндр и специальной формы
поршня, (например, силовой -50мм, золотник
– 3мм.). Поршень золотника состоит из
трех частей, размещенных на одном штоке.
На поверхности цилиндра золотника
имеются пять отверстий.
В
настоящее время в соответствии с типами
РП на рисунке используются три типа
энергии для рулевых приводов.
Это энергия жидкости находящейся под
давлением. В этом случае на борту аппарата
должен быть резервуар для жидкости
находящейся под давлением, резервуар
для жидкости, отдавшей энергию приводу
и насос накачивающий жидкость в резервуар
под давлением.
Это энергия газа
находящегося под давлением. На аппарате
газ под давлением содержится либо в
баллонах, закачиваемых при подготовке
аппарата, либо газ под давлением
вырабатывается в газогенераторах при
сжигании твердого топлива, либо
используется давление воздуха набегающего
потока.
И третий вид энергии это
электрическая энергия. На борту
используется электроэнергия либо от
аккумуляторов, либо от бортовых
электрогенераторов.
Далее РП
классифицируется по типу устройства,
управляющего газом или жидкостью под
давлением. Электрический РП подразделяется
на электродвигательный и муфтовый.
Муфтовый РП классифицируется по типу
используемой муфты.
Коротко
рассмотрим каждый РП. Начнем с
электрогидравлического РП.
Схематическое устройство электрогидравлической
РМ приведено на нижеследующем рисунке.
Устройство и принцип работы
электрогидравлической РМ. Силовым
элементом, преобразующим энергию
жидкости под давлением в механическую
энергию, является цилиндр с поршнем.
Шток поршня с одной стороны через
рычажный механизм отклоняет руль, с
другой стороны перемещает ползунок
потенциометра обратной связи ПОС на
величину, пропорциональную углу
отклонения руля. С ползунка потенциометра
снимается напряжение эквивалентное
углу отклонения руля. Управляет подачей
жидкости в пространство силовой цилиндр-
поршень механизм , называемый золотник.
На рисунке он изображен над силовым
цилиндром. Золотник состоит из цилиндра,
существенно меньшего по диаметру чем
силовой цилиндр и специальной формы
поршня, (например, силовой -50мм, золотник
– 3мм.). Поршень золотника состоит из
трех частей, размещенных на одном штоке.
На поверхности цилиндра золотника
имеются пять отверстий.
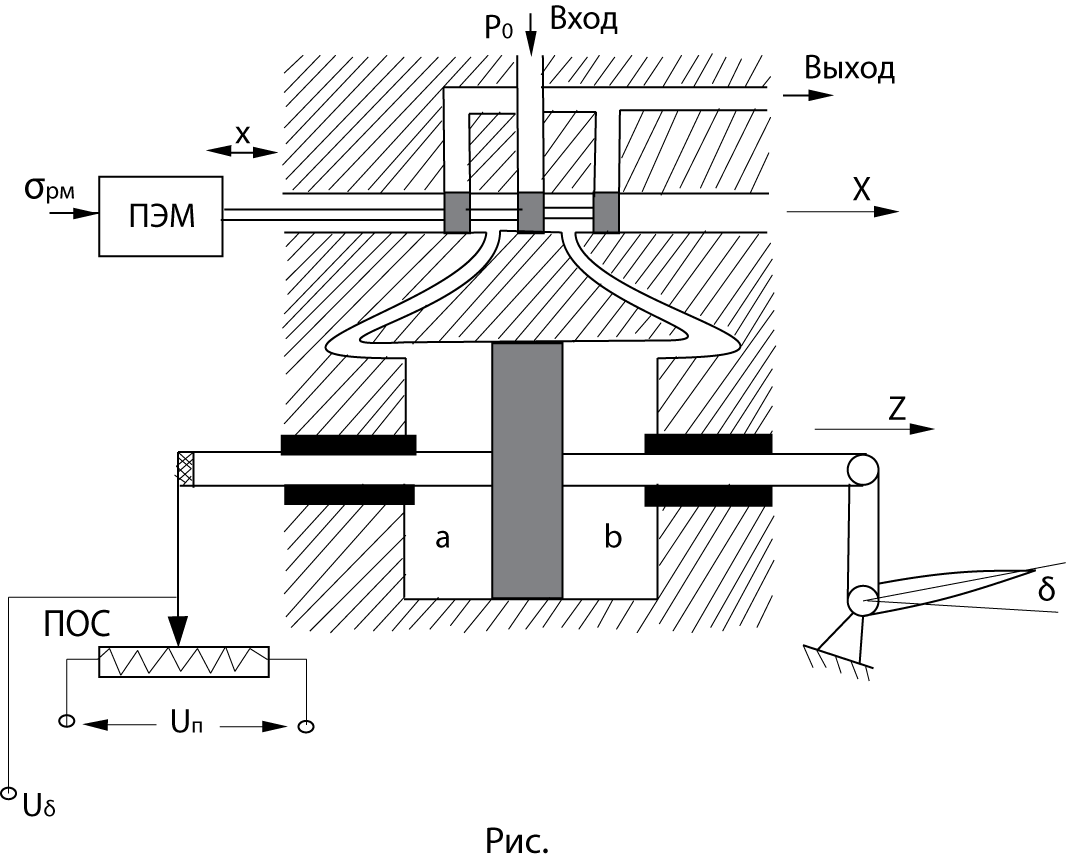 К
центральному верхнему отверстию
подводится рабочая жидкость под
давлением. Левое и правое верхние
отверстия объединены, и через них
сливается в дренажную емкость отработавшая
жидкость. Левое нижнее отверстие в
цилиндре золотника соединена с полостью
а
силового цилиндра. Правое нижнее
отверстие в цилиндре золотника соединена
с полостью b
силового цилиндра. Шток золотника
соединен с выходом поляризованного
электромагнита ПЭМ.
ПЭМ перемещает шток золотника
пропорционально сигналу
К
центральному верхнему отверстию
подводится рабочая жидкость под
давлением. Левое и правое верхние
отверстия объединены, и через них
сливается в дренажную емкость отработавшая
жидкость. Левое нижнее отверстие в
цилиндре золотника соединена с полостью
а
силового цилиндра. Правое нижнее
отверстие в цилиндре золотника соединена
с полостью b
силового цилиндра. Шток золотника
соединен с выходом поляризованного
электромагнита ПЭМ.
ПЭМ перемещает шток золотника
пропорционально сигналу
![]() ,
поступающему на электромагнит.
Принцип работы РМ состоит в следующем.
В исходном положении, изображенном на
рисунке, золотник находится в положении,
когда каналы подвода жидкости под
давлением и слива жидкости перекрыты.
Ход золотника обозначим величиной
,
поступающему на электромагнит.
Принцип работы РМ состоит в следующем.
В исходном положении, изображенном на
рисунке, золотник находится в положении,
когда каналы подвода жидкости под
давлением и слива жидкости перекрыты.
Ход золотника обозначим величиной
![]() (+ вправо). Подадим сигнал
(+ вправо). Подадим сигнал
![]() ,
пусть при этом шток золотника переместится
вправо
,
пусть при этом шток золотника переместится
вправо
![]() .
Откроется доступ жидкости под давлением
в полость а.
Из полости
b
откроется
доступ на дренаж. Силовой поршень начнет
перемещаться вправо до тех пока поршень
золотника не перекроет верхние отверстия
.
Откроется доступ жидкости под давлением
в полость а.
Из полости
b
откроется
доступ на дренаж. Силовой поршень начнет
перемещаться вправо до тех пока поршень
золотника не перекроет верхние отверстия
![]() ,
или пока поршень силового цилиндра не
дойдет до упора. Чем больше был перемещен
поршень золотника, тем больше была
площадь проходных отверстий в золотнике,
тем быстрее перемещался поршень силового
цилиндра.
Что может сделать
,
или пока поршень силового цилиндра не
дойдет до упора. Чем больше был перемещен
поршень золотника, тем больше была
площадь проходных отверстий в золотнике,
тем быстрее перемещался поршень силового
цилиндра.
Что может сделать
![]() .
Это сигнал ПЭМ
.
Это сигнал ПЭМ
![]() .
Согласно первому рисунку темы
.
Согласно первому рисунку темы
![]() .
Отсюда следует
.
Отсюда следует
![]() ,
или как только руль отклониться на
величину
,
или как только руль отклониться на
величину
![]() рулевая машинка перестанет отклонять
руль. Что нам и требуется. Аналогичная
картина получается при
рулевая машинка перестанет отклонять
руль. Что нам и требуется. Аналогичная
картина получается при
![]() .
Рассмотрим динамические свойства
электрогидравлического рулевого
привода.
Движение РМ при ряде
значительных упрощающих допущений
может быть описана следующим
дифференциальным уравнением.
.
Рассмотрим динамические свойства
электрогидравлического рулевого
привода.
Движение РМ при ряде
значительных упрощающих допущений
может быть описана следующим
дифференциальным уравнением.
![]() ,
(9.1)
где
,
(9.1)
где
![]() - нормированное перемещение золотника
- нормированное перемещение золотника
![]() ,
,
![]() - максимальная угловая скорость отклонения
руля при полностью открытом золотнике
и ненагруженной РМ,
- максимальная угловая скорость отклонения
руля при полностью открытом золотнике
и ненагруженной РМ,
![]() ,
где
,
где
![]() - передаточное отношение от хода штока
силового поршня к углу отклонения
руля,
- передаточное отношение от хода штока
силового поршня к углу отклонения
руля,
![]() - площадь сечения силового поршня,
- площадь сечения силового поршня,
![]() - максимальный расход жидкости,
- максимальный расход жидкости,
![]() ,
,
![]() - коэффициент расхода,
- коэффициент расхода,
![]() - максимальная площадь проходного
отверстия золотника.
Подставляя
в ДУ РМ выражение для
- максимальная площадь проходного
отверстия золотника.
Подставляя
в ДУ РМ выражение для
![]() получим
получим
![]() ,
подставляя
,
подставляя
![]() получим
получим
![]() (9.2)
Записывая
это ДУ в преобразовании Лапласа получим
(9.2)
Записывая
это ДУ в преобразовании Лапласа получим
![]() .
Передаточная
функция от
.
Передаточная
функция от
![]() к
к
![]() будет иметь вид
будет иметь вид
![]() .
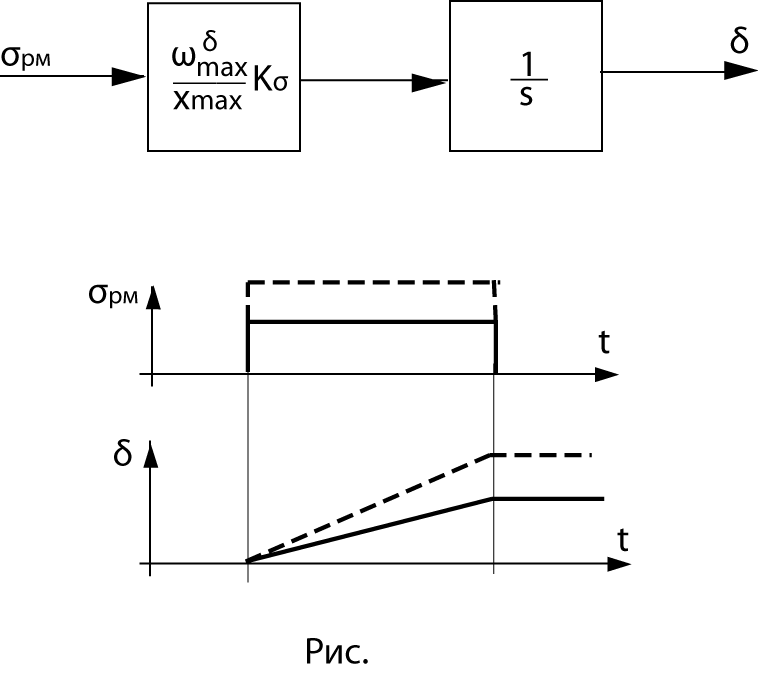
Структура
передаточной функции, а именно наличие
единственной компоненты зависящей от
вида
.
Структура
передаточной функции, а именно наличие
единственной компоненты зависящей от
вида
![]() говорит о том, что РМ от входа ПЭМ к углу
отклонения руля представляет интегрирующее
звено с масштабным коэффициентом
говорит о том, что РМ от входа ПЭМ к углу
отклонения руля представляет интегрирующее
звено с масштабным коэффициентом
![]() .
При подаче от СУ на ПЭМ сигнала
.
При подаче от СУ на ПЭМ сигнала
![]() в виде скачка (см. рис.) руль будет
отклоняться в виде линейной функции
(интеграл от константы). При обнулении
входного сигнала руль останется в
состоянии, которое наинтегрировалось
к моменту обнуления сигнала..
в виде скачка (см. рис.) руль будет
отклоняться в виде линейной функции
(интеграл от константы). При обнулении
входного сигнала руль останется в
состоянии, которое наинтегрировалось
к моменту обнуления сигнала..
 Ситуация совершенно измениться,
если на вход ПЭМ подать разность сигнала
от СУ и от ПОС РМ, как показано на рис.
Ситуация совершенно измениться,
если на вход ПЭМ подать разность сигнала
от СУ и от ПОС РМ, как показано на рис.
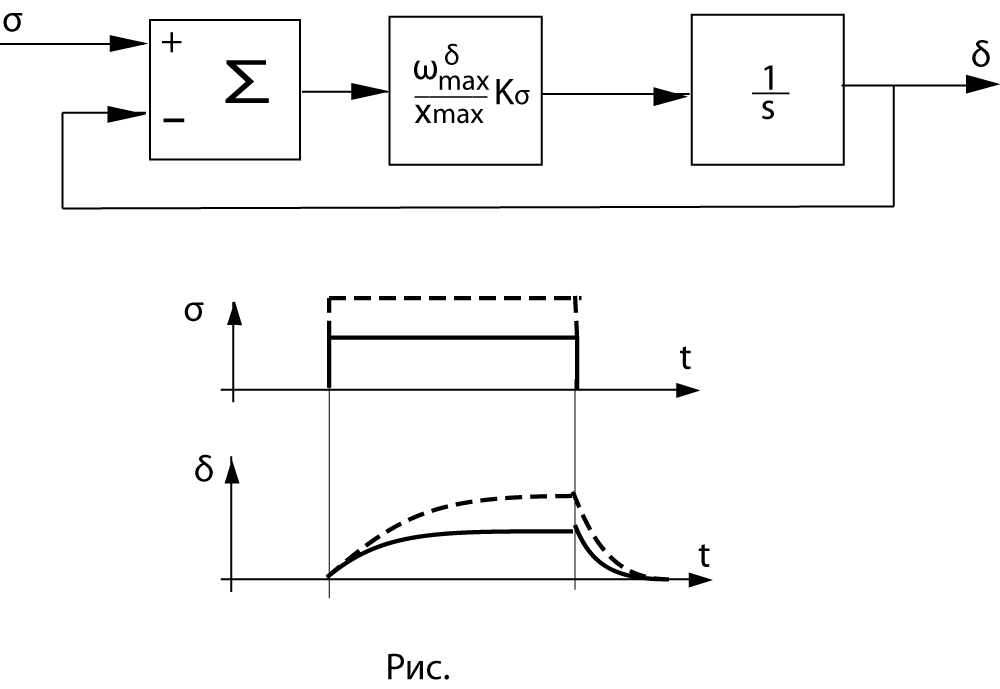 Такое
включение РМ называется включение с
обратной связью, а систему называю РП.
ДУ РП получим , заменив в ДУ (9.2)
Такое
включение РМ называется включение с
обратной связью, а систему называю РП.
ДУ РП получим , заменив в ДУ (9.2)
![]() .
.
![]() (9.3)
Передаточная
функция от управляющего сигнала от СУ
к углу отклонения руля примет вид
(9.3)
Передаточная
функция от управляющего сигнала от СУ
к углу отклонения руля примет вид
![]() ,
где
,
где
![]() .
Это
передаточное звено называют инерционным
с постоянной времени
.
Это
передаточное звено называют инерционным
с постоянной времени
![]() .
Зависимость выходного сигнала
от
скачкообразного входного
для
инерционного звена приведена на рисунке.
В первом приближении такой характер
зависимости выходной переменной от
входной присущ практически всем рулевым
приводам.
Полная математическая
модель РП представляет систему нелинейных
дифференциальных уравнений не решаемых
аналитически. Путем линеаризации удается
получить более точные линейные уравнения
движения привода чем приведенные выше.
Приведем линейные дифференциальные
уравнения гидравлической РМ, учитывающей
нагрузку на руль (шарнирный момент,
трение, инерционные силы, момент от
скорости перекладки руля). Без учета
сжимаемости жидкости эти уравнения
имеют вид.
.
Зависимость выходного сигнала
от
скачкообразного входного
для
инерционного звена приведена на рисунке.
В первом приближении такой характер
зависимости выходной переменной от
входной присущ практически всем рулевым
приводам.
Полная математическая
модель РП представляет систему нелинейных
дифференциальных уравнений не решаемых
аналитически. Путем линеаризации удается
получить более точные линейные уравнения
движения привода чем приведенные выше.
Приведем линейные дифференциальные
уравнения гидравлической РМ, учитывающей
нагрузку на руль (шарнирный момент,
трение, инерционные силы, момент от
скорости перекладки руля). Без учета
сжимаемости жидкости эти уравнения
имеют вид.
![]() ,
(9.4)
где
,
(9.4)
где
![]() - давление в магистрали жидкости,
- давление в магистрали жидкости,
![]() - перепад давления на поршне,
- перепад давления на поршне,
![]() - площадь поршня,
- площадь поршня,
![]() ,
,
![]() - момент приложенный из вне к рулям.
Уравнение
(9.4) дополняют уравнением для
- момент приложенный из вне к рулям.
Уравнение
(9.4) дополняют уравнением для
![]() (9.5)
Выражение
(9.5)
Выражение
![]() связывает уравнения (9.4) и (9.5). Система
(9.4) и (9.5) используется в модели РП с
обратной связью.
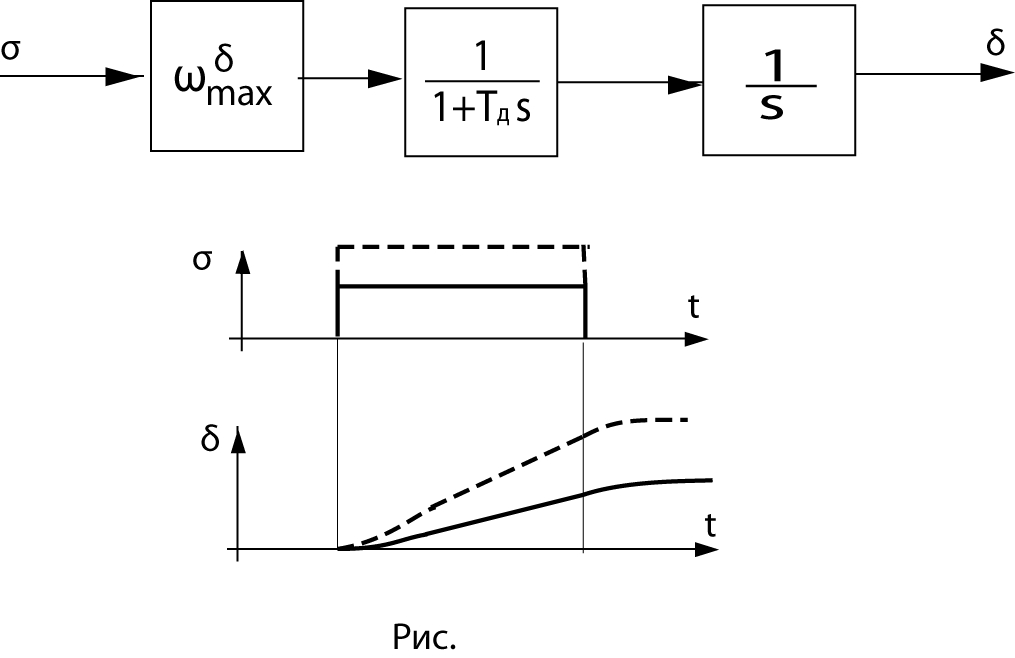
Рассмотрим
электропневматический рулевой привод.
Конструкция электропневматического
рулевого привода с золотниковым
распределительным механизмом в большей
части совпадает с гидравлическим рулевым
приводом. Упрощенное ДУ пневматической
РМ также совпадает с гидравлической
РМ, т.е.
.
Однако
степень приближения описания этим ДУ
движения реальной РМ еще меньше чем для
гидравлической РМ, т.к. газ сжимается и
расширяется значительно в большей
степени чем жидкость.
Более точная
модель пневматической РМ, учитывающая
упругие свойства газа, имеет следующий
вид.
связывает уравнения (9.4) и (9.5). Система
(9.4) и (9.5) используется в модели РП с
обратной связью.
Рассмотрим
электропневматический рулевой привод.
Конструкция электропневматического
рулевого привода с золотниковым
распределительным механизмом в большей
части совпадает с гидравлическим рулевым
приводом. Упрощенное ДУ пневматической
РМ также совпадает с гидравлической
РМ, т.е.
.
Однако
степень приближения описания этим ДУ
движения реальной РМ еще меньше чем для
гидравлической РМ, т.к. газ сжимается и
расширяется значительно в большей
степени чем жидкость.
Более точная
модель пневматической РМ, учитывающая
упругие свойства газа, имеет следующий
вид.
![]() ,
(9.6)
где
,
(9.6)
где
![]() - перепад давлений на поршне,
- перепад давлений на поршне,
![]() ,
,
![]() .
Уравнение
(9.6) следует дополнить ДУ для момента
действующего на рули (9.5) и связью
.
Электродвигательный
рулевой привод.
В этом приводе в качестве силового
элемента используется электрический
двигатель. На одну обмотку двигатель
постоянно подается напряжение
электропитания. На другую обмотку
подается усиленное управляющее
напряжение, позволяющее двигателю
вращаться быстро или медленно, в одну
или другую сторону. Вал электродвигателя
через редуктор связан с осью руля. На
выходном валу редуктора размещен
потенциометр обратной связи, позволяющий
реализовать систему с обратной связью.
Структурная схема электродвигательного
рулевого привода
приведена ниже.
.
Уравнение
(9.6) следует дополнить ДУ для момента
действующего на рули (9.5) и связью
.
Электродвигательный
рулевой привод.
В этом приводе в качестве силового
элемента используется электрический
двигатель. На одну обмотку двигатель
постоянно подается напряжение
электропитания. На другую обмотку
подается усиленное управляющее
напряжение, позволяющее двигателю
вращаться быстро или медленно, в одну
или другую сторону. Вал электродвигателя
через редуктор связан с осью руля. На
выходном валу редуктора размещен
потенциометр обратной связи, позволяющий
реализовать систему с обратной связью.
Структурная схема электродвигательного
рулевого привода
приведена ниже.
 Управляющий
сигнал
от СУ и сигнал обратной связи
Управляющий
сигнал
от СУ и сигнал обратной связи
![]() поступают
на разностное устройство. На выходе
разностного устройства образуется
сигнал ошибки
поступают
на разностное устройство. На выходе
разностного устройства образуется
сигнал ошибки
![]() .
Сигнал ошибки показывает на сколько и
в какую сторону фактическое положение
руля отличается от требуемого СУ. После
усиления сигнал ошибки подается на
управляющую обмотку электродвигателя.
Двигатель вращается в сторону уменьшения
сигнала ошибки. Как только сигнал ошибки
станет равным нулю двигатель перестанет
вращаться.
В разомкнутом виде
(когда нет обратной связи) динамические
свойства РМ в основном определяются
динамическими свойствами двигателя.
Упрощенную передаточную функцию
разомкнутой электродвигательной РМ
можно записать как
.
Сигнал ошибки показывает на сколько и
в какую сторону фактическое положение
руля отличается от требуемого СУ. После
усиления сигнал ошибки подается на
управляющую обмотку электродвигателя.
Двигатель вращается в сторону уменьшения
сигнала ошибки. Как только сигнал ошибки
станет равным нулю двигатель перестанет
вращаться.
В разомкнутом виде
(когда нет обратной связи) динамические
свойства РМ в основном определяются
динамическими свойствами двигателя.
Упрощенную передаточную функцию
разомкнутой электродвигательной РМ
можно записать как
![]() где
где
![]() постоянная времени электродвигателя,
определяемая моментом инерции его
ротора. Структурно электродвигательную
разомкнутую РМ и ее реакцию на
скачкообразный управляющий сигнал
можно изобразить следующим образом.
постоянная времени электродвигателя,
определяемая моментом инерции его
ротора. Структурно электродвигательную
разомкнутую РМ и ее реакцию на
скачкообразный управляющий сигнал
можно изобразить следующим образом.
При замыкании РМ
обратной связью без КУ передаточная
функция РП будет иметь второй порядок.
Корни характеристического уравнения
могут быть как действительными
отрицательными, так и комплексно
сопряженными с отрицательными
действительными частями в зависимости
от инерционности двигателя и коэффициента
усиления РМ. При комплексно сопряженных
корнях характеристического уравнения
применяют корректирующее устройство
КУ для улучшения качества переходных
процессов в РП.
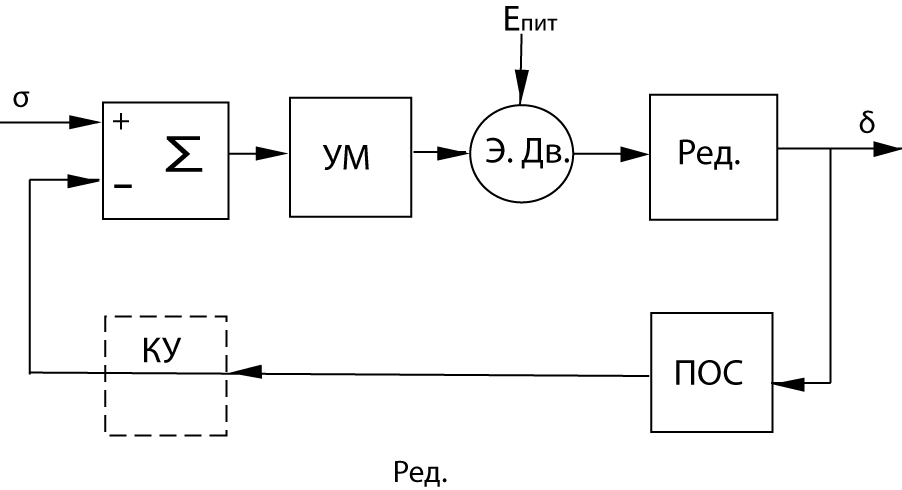
Рассмотрим
электромеханический фрикционный РП.
Функциональная схема фрикционного РП
приведена ниже. Работает этот привод
следующим образом.
1) При появлении
бортового электропитания Епит
начинает
вращаться электродвигатель М
. Он вращается в одном направлении все
время полета ЛА.
2) Если
и
![]() ,
то оба электромагнита ЭМ1
и ЭМ2
выключены, муфты Муф1
и
Муф2
разомкнуты, и
вращательное движение от электродвигателя
не передается на редуктор Редук.
и далее на
выходной вал отклонения руля.
3) При
подаче на вход привода положительного
управляющего сигнала
включится электромагнит ЭМ1
, замкнется
муфта Муф1,
и вращательное
движение от электродвигателя через
муфту Муф1 и
редуктор будет передаваться на выходной
вал, отклоняя руль
в
положительную сторону.
При подаче
на вход привода отрицательного
управляющего сигнала
включится электромагнит ЭМ2,
замкнется муфта Муф2,
и вращательное
движение от электродвигателя через
муфту Муф2 и
редуктор будет передаваться на выходной
вал, отклоняя руль
в
отрицательную сторону.
4) При изменении
угла отклонения руля перемещается
ползунок потенциометра обратной связи
ПОС,
изменяя
напряжение
,
то оба электромагнита ЭМ1
и ЭМ2
выключены, муфты Муф1
и
Муф2
разомкнуты, и
вращательное движение от электродвигателя
не передается на редуктор Редук.
и далее на
выходной вал отклонения руля.
3) При
подаче на вход привода положительного
управляющего сигнала
включится электромагнит ЭМ1
, замкнется
муфта Муф1,
и вращательное
движение от электродвигателя через
муфту Муф1 и
редуктор будет передаваться на выходной
вал, отклоняя руль
в
положительную сторону.
При подаче
на вход привода отрицательного
управляющего сигнала
включится электромагнит ЭМ2,
замкнется муфта Муф2,
и вращательное
движение от электродвигателя через
муфту Муф2 и
редуктор будет передаваться на выходной
вал, отклоняя руль
в
отрицательную сторону.
4) При изменении
угла отклонения руля перемещается
ползунок потенциометра обратной связи
ПОС,
изменяя
напряжение
![]() .
Как только
станет равным
,
т.е.
.
Как только
станет равным
,
т.е.
![]() ,
электромагнит ЭМ1
или
ЭМ2 выключится
, муфта 1 или 2 разомкнется, и вращательное
движение на выходной вал не будет
передаваться. Руль остановится в
положении
,
электромагнит ЭМ1
или
ЭМ2 выключится
, муфта 1 или 2 разомкнется, и вращательное
движение на выходной вал не будет
передаваться. Руль остановится в
положении
![]() ,
что и требовалось (
,
что и требовалось (![]() за
счет зоны нечувствительности релейных
элементов РЭ1,
РЭ2).
за
счет зоны нечувствительности релейных
элементов РЭ1,
РЭ2).
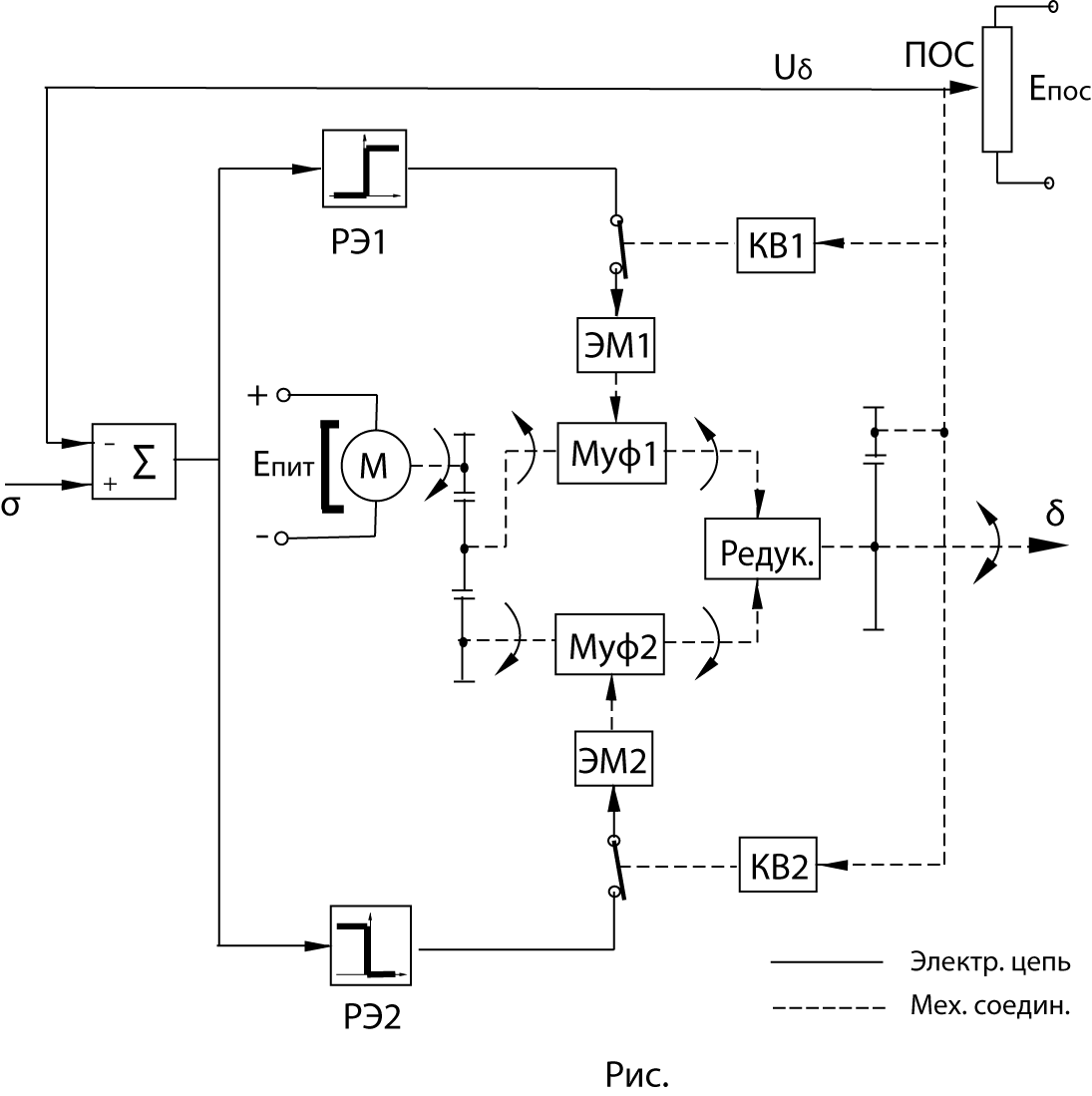 5)
Максимальное отклонение руля контролируется
концевыми выключателями КВ1
или КВ2
путем прекращения подачи сигнала от
релейного элемента на электромагнит.
Механическое ограничение угла отклонения
руля на этом РП недопустимо т.к это может
привести к разрушению привода (редуктор,
муфта, двигатель).
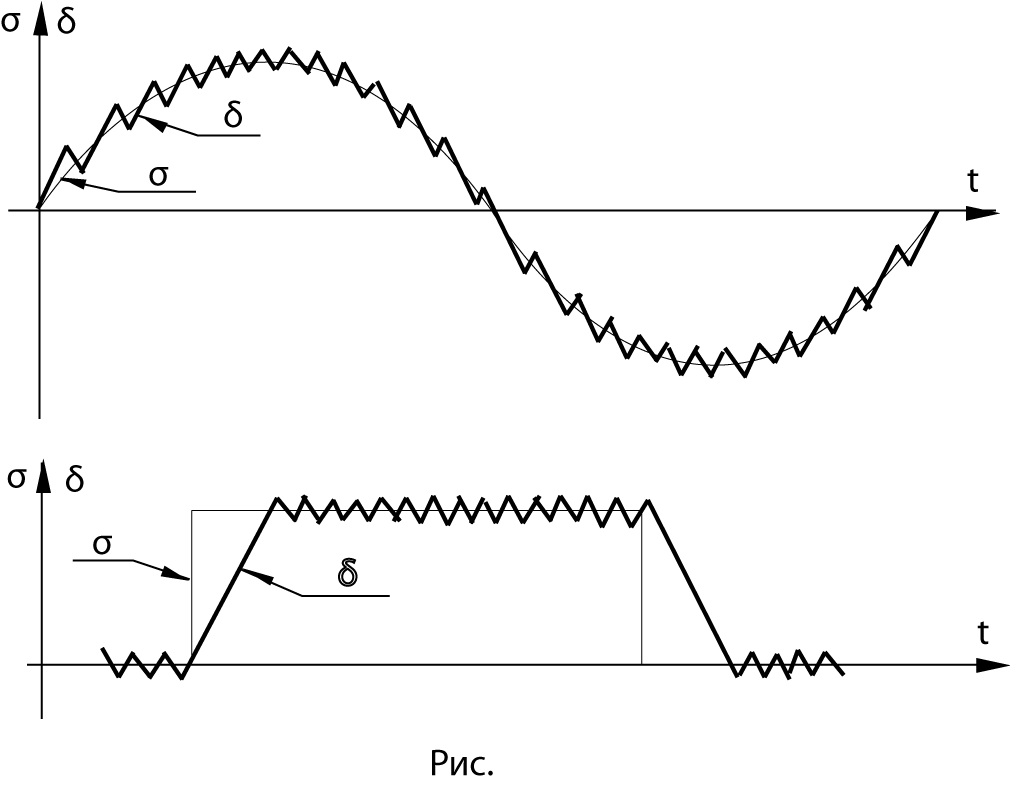
При работе
фрикционного рулевого привода руль
совершает малые частые колебания
относительно значения управляющего
сигнала
,
как показано на следующем рисунке.
Фактически за счет упругости механических
связей эти колебания частично сглаживаются
в приводе и полностью отфильтровываются
самим ЛА, как значительно более инерционным
объектом чем РМ.
5)
Максимальное отклонение руля контролируется
концевыми выключателями КВ1
или КВ2
путем прекращения подачи сигнала от
релейного элемента на электромагнит.
Механическое ограничение угла отклонения
руля на этом РП недопустимо т.к это может
привести к разрушению привода (редуктор,
муфта, двигатель).
При работе
фрикционного рулевого привода руль
совершает малые частые колебания
относительно значения управляющего
сигнала
,
как показано на следующем рисунке.
Фактически за счет упругости механических
связей эти колебания частично сглаживаются
в приводе и полностью отфильтровываются
самим ЛА, как значительно более инерционным
объектом чем РМ.
 Основное преимущество электрофрикционного
рулевого привода по сравнению с
электродвигательным это высокое
быстродействие, приближающееся к
электропневматическому РП. Однако в
настоящее время проводятся разработки
мощных малоинерционных электродвигателей
переменного тока, и возможно появление
быстродействующего электродвигательного
РП как более простой альтернативы
электрофрикционному РП.
Основные
требования, предъявляемые к РП сводятся
к следующему
1) Функциональные
требования.
а) Усилие,
развиваемое РП при заданной скорости
перекладки руля.
б)
Скорость перекладки руля при заданном
усилии (момента)
2) Габаритно-весовые
характеристики и энергопотребление.
3)
Эксплуатационные характеристики:
надежность работы, условия хранения,
условия эксплуатации
Основное преимущество электрофрикционного
рулевого привода по сравнению с
электродвигательным это высокое
быстродействие, приближающееся к
электропневматическому РП. Однако в
настоящее время проводятся разработки
мощных малоинерционных электродвигателей
переменного тока, и возможно появление
быстродействующего электродвигательного
РП как более простой альтернативы
электрофрикционному РП.
Основные
требования, предъявляемые к РП сводятся
к следующему
1) Функциональные
требования.
а) Усилие,
развиваемое РП при заданной скорости
перекладки руля.
б)
Скорость перекладки руля при заданном
усилии (момента)
2) Габаритно-весовые
характеристики и энергопотребление.
3)
Эксплуатационные характеристики:
надежность работы, условия хранения,
условия эксплуатации