

Тема 5. Элементы структурной организации бортовых вычислительных систем. Варианты структур интегрированных комплексов бортовых автоматических систем.
( 2 часа, СРС – 1,5 час)
Бортовые вычислительные системы являются в настоящее время неотъемлемой частью ИБАС ДСА. Более того, они используются центральным узлом ИБАС в подсистемах инерциальной навигации, управления траекторией движения, в подсистемах обнаружения и пеленгации целей, самонаведения и самоконтроля.
Современная универсальная БЦВМ разрабатывается и изготавливается по модульному принципу и содержит в своем составе: 1) модуль центрального процессора (ЦП), 2) модули оперативной памяти (ОЗУ), 3) постоянной памяти (ПЗУП – программ, ПЗУК - констант), 4) канал ввода-вывода, 5) источник питания.
Программное обеспечение (ПО) БЦВМ является ее важнейшей частью и отражает содержание алгоритмического обеспечения, специфику его структуры, а также определяет эффективность его применения.
Основными функциями ПО являются
- выполнение вычислений и логических операций согласно заданному алгоритму;
- перестроение конфигурации технических средств;
- предоставление разработчику удобств при программировании и отладке задач.
В качестве ПЗУ может использоваться перепрограммируемое ПЗУ (например, флэш-память). Это полезно при отладке ПО (и всей ИБАС), но не только. Возможность загрузки другого программного обеспечения перед погрузкой ДСА на носитель или перед стартом позволяет значительно расширить возможности ИБАС и всего аппарата в целом.
Канал ввода-вывода предназначен для организации обмена информацией между ЦП и периферийными устройствами. Канал представляет собой специализированный процессор.
В зависимости от характера обслуживания каналы бывают мультиплексные и селекторные. Мультиплексные каналы предназначены для обслуживания большого числа относительно медленно действующих объектов в режиме разделения времени. Селекторные каналы обслуживают только одно быстродействующее устройство и в этом смысле работают в монопольном режиме.
Мультиплексный канал по объему оборудования превосходит селекторный канал и может работать как в мультиплексном режиме, так и в монопольном.
Оборудование канала ввода-вывода может выполняться в виде отдельных блоков (модулей) или входить в состав ЦП как отдельный модуль в зависимости от степени интеграции оборудования и элементной базы.
Рост объема вычислений, связанных с увеличением выполняемых функций и усложнением вычислительных алгоритмов, приводит к тому, что БЦВМ становятся многопроцессорными или даже на борту устанавливается несколько взаимосвязанных БЦВМ, т.е. образуются бортовые вычислительные системы.
Современная бортовая вычислительная система помимо вышеперечисленных модулей БЦВМ содержит еще устройства управления периферийными элементами (контроллеры), периферийные устройства (абоненты), коммутаторы магистралей и таймер.
Модули вычислительной системы аппарата соединяются между собой с помощью унифицированных систем связей. Унифицированные системы связей между модулями вычислительной системы называются интерфейсами.
Интерфейс включает в себя следующие элементы
- магистраль для передачи или приема информации;
- устройство для приема- передачи информации;
- протоколы, определяющие логическую организацию обмена информацией.
В вычислительных системах выделяют несколько типов интерфейсов, таких как
- процессор – память, используемый чаще всего между ЦП и ЗУ. Это самый быстродействующий интерфейс. Обмен информацией происходит в параллельной форме – байтами (8 цепей) или словами, содержащими несколько байт. Магистрали этих интерфейсов коротки – могут быть внутри одной печатной платы, или между платами, или, в крайнем случае, между близко расположенными блоками;
- интерфейс ввода – вывода. Магистрали этого интерфейса достаточно протяженны (в длину аппарата) и могут подвергаться различным помехам. Передача информации чаще всего происходит последовательно по коаксиальному кабелю, либо по симметричному кабелю, витой паре и т.д. с гальванической развязкой между приемником и передатчиком (изолированы по постоянному току).
В общем случае в магистралях ввода – вывода и периферийных устройств обмен может производиться различными типами сигналов: импульсными, релейными и т.д., что порождает широкую номенклатуру необходимых приемников, передатчиков и дополнительных согласующих устройств.
В настоящее время для большеразмерных ЛА и с большим объемом бортового оборудования не исключается вопрос об использовании оптических линий связи, что обусловлено
- невосприимчивостью к электромагнитным помехам;
- пожаробезопасностью и устойчивостью к высоким температурам;
- полной электрической изоляцией, исключающей возникновение коротких замыканий;
- широкой полосой пропускания;
- отсутствием необходимости заземления;
- малой массой.
Необходимо отметить, что протоколы для интерфейсов с параллельной и последовательной передачей информации стандартизированы как на внутри российском уровне, так и на международном.
Для однобитовых каналов существует достаточная свобода выбора.
Подтема: Варианты структуры интегрированных комплексов бортовых автоматических систем
Интегрированный комплекс бортовых автоматических систем (ИКБАС) образуется при объединении функций подсистем и их программно-аппаратных средств на единой информационной основе. Объединение производится для достижения принципиально новых свойств комплекса и максимальной эффективности применения ДСА в целом. Интеграция производится с учетом ограничений на техническую реализуемость и ресурсы бортового оборудования.
Неотъемлемой и существенной частью ИКБАС является автоматизированная система управления (АСУ) ИКБАС. Ядро АСУ составляет бортовая вычислительная система.
Основным назначением АСУ ИКБАС является повышение эффективности функционирования комплекса за счет улучшения использования имеющихся ресурсов.
Помимо АСУ в ИКБАС входит ряд упомянутых ранее подсистем: система управления траекторией движения ДСА, навигационная система, система обнаружения и пеленгации целей, система управления огневыми цепями и т.д. – они перечислены в 1-й лекции.
При формировании структуры ИКБАС возможна различная степень интеграции. Если выстроить по одной линии структуры ИКБАС, начиная от малой степени интеграции и кончая максимальной, то в начале будет стоять комплекс, состоящий из ряда подсистем, обособленных аппаратурно. Например, есть блок АСУ, блок СУ траекторией движения, блок СОП и т.д. Все эти блоки объединяются каналом передачи информации и находятся во взаимосвязи под управлением блока АСУ. Структурная схема такой ИКБАС представлена на рис.7.
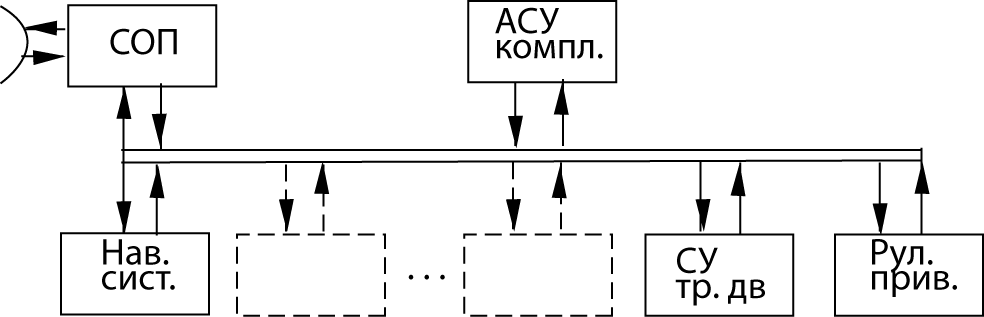 Рис.7
Рис.7
На этой схеме датчики состояния внешней среды и состояния ДСА входят в состав соответствующей подсистемы, как впрочем и исполнительные устройства (электроклапаны, запалы, пирозапалы и т.д.) В приведенном варианте ИКБАС осуществляется только информационная
интеграция.На другом конце будет стоять комплекс не только с информационной, но и в максимальной степени с аппаратурной интеграцией. Укрупненная структурная схема такой ИКБАС приведена на рис 8.
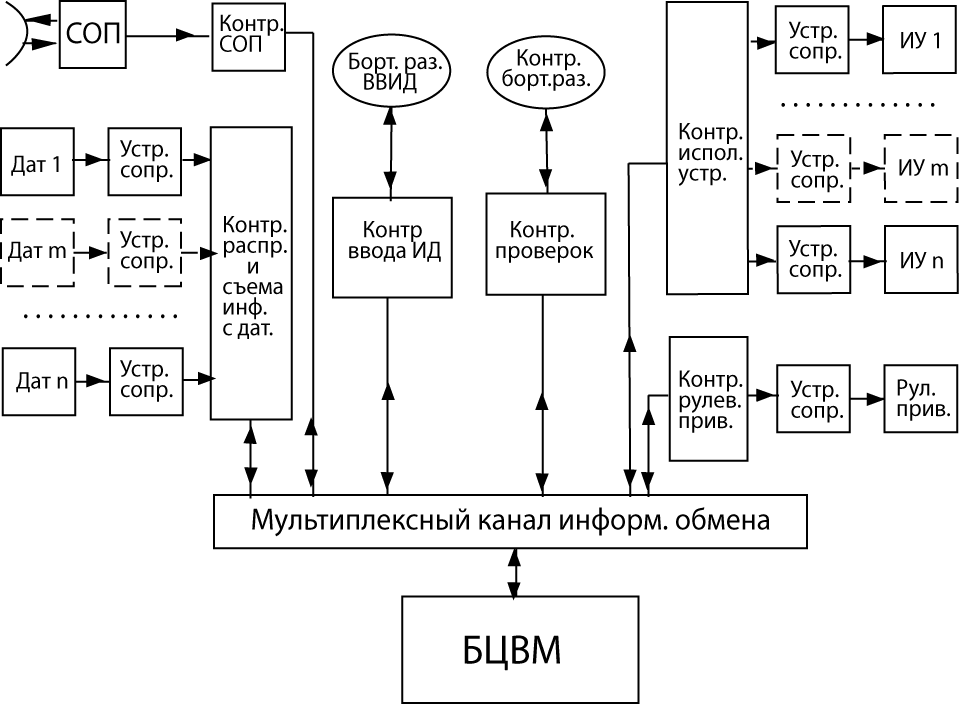 Рис. 8
Ядром
этого интегрированного комплекса
бортовой автоматической системы (ИКБАС)
является мощная бортовая вычислительная
машина, которая выполняет основные
вычислительные задачи комплекса. В
качестве примера можно сказать, что
одна современная БЦВМ для ДСА имеет
процессорный узел из 10 одновременно
работающих высокопроизводительных
микропроцессоров. Связь с периферийными
устройствами осуществляется по
мультиплексному
каналу связи.
Периферийные устройства – датчики,
исполнительные устройства – выходят
на мультиплексный канал через
соответствующие контроллеры (чаще всего
однокристальные микро-ЭВМ). Датчики и
исполнительные устройства соединяются
с контроллерами через согласующие
устройства. В состав согласующих
устройств входят усилительные элементы,
АЦП, ЦАП, коммутирующие элементы. Один
АЦП обычно обслуживает несколько
датчиков через коммутирующие элементы
в режиме разделения времени. ЦАП может
тоже обслуживать несколько исполнительных
устройств через коммутаторы в режиме
разделения времени.
Важно иметь
в виду, что приведенная структура
является крайней в ряду структур ИКБАС.
Реальные же системы всегда находятся
внутри крайних вариантов. Чем реальные
системы ИКБАС могут отличаться от
приведенной?
Рис. 8
Ядром
этого интегрированного комплекса
бортовой автоматической системы (ИКБАС)
является мощная бортовая вычислительная
машина, которая выполняет основные
вычислительные задачи комплекса. В
качестве примера можно сказать, что
одна современная БЦВМ для ДСА имеет
процессорный узел из 10 одновременно
работающих высокопроизводительных
микропроцессоров. Связь с периферийными
устройствами осуществляется по
мультиплексному
каналу связи.
Периферийные устройства – датчики,
исполнительные устройства – выходят
на мультиплексный канал через
соответствующие контроллеры (чаще всего
однокристальные микро-ЭВМ). Датчики и
исполнительные устройства соединяются
с контроллерами через согласующие
устройства. В состав согласующих
устройств входят усилительные элементы,
АЦП, ЦАП, коммутирующие элементы. Один
АЦП обычно обслуживает несколько
датчиков через коммутирующие элементы
в режиме разделения времени. ЦАП может
тоже обслуживать несколько исполнительных
устройств через коммутаторы в режиме
разделения времени.
Важно иметь
в виду, что приведенная структура
является крайней в ряду структур ИКБАС.
Реальные же системы всегда находятся
внутри крайних вариантов. Чем реальные
системы ИКБАС могут отличаться от
приведенной?
Во-первых, БЦВМ может быть не одна, а две и более. (Не имеется в виду наличие контроллеров на периферийном оборудовании, хотя они также являются ЭВМ, но, в основном, с функцией организации взаимодействия периферийного оборудования с БЦВМ). Необходимость второй БЦВМ может быть связана со значительным увеличением объема вычислительных работ, например, в таких подсистемах, как СОП (статистическая обработка случайных сигналов). Вычислительные потребности резко возрастают во время обнаружения и пеленгации целей при малом отношении сигнала к шуму.
Во-вторых, наличие разнообразных каналов обмена информацией с периферийным оборудованием. Конечно, мультиплексный канал обмена решает многие проблемы, но не все. Нужно помнить, что мультиплексный канал работает в режиме разделения времени, что не во всех случаях устраивает – выбирают канал обмена другого типа. С другой стороны, для передачи однобитных сигналов в одну сторону и на малые расстояния мультиплексный канал слишком избыточен. Для сокращения объема оборудования, повышения надежности системы применяют более простые каналы связи (для срабатывания пиропатрона достаточно двух проводников в кабеле).
В-третьих, наличие в ИКБАС информационных цепей, не связанных с работой БЦВМ. Например, информационные цепи в подсистеме обеспечения безопасности функционирования ДСА.
В целом реальный ИКБАС, что важно, должен в максимальной степени удовлетворять техническим требованиям на комплекс.
Для каждого варианта технического задания должен существовать наилучший вариант структуры ИКБАС.
Это не значит, что для разных аппаратов одного класса ДСА ИКБАС могут значительно отличаться.