

63.Короткі відомості з історії створення глобальних навігаційних супутникових систем.
Успішний запуск ШСЗ виявили високу стабільність супутників на орбіті за певними обстеженнями. Тому було створено навч. систем. (НС), яка б дозволяла визначати положення швидк. та напрям руху об’єктів в будь-якій точці на фізичній поверхні Землі, або поблизу її. Тому створення глобальної всесвітньої навігаційної системи виникла в союзі.
Першою ГНС була створена військовими США. До її створення приступили з 1958 році, а з 1964 -1967 рр. було запущено і супутники.
В радянському союзі була розроблена система ГЛОНАС.
Система NEWSTAR GPS зацікавило геодезистів своєю точністю положення наземних точок. Її впровадили в геодезичне виробництво. На даний час система використовується для спостереження рухом Землі, побудування мереж та топографічних і кадастрових систем.
64.Глобальні системи позиціювання – gps - системи.
Геодезичні прилади, створені сьогодні за новітніми технологіями, є доволі досконалими. Проте, незважаючи на це, точність геодезичних вимірювань на земній поверхні традиційними способами все-таки обмежена, зокрема внаслідок постійних змін параметрів приземного прошарку атмосфери. Альтернативним розв'язком цієї проблеми є просторові вимірювання, для яких використовують штучні супутники Землі (ШСЗ), що безперервно рухаються як носії координатної системи. Вимірювальні комплекси, які базуються на цьому принципі, називають глобальними системами позиціонування (СР8). Положення пунктів на поверхні Землі отримують відносно ШСЗ способом кутової або лінійної засічки у момент часу виконання вимірювань. Системи ШСЗ безперервно випромінюють радіохвилі. Щоб визначити просторове положення пункту або об'єкта, на ньому необхідно встановити приймач, який приймає коливання з декількох супутників, принаймні, не менше ніж трьох. Вимірювання параметрів прийнятних коливань і опрацювання їх дають змогу обчислити віддалі від приймача до супутників, а відтак і просторові координати приймача. Найточніше вимірювати віддалі фазовим способом, яким вимірюють різницю фаз двох когерентних коливань, одні з яких двічі пройшли вимірювану лінію, а шлях інших практично дорівнює нулеві.
Оскільки коливання проходять шлях від супутника до приймача одноразово, останній устатковують таким самим генератором радіохвиль, який є на кожному ШСЗ системи. Коливання, генеровані приймачем, мають таку саму частоту, що й коливання хвиль, які випромінює супутник. Генератори приймача й супутника мають бути синхронізовані, тобто фази коливань, генерованих супутником і приймачем, є однаковими в один і той самий момент часу.
65.Будова системи navstar/gps.
Орбітальне угруповання цієї системи містить 24 штатних НКА на кругових орбітах синхронних з періодом обертання Т = 12 год 00 хв (висота орбіти становить близько 20 000 км над поверхнею Землі) в шести орбітальних площинах (по чотири НКА в кожній) з нахилом 55 °, довготи висхідних вузлів яких зміщені з інтервалом 60 °.
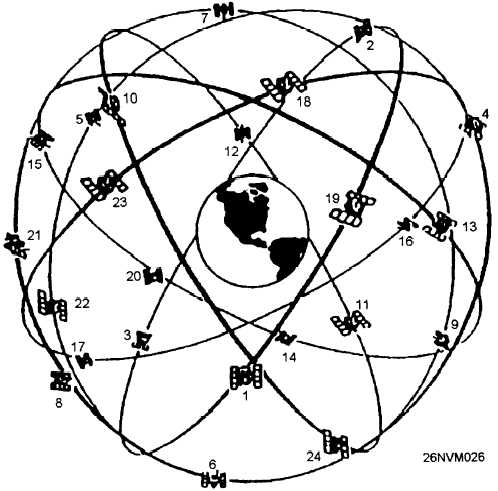
Схема формування сигналів супутника системи GPS містить два несучих коливання частотою 1575,42 МГц (L1) і 1227,6 МГц (L2), які модулюють в фазових модуляторах 3-4 (маніпуляції фази несучого коливання на 180 °) псевдовипадковими сигналами С/А- і Р-коду, попередньо підсумованим по модулю 2 елементами 1, 2 ВИКЛЮЧАЄ АБО з навігаційним сигналом NAV, який передається зі швидкістю 50 біт / с. З малюнка видно, що несуча L2 модулюється тільки сумарним сигналом Р-коду, тоді як L1 - сумарними сигналами С/А- і Р-коду. В останньому випадку кодові сигнали знаходяться в квадратурі (зрушені на 90 °).