

Зі спеціальності 7.05020201"Автоматизоване управління технологічними процесами"
(бакалавр, спеціаліст, магістр)
Паспорт задачі до білету № 27 Голова комісії_проф. Ладанюк А.П.
Укладач_доц.Власенко Л.О.
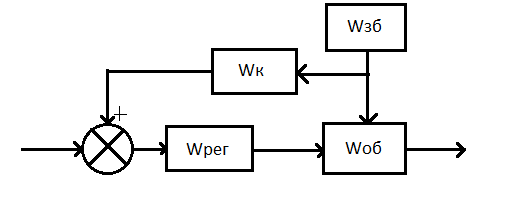
Визначити вид компенсатора,
розрахувати його значення, якщо
компенсатор підімкнений на вхід
регулятора.
![]() ,
,
![]() ,
ПI-регулятор:
,
ПI-регулятор:![]()
![]()
Побудувати структурну схему, зробити висновок про фізичну реалізуємість компенсатора.
Розв`язання :
![]()
Звідси робимо висновок, що компенсатор – реальна диференціювальна ланка, яка фізично реалізуєма.
___________________________________________________________________________________________________________________________
___________________________________________________________________________________________________________________________
Підпис укладача__________________
Підпис голови комісії______________
Дата____________________________
НУХТ, фахова атестаційна комісія ОКР спеціаліст
Зі спеціальності 7.05020201"Автоматизоване управління технологічними процесами"
(бакалавр, спеціаліст, магістр)
Паспорт задачі до білету № 17 Голова комісії_проф. Ладанюк А.П.
Укладач_доц.Власенко Л.О.
Визначити вид компенсатора,
розрахувати його значення, якщо
компенсатор підімкнений на вхід
регулятора
,
,
П-регулятор.
![]() .
.
Побудувати структурну схему, зробити висновок про фізичну реалізуємість компенсатора.
Розв`язання :
![]()
Звідси робимо висновок, що компенсатор - підсилювальна ланка, яка фізично реалізуєма..
___________________________________________________________________________________________________________________________
Підпис укладача__________________
Підпис голови комісії______________
Дата____________________________
НУХТ, фахова атестаційна комісія ОКР спеціаліст
Зі спеціальності 7.05020201"Автоматизоване управління технологічними процесами"
(бакалавр, спеціаліст, магістр)
Паспорт задачі до білету № 16 Голова комісії_проф. Ладанюк А.П.
Укладач_ст. викл. Архангельська К.С.
Чому повинно дорівнювати значення настройки П-регулятора Крег , щоб замкнена система знаходилась на межі стійкості
![]()
Розв`язання :
![]() ;
;

Для визначення скористаємося критерієм стійкості Рауса-Гурвиця, для чого виділяємо характеристичний поліном:
![]() .
.
![]() ;
;
![]()
Звідси
![]() .
.
___________________________________________________________________________________________________________________________
Підпис укладача__________________
Підпис голови комісії______________
Дата____________________________
НУХТ, фахова атестаційна комісія ОКР спеціаліст