

8.4. Синтаксическое описание образов
До сих пор в этой главе рассматривались образы—цепочки символов. Если мы хотим получить реальную пользу от структурных свойств объекта в процессе синтаксического распознавания, понятие цепочки должно быть обобщено на двумерный случай. Как отмечалось в § 8.1, в этой главе мы в основном занимаемся двумерными объектами,
Правила
подстановки в грамматиках цепочек
заключаются в простом соединении ')
цепочек с целью формирования новых.
Соединение двумерных структур не
является, однако, простым вопросом.
Читатель может лично в этом убедиться,
рассмотрев разнообразные двумерные
структуры, получающиеся в результате
соединения простых непроизводных
символов | н
—.
Непосредственное решение этого
вопроса связано с заданием положения
двумерных объектов достаточно общим
образом. Рассмотрим, например,
позиционный дескриптор НАД (а,Ь),
обозначающий, что структура,
представленная символом а, расположена
над структурой, представленной Ь,
и позиционный дескриптор СЛЕВА
(а,b),
означающий, что а находится слева от
Ь.
Квадратная структура D,
составленная из непроизводных элементов
| и
—,
описывается при помощи этих дискрипторов
предложением НАД
(—, НАД
(СЛЕВА (|, |),
—)). Основная
трудность при подобном подходе
заключается в определении содержания
дескрипторов НАД и СЛЕВА. Так, например,
предыдущему описанию квадрата
удовлетворяет также и структура |
![]() .
Можно считать этот образ допустимым
или нет, зависит от конкретной ситуации.
Очевидно, однако, что обобщенные
позиционные дескрипторы с трудом
поддаются точному определению. Чаще
всего в таких случаях на взаимоотношения
структур налагаются ограничения. В
частности, разумным ограничением
для дескриптора НАД (а,Ь}
является требование, чтобы хотя бы
часть элемента а
находилась над элементом Ь.
В таком
случае структура |
.
Можно считать этот образ допустимым
или нет, зависит от конкретной ситуации.
Очевидно, однако, что обобщенные
позиционные дескрипторы с трудом
поддаются точному определению. Чаще
всего в таких случаях на взаимоотношения
структур налагаются ограничения. В
частности, разумным ограничением
для дескриптора НАД (а,Ь}
является требование, чтобы хотя бы
часть элемента а
находилась над элементом Ь.
В таком
случае структура |
![]() не будет считаться допустимой, так как
элемент
— не
находится над элементом | | и элемент |
| не
находится над элементом
—.
не будет считаться допустимой, так как
элемент
— не
находится над элементом | | и элемент |
| не
находится над элементом
—.
Можно пойти еще на один шаг дальше по пути ограничения правил соединения и провести значительные упрощения, ведущие к введению грамматических формализмов, необходимых для описания и распознавания объектов. В наиболее удачных работах по синтаксическому распознаванию образов применялась простая
__________________________
1) Частo применяется также термин конкатенация. Между этими двумя терминами есть, однако, разница. Соединение двух объектов означает простое расположение этих объектов рядом при полном сохранении индивидуальных особенностей каждого. Конкатенация в свою очередь предполагает как пространственную перeструктуризацию. так и потерю некоторых существенных особенностей объектов. Важное различие при этом заключается в том, что всякая конкатенации объектов является также объектом, тогда как соединение объектов может (хотя и необязательно) быть рассмотрено как единый объект. Так как при описании образов способность сохранять индивидуальность зачастую играет решающую роль, в этой главе мы будем пользоваться термином соединение. Читатель тем w менее должен иметь в виду, что в литературе эти дна термина используются на равных началах.
346


![]()
![]()
![]()

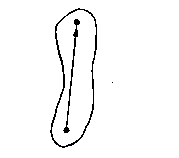
Рис. 8.2 Сведение задачи соединения объектов к одномерному случаю посредством обобщенного представления объектов ориентированными отрезками прямых, а—выборочные образы; б—характерные действенные правила соединения обобщенных образов.
способ. Как показано на рис. 8.2, а, две выделенные точки в этой системе интерпретируются как «головной» и «хвостовой» концы стрелы. Типичные допустимые правила соединения для данной системы показаны на рис. 8,2,6. Совершенно очевидно, что такой подход эффективно сводит задачу двумерного соединения к эквивалентной задаче действий с цепочками, поддающейся решению с помощью обыкновенной цепочечной грамматики, рассмотренной выше.
Для описания двумерных отношений используется и другая полезная методика, основывающаяся на древовидных структурах. Дерево—это конечное множество Т, состоящее из одного или более узлов, таких, что 1) существует один выделенный узел, называемый корнем дерева, и 2) остальные узлы (исключая корень) разделены па m>=0 непересекающихся множеств Т1, Т2 ..., Тт, каждое из которых в свою очередь является деревом. Деревья Т1, Т2 ..., Тт, называются поддеревьями корня, Число поддеревьев узла называется степенью этого узла. Узел с нулевой степенью называется листом, а узел с наиболее высокой степенью — узлом ветви. Наконец, представление образа в виде дерева называется деревом образа




Рис. 8.3. Представление образов в виде деревьев.
Использование деревьев для описания многомерных структур—довольно простая процедура. В сущности, любая иерархически упорядоченная схема ведет к представлению объекта в виде дерева. Два примера, иллюстрирующие это обстоятельство, приведены на рис. 8.3. На рис. 8.3, а упорядочение состоит в группировке областей, причем область Ь находится в области а, в свою очередь находящейся в области r. Обозначив корень дерева символом r, получаем древовидную структуру (рис, 8.3.6), естественно вытекающую из схемы упорядочения, приведенной выше. Второй пример показан на рис, 8.3, в, В этом случае получившийся двумерный объект определяется связями между различными компонентами схемы. На рис. 8-3, г изображено соответствующее дерево. Отметим, что каждый узел дерева представляет узел схемы и что корень дерева образа произвольно определяется как крайний левый верхний узел образа.