

1.3.3.2 Алгебраический критерий устойчивости (аналог критерия Гурвица)
Для оценки устойчивости импульсных систем управления используют билинейное или -преобразование, посредством которого окружность единичного радиуса (рис. 1.17) отображается на мнимую плоскость комплексной величины (рис.1.19). Преобразование осуществляют заменой оператора z оператором w согласно равенству
![]() .
(1.11)
.
(1.11)
Названную замену операторов часто в англоязычной литературе называют преобразованием Тастина (Tustin). Характеристическое уравнение САУ (1.10) в результате подстановки в него (1.11) и приведения подобных членов приобретает следующий вид
![]() (1.12)
(1.12)
Например, при m=1 характеристическое уравнение САУ имеет простейший вид
![]()
где
![]() и
и
![]() .
Это уравнение можно теперь исследовать
с помощью критерия Гурвица. Из теории
непрерывных систем известны необходимые
и достаточные условия устойчивости
САУ первого порядка в виде двух неравенств
.
Это уравнение можно теперь исследовать
с помощью критерия Гурвица. Из теории
непрерывных систем известны необходимые
и достаточные условия устойчивости
САУ первого порядка в виде двух неравенств
![]() и
и
![]()
При m=2 условия
устойчивости САУ второго порядка
выражаются тремя неравенствами
![]() ;
;
![]() ;
;
![]() и т.д.
и т.д.
1.3.3.3 Алгебраический критерий Шур-Кона
Критерий Шур-Кона также позволяет оценить устойчивость замкнутой импульсной САУ по ее характеристическому уравнению (1.10). Для этого формируют следующую последовательность определителей, составленных из коэффициентов характеристического уравнения
![]() ,
,
 ;
;
 ,
,
где k=1,2…m; m-порядок характеристического уравнения.
Для того, чтобы импульсная САУ была
устойчивой, все корни характеристического
уравнения
должны лежать внутри круга единичного
радиуса. Это означает, что количество
перемен знака в последовательности
определителей 1,![]() ,
,
![]() ,
…,
,
…,
![]() должно
быть равно m,
где m-порядок характеристического
уравнения. Критерий устойчивости может
быть сформулирован иначе следующим
образом:
должно
быть равно m,
где m-порядок характеристического
уравнения. Критерий устойчивости может
быть сформулирован иначе следующим
образом:
![]() ,
если k – нечетное
число;
,
если k – нечетное
число;
![]() ,
если k- четное.
,
если k- четное.
Например, при m=2 для последовательности определителей 1, и должны выполняться следующие неравенства:
![]() ;
;
 ,
,
указывающие на необходимость двух
перемен знака для того, чтобы два корня
характеристического уравнения
![]() лежали внутри круга единичного радиуса.
лежали внутри круга единичного радиуса.
1.3.4 Аналог критерия Михайлова
Под аналогом критерия Михайлова понимают совокупность признаков устойчивости импульсной САУ, которые находят в результате исследования характеристического полинома замкнутой системы D(z), см. уравнение (1.10). Порядок анализа аналогичен методике исследования непрерывной САУ.
Более простой считают графическую
интерпретацию критерия с построением
годографа Михайлова. При этом сначала
в характеристическом полиноме D(z)
производят замену оператора z
на
![]() ,
где
,
где
![]() -угловая
частота входного сигнала. В результате
чего получают уравнение годографа
Михайлова.
-угловая
частота входного сигнала. В результате
чего получают уравнение годографа
Михайлова.
![]() .
.
Затем это уравнение преобразуют и записывают в алгебраическом или показательном виде для построения годографа. С использованием декартовых координат уравнение приобретает алгебраический вид
![]()
Поскольку ЧХ импульсных систем являются
периодическими функциями частоты,
годограф Михайлова строят в диапазоне
частот
![]() .
На рисунке 1.19 показан примерный вид
годографов 1и 2 импульсной САУ второго
(m=2) и четвертого (m=4)
порядков соответственно.
.
На рисунке 1.19 показан примерный вид
годографов 1и 2 импульсной САУ второго
(m=2) и четвертого (m=4)
порядков соответственно.
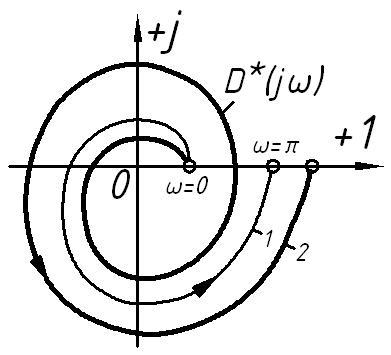 Критерий устойчивости Михайлова
формулируют следующим образом: для
устойчивости импульсной САУ необходимо,
чтобы годограф
Критерий устойчивости Михайлова
формулируют следующим образом: для
устойчивости импульсной САУ необходимо,
чтобы годограф![]() начинался (
начинался (![]() )
на положительной действительной полуоси
комплексной q- плоскости
и охватывал начало координат,
последовательно проходя 2m
квадрантов,
)
на положительной действительной полуоси
комплексной q- плоскости
и охватывал начало координат,
последовательно проходя 2m
квадрантов,
m-порядок системы управления.
Таким образом, изображенные на
рисунке 1.19 годографы принадлежат
устойчивым САУ. Действительно, годограф
1 проходит через четыре квадранта
(2m=4),а годограф 2- через
восемь (2m=8). В отличии
от непрерывных систем годограф импульсной
САУ не уходит в бесконечность, а
заканчивается на вещественной полуоси
![]() ,
проходя при этом в два раза больше
квадрантов.
,
проходя при этом в два раза больше
квадрантов.
Рисунок 1.19