

2.2 Методы линеаризации нелинейных моделей
Методы линеаризации, основанные
на разложении функции
![]() в ряд Тейлора, применяют в тех случаях,
когда эта функция хотя бы один раз
дифференцируема или аппроксимируется
касательной с малой погрешностью в
некоторой окрестности рабочей точки.
Такие характеристики называют слабо
нелинейными. Существует целый класс
нелинейностей, для которых оба названных
выше условия не выполняются. Обычно
такие характеристики называют существенно
нелинейными. К ним относят: ступенчатые,
кусочно-линейные, степенные и другие.
Математическое описание таких
нелинейностей выполняют с помощью
эквивалентных ПФ, зависящих от
коэффициентов линеаризации. Если на
вход НЭ поступает гармонический сигнал,
то метод линеаризации называют
гармоническим ( см.2.4.3 ). Если действует
случайный входной сигнал, то метод
линеаризации называют статистическим.
в ряд Тейлора, применяют в тех случаях,
когда эта функция хотя бы один раз
дифференцируема или аппроксимируется
касательной с малой погрешностью в
некоторой окрестности рабочей точки.
Такие характеристики называют слабо
нелинейными. Существует целый класс
нелинейностей, для которых оба названных
выше условия не выполняются. Обычно
такие характеристики называют существенно
нелинейными. К ним относят: ступенчатые,
кусочно-линейные, степенные и другие.
Математическое описание таких
нелинейностей выполняют с помощью
эквивалентных ПФ, зависящих от
коэффициентов линеаризации. Если на
вход НЭ поступает гармонический сигнал,
то метод линеаризации называют
гармоническим ( см.2.4.3 ). Если действует
случайный входной сигнал, то метод
линеаризации называют статистическим.
2.3 Анализ поведения системы управления на фазовой плоскости ( метод фазовых траекторий )
2.3.1 Основные понятия
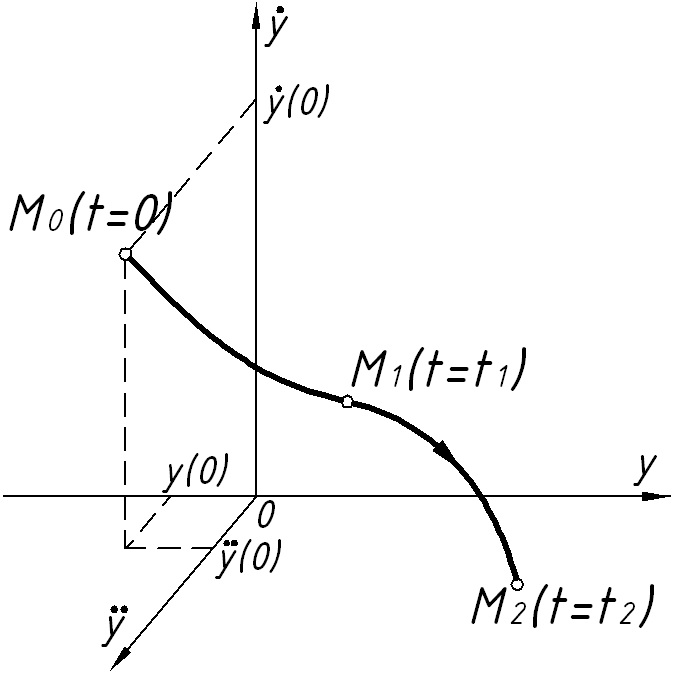 Метод основан на понятии о фазовом
пространстве. Фазовым пространством
называют многомерное пространство,
координатами которого являются какая-либо
величина, скорость её изменения и
ускорения соответствующих порядков
(рис. 2.6). При исследовании САУ названной
величиной является выходная величина
системы. Если САУ описывается
дифференциальным уравнением n-го
порядка, то её состояние связывают с
положением (фазой) некоторой точки М,
которую называют изображающей точкой,
в n-мерном пространстве.
При изменении состояния САУ меняется
положение изображающей точки в фазовом
пространстве. Траекторию этого перемещения
называют фазовой траекторией. При
этом фазовая траектория не дает
представления о протекании переходного
процесса во времени, а служит лишь
качественной характеристикой этого
процесса. Для САУ второго порядка фазовое
пространство двумерное, т.е.
Метод основан на понятии о фазовом
пространстве. Фазовым пространством
называют многомерное пространство,
координатами которого являются какая-либо
величина, скорость её изменения и
ускорения соответствующих порядков
(рис. 2.6). При исследовании САУ названной
величиной является выходная величина
системы. Если САУ описывается
дифференциальным уравнением n-го
порядка, то её состояние связывают с
положением (фазой) некоторой точки М,
которую называют изображающей точкой,
в n-мерном пространстве.
При изменении состояния САУ меняется
положение изображающей точки в фазовом
пространстве. Траекторию этого перемещения
называют фазовой траекторией. При
этом фазовая траектория не дает
представления о протекании переходного
процесса во времени, а служит лишь
качественной характеристикой этого
процесса. Для САУ второго порядка фазовое
пространство двумерное, т.е.
Рисунок 2.6 представляет собой фазовую плоскость. В этом
случае абсцисса –выходная величина![]() ,
ордината –скорость изменения последней
,
ордината –скорость изменения последней![]() или ошибка регулирования
и
скорость ее изменения
или ошибка регулирования
и
скорость ее изменения![]() .
.
Начальное положение изображающей точки определяется начальными условиями (НУ) свободного движения САУ. При равновесии системы все производные рассматриваемой переменной равны нулю; соответствующие этому состоянию точки фазового пространства называют особыми. Совокупность фазовых траекторий для всех возможных начальных отклонений вместе с особыми траекториями и точками называют фазовым портретом системы. Хотя метод фазовой плоскости разработан для исследования нелинейных САУ, возможно построение фазовых траекторий линейных звеньев и систем. На рис.2.7-2.2 показаны фазовые портреты линейных К-звеньев при различных значениях коэффициента демпфирования ξ . Соответственно диферинциальное уравнение имеет вид
![]()
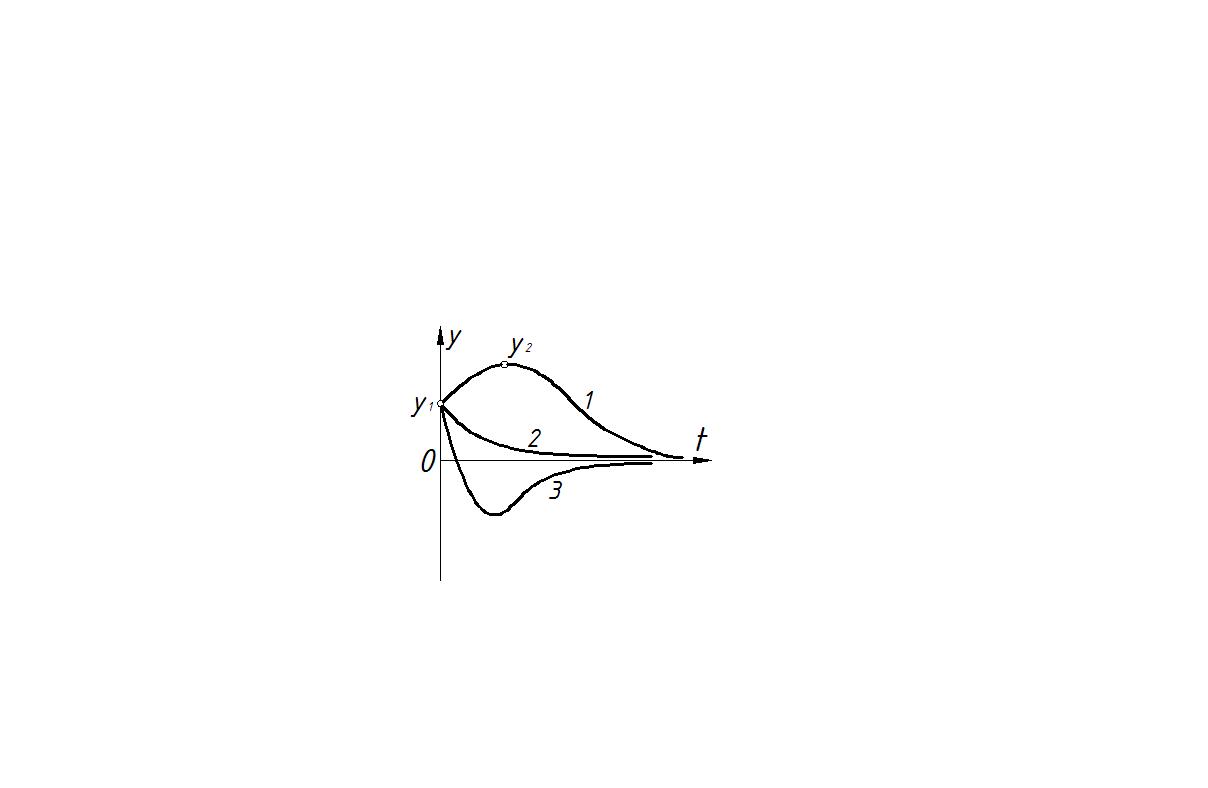
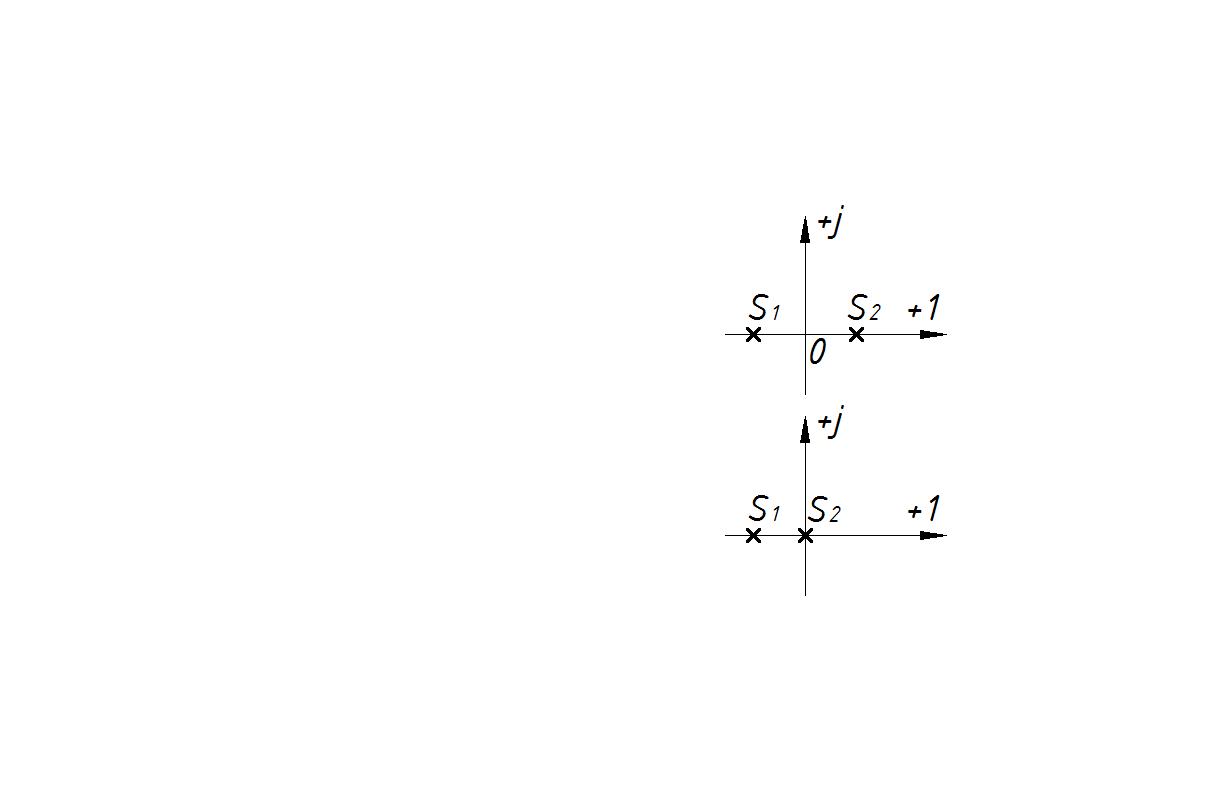
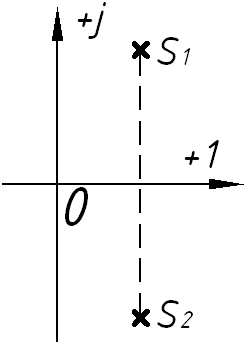
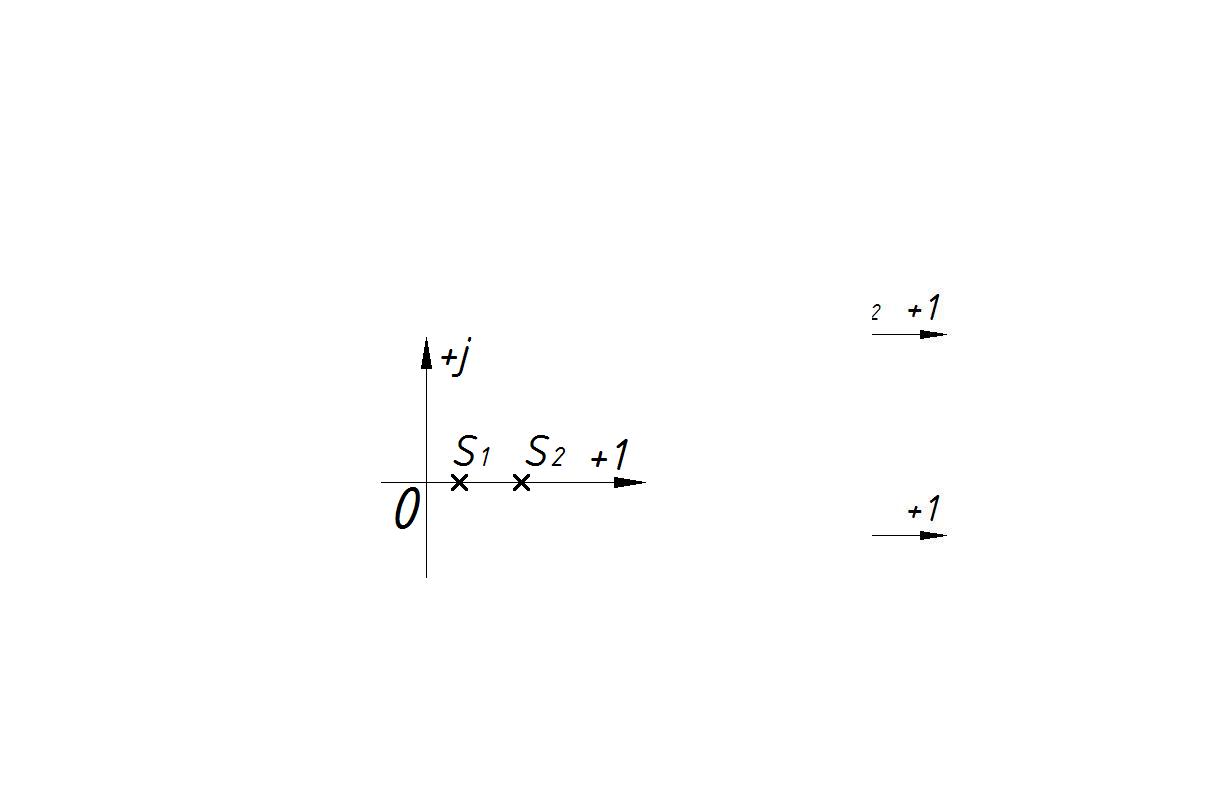
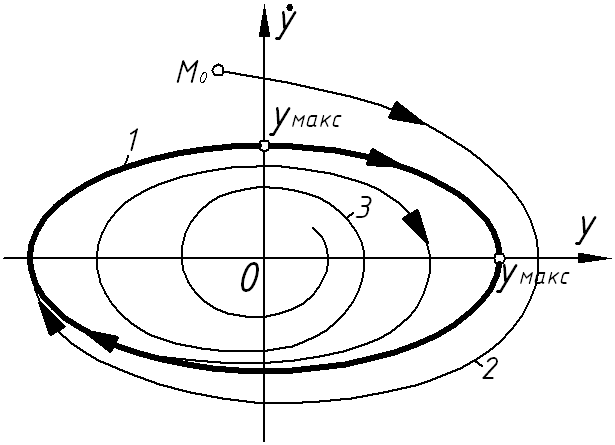
В зависимости от вида фазовой траектории особая точка плоскости может быть: фокусом (рис.2.7 и рис.2.11), узлом ( рис.2.8 и 2.2), центром (рис.2.9) и седлом (рис.2.10). Центр является точкой безразличного равновесия. Фокус и узел могут характеризовать как устойчивые (рис.2.7 и рис.2.8), так и неустойчивые процессы (рис.2.11и рис.2.12). Фазовые траектории устойчивых звеньев и систем стягиваются к началу координатам, неустойчивых – расходятся в бесконечность. Незатухающим колебаниям соответствует замкнутая траектория ( рис.2.9 ). Такие траектории называют предельными циклами. Они бывают устойчивыми и неустойчивыми. Устойчивый предельный цикл 1 ( рис.2.25 ) соответствует автоколебаниям. Он
выделяется тем, что соседние фазовые траектории 2 и 3 (рис.2.25) с обеих сторон от устойчивого предельного цикла наматываются на него.
Для фазового портрета нелинейного звена с разрывной статической характеристикой характерно наличие линий переключения, которыми фазовая плоскость разделяется на ряд областей с различными фазовыми траекториями. Нелинейными САУ такого типа являются релейные системы и САУ с НЭ типа гистерезиса, зоны нечувствительности, зазора и сухого трения. Характеристики таких НЭ могут быть разбиты на отдельные участки, каждый из которых описывается собственным линейным уравнением. Также можно построить фазовые траектории отдельно для каждого участка, а затем соединить
Таблица 2
Фазовый портрет |
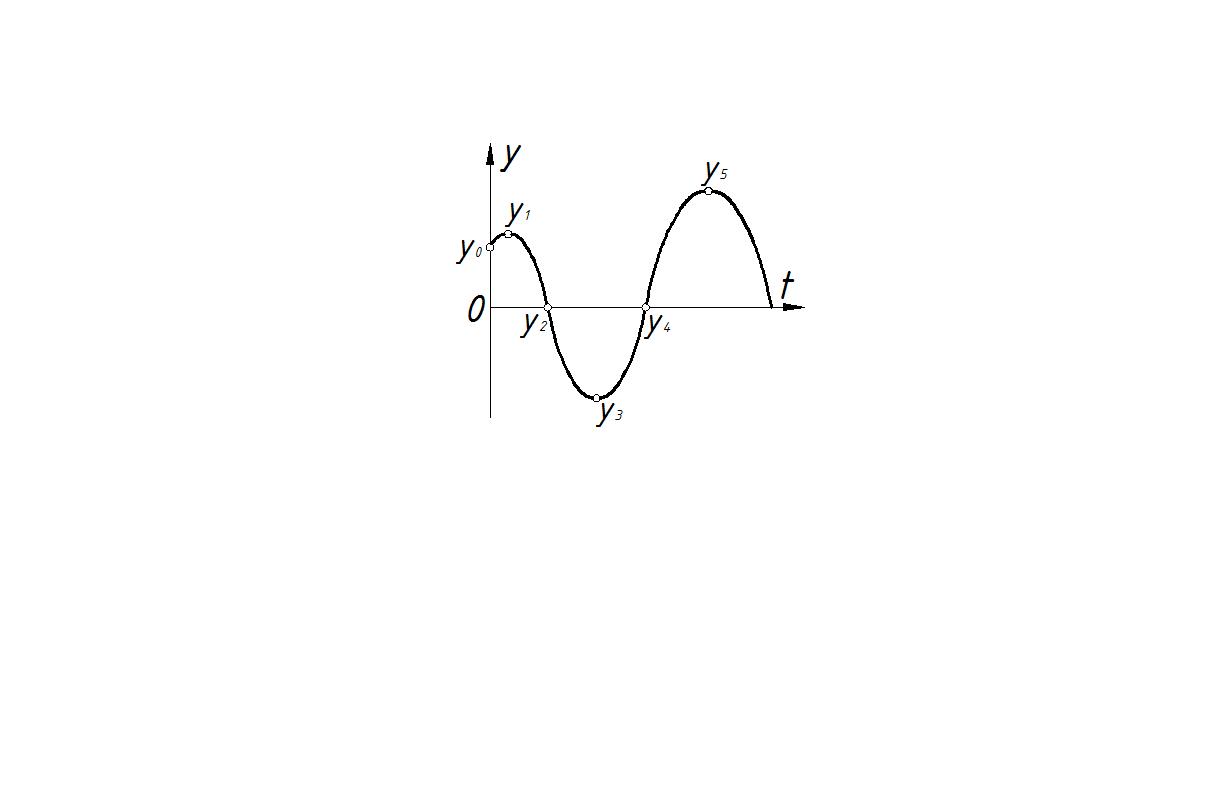
Переходная характеристика |
Диаграмма полюсов |
|
Рисунок 2.13 |
Рисунок 2.19 |
|
Рисунок 2.14 |
Р |
Р |
Рисунок 2.1 |
Р |
Рисунок 2.10 |
Рисунок 2.17 |
Р |
Рисунок 2.11 |
Рисунок 2.17 |
Р |
Р |
Рисунок 2.18 |
Рисунок 2.24 |
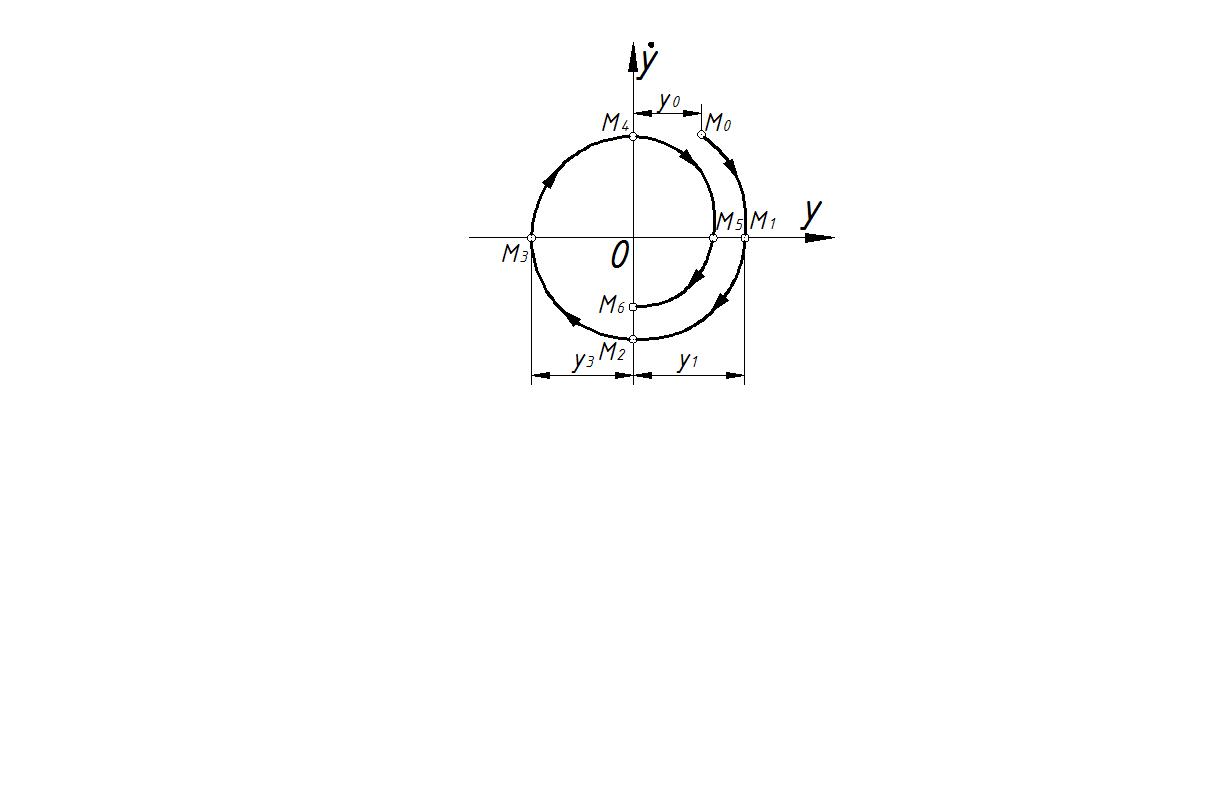 Рисунок 2.7
Рисунок 2.7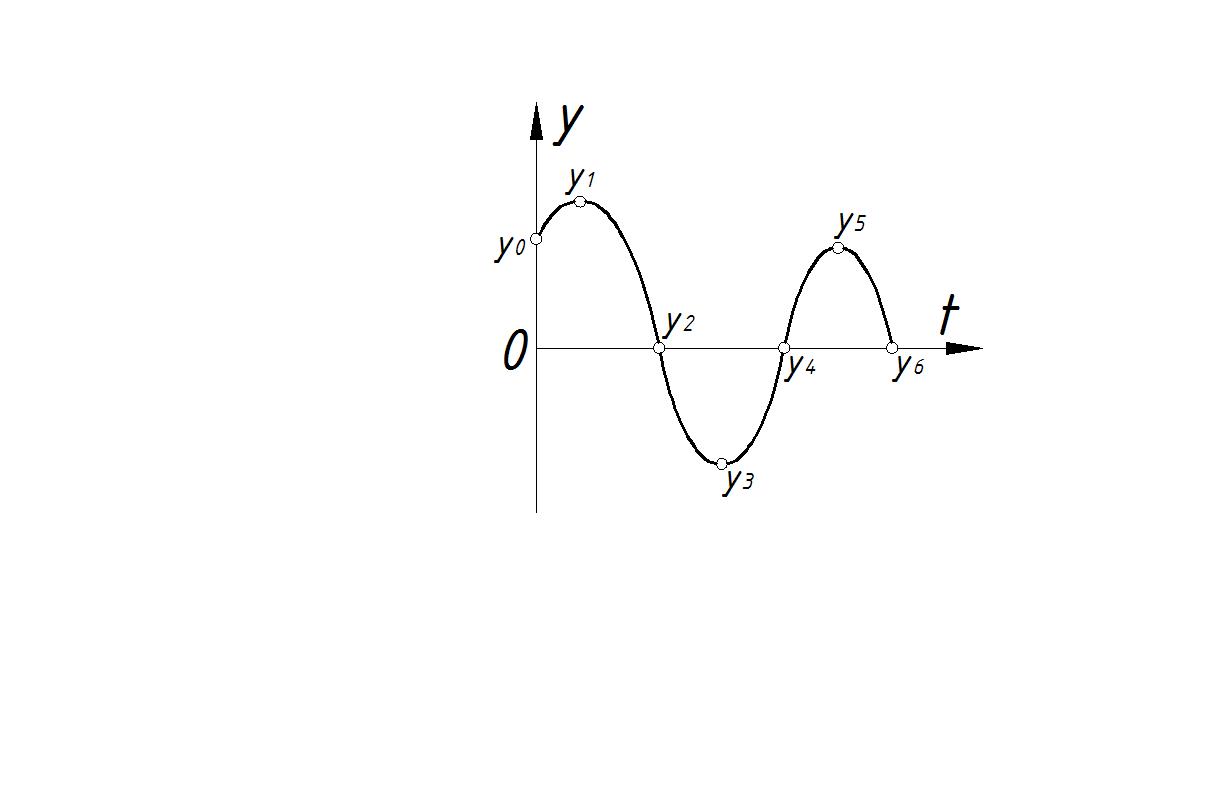
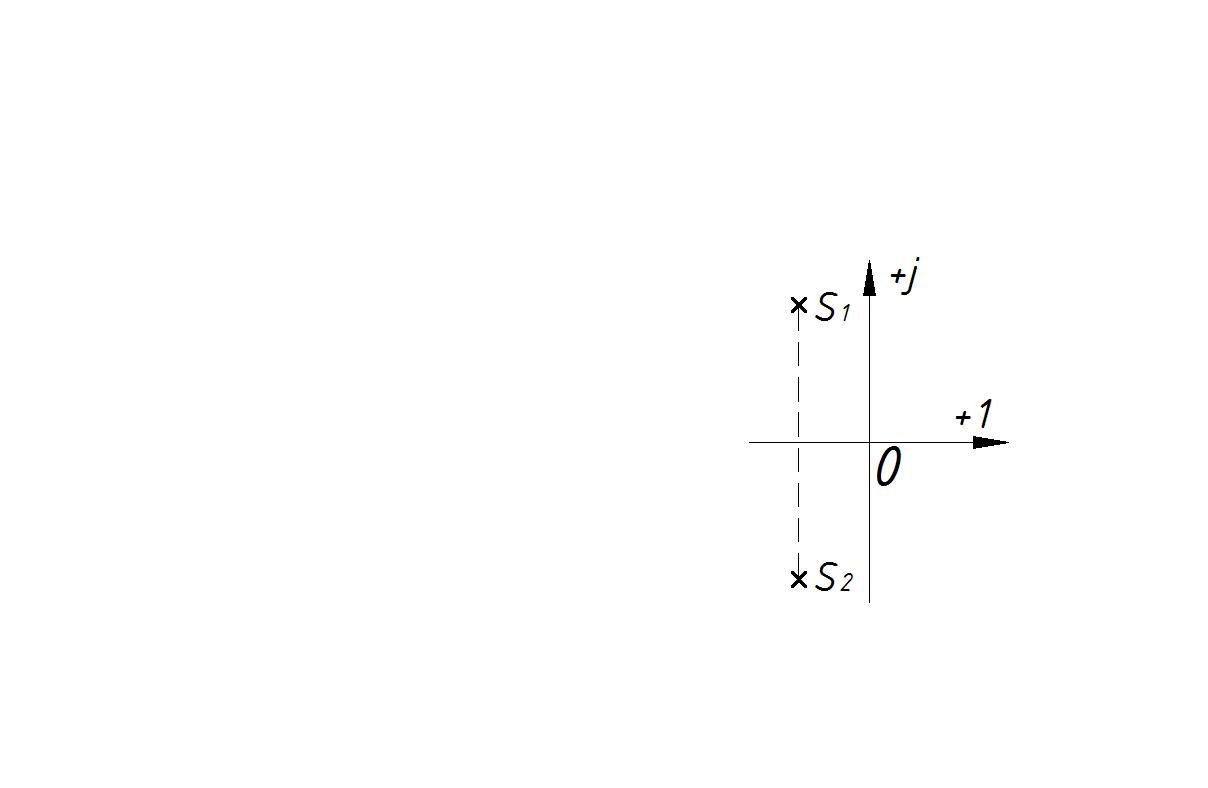
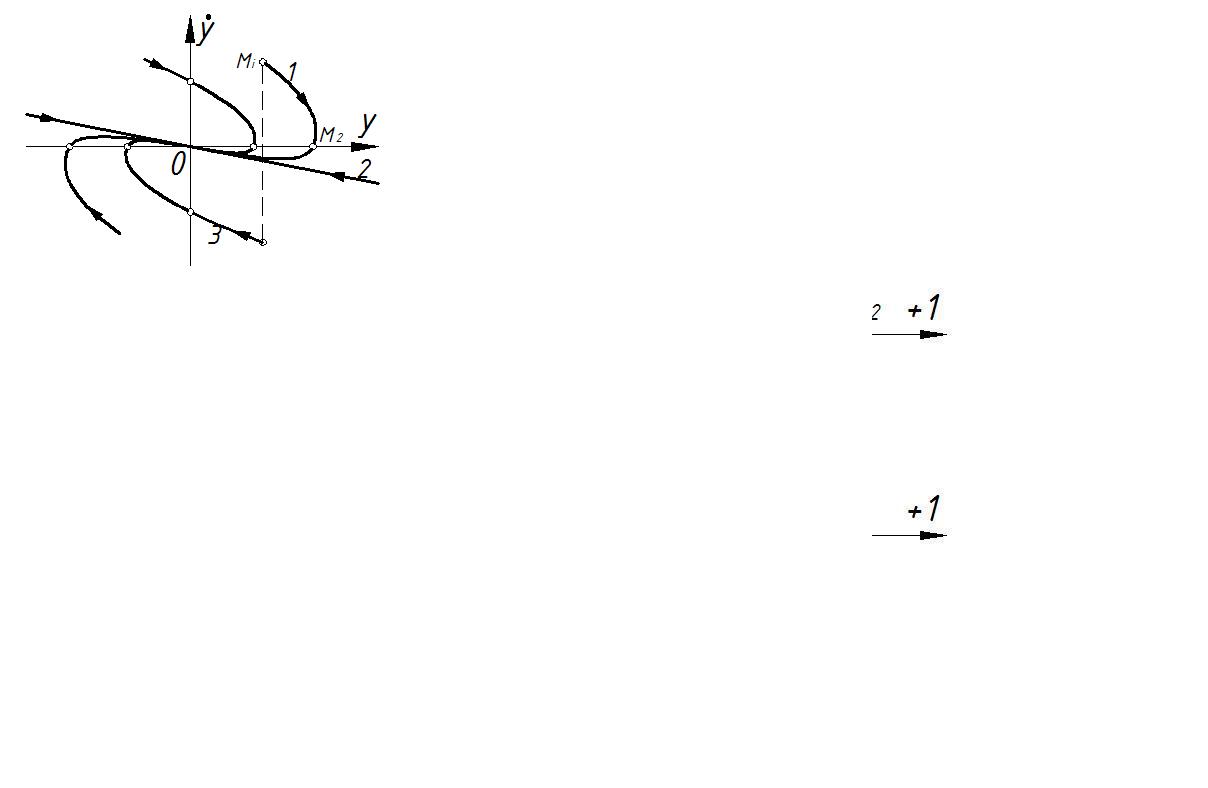 Рисунок 2.8
Рисунок 2.8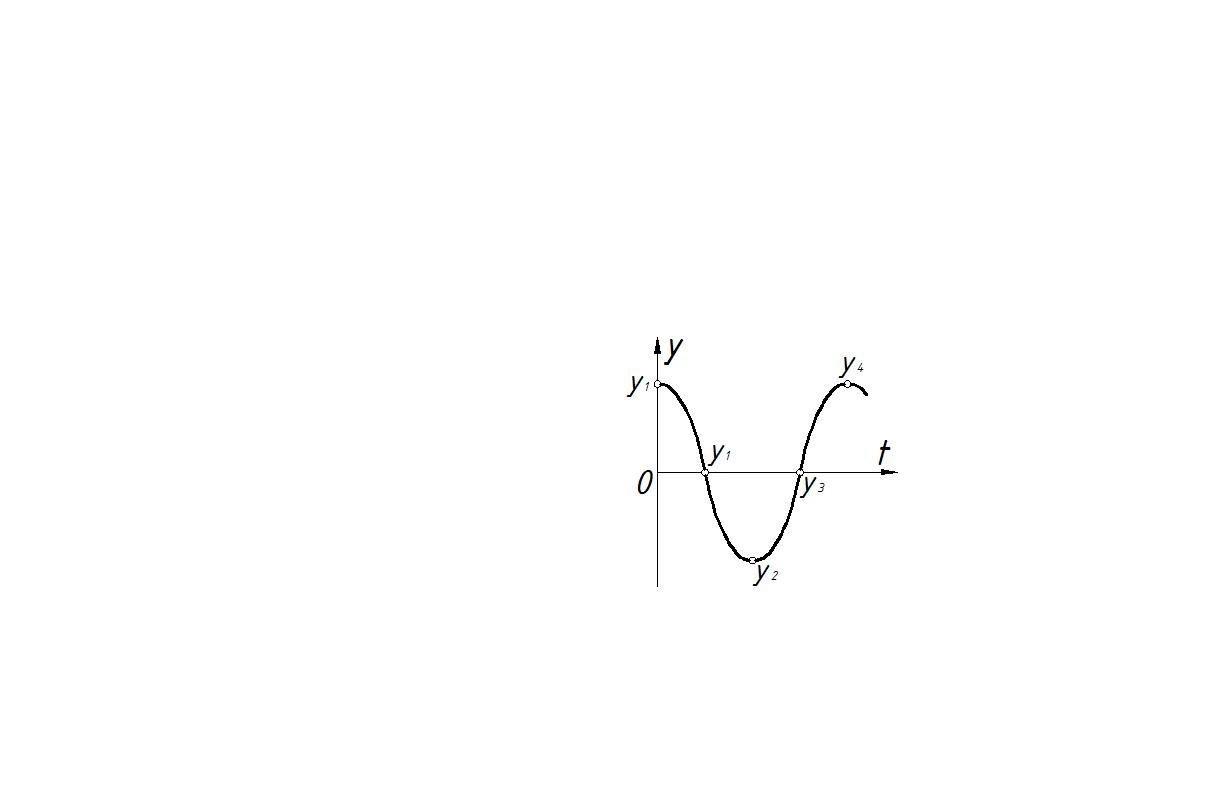
 исунок
2.20
исунок
2.20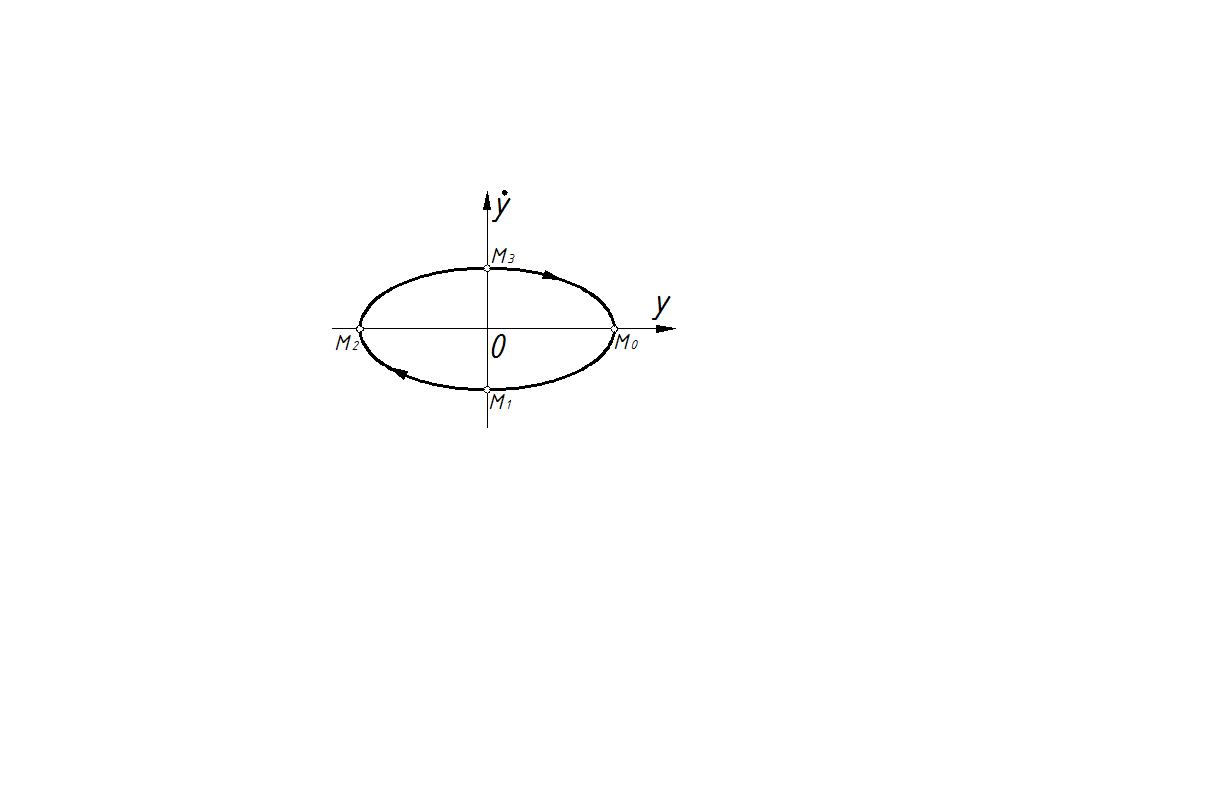 исунок
2.9
исунок
2.9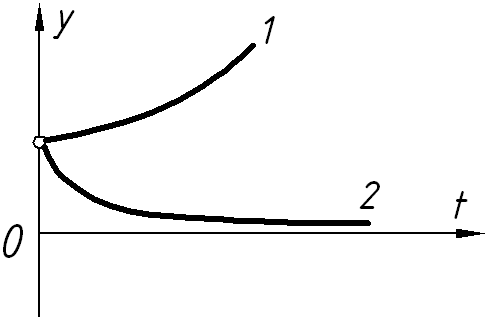 6
6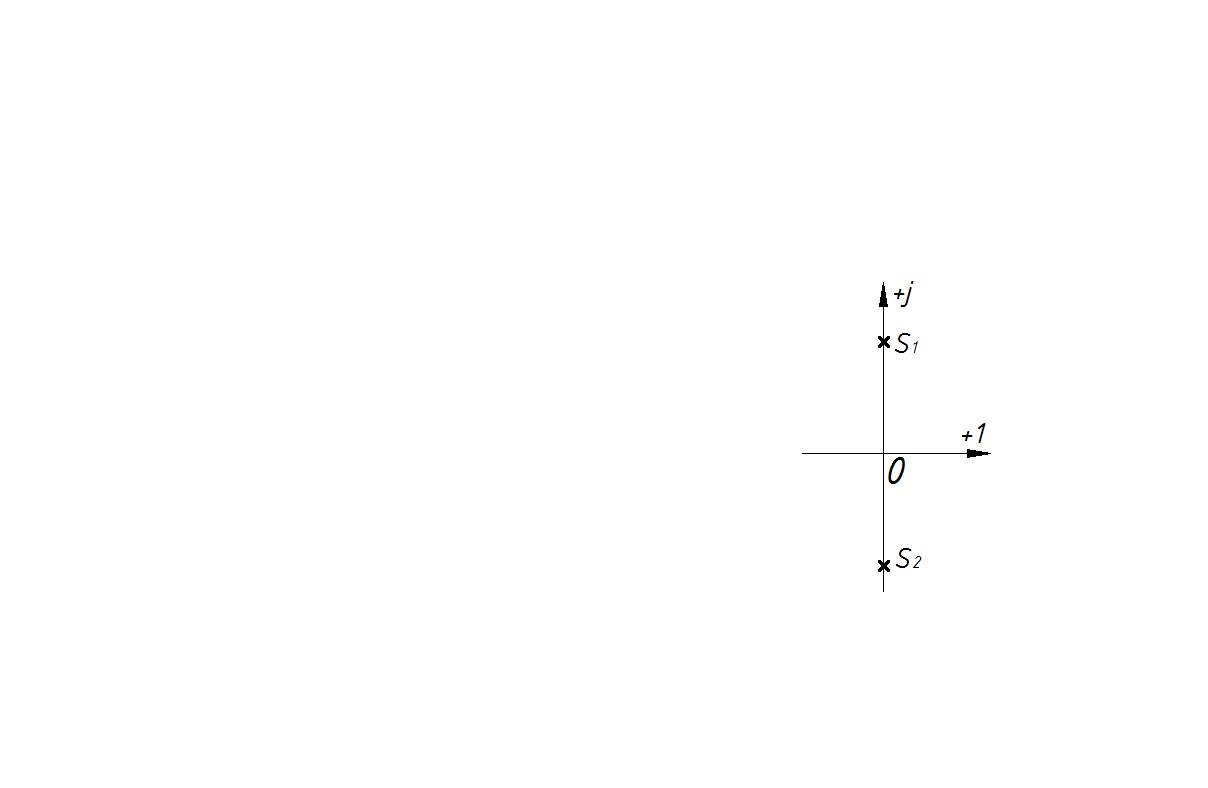 исунок
2.21
исунок
2.21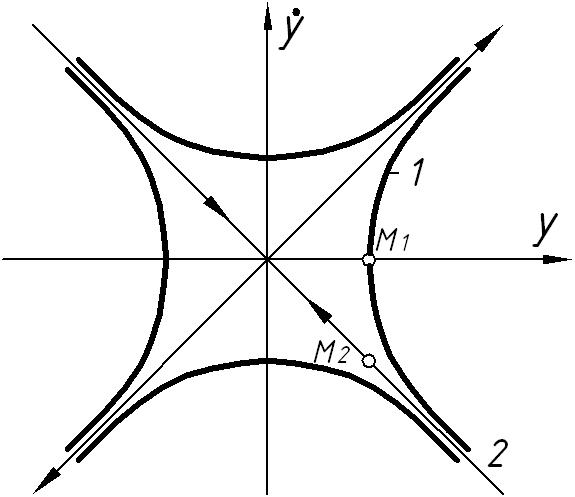
 исунок
2.22
исунок
2.22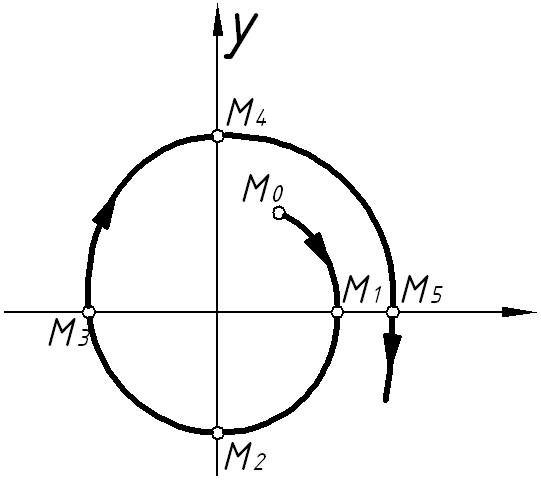
 исунок
2.23
исунок
2.23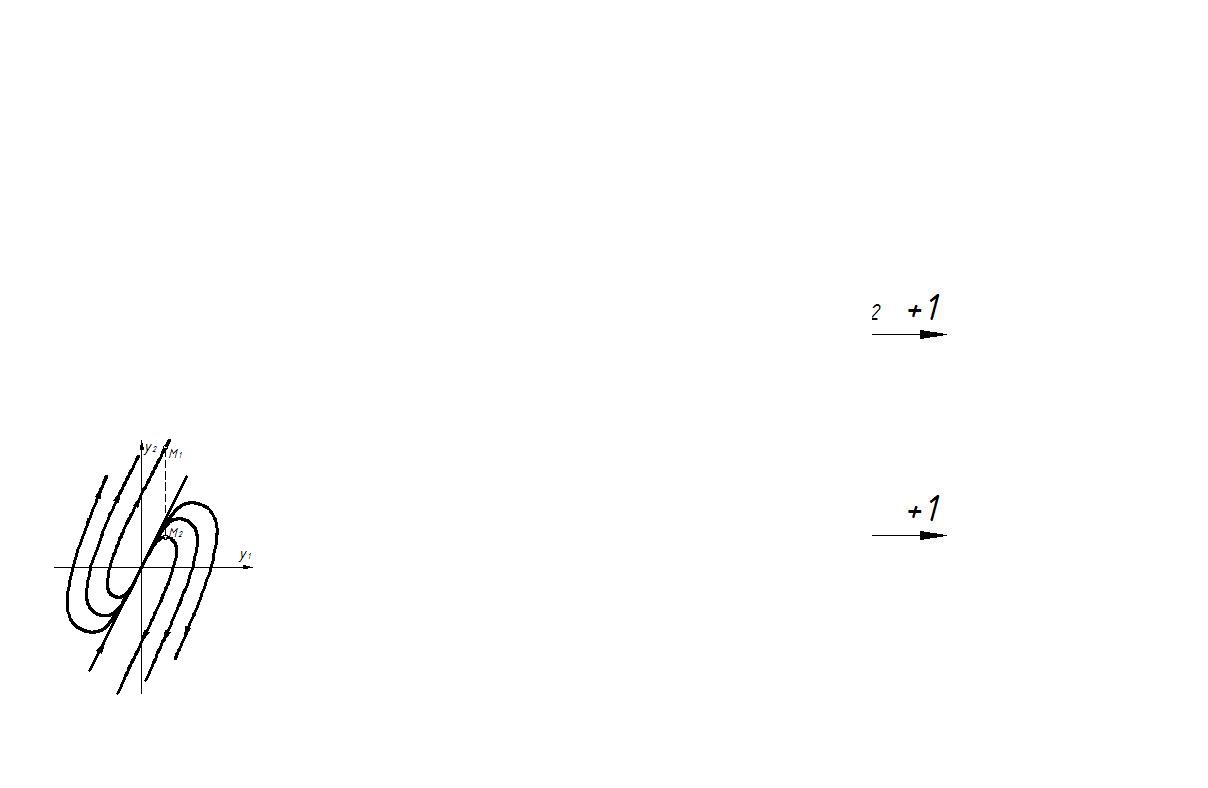 исунок
2.12
исунок
2.12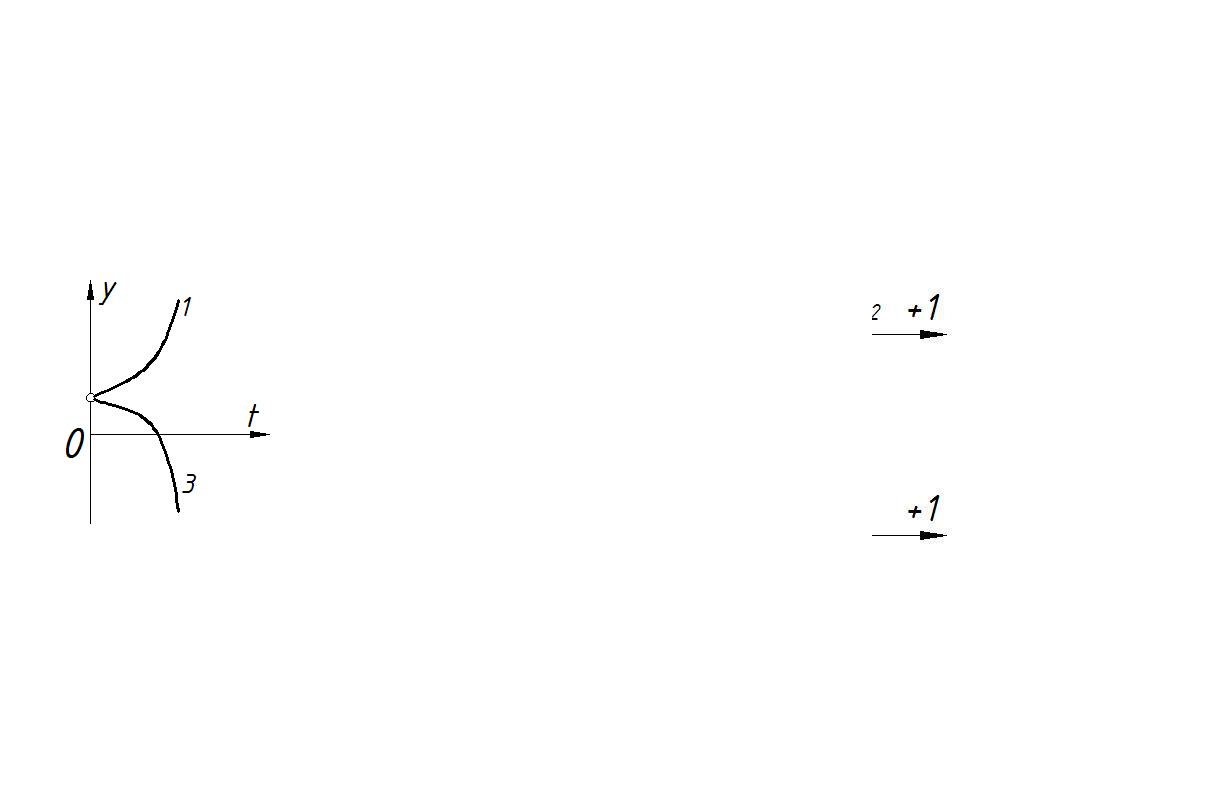
 (
припасовать ) их друг с другом в
местах стыкования ( в линиях переключения
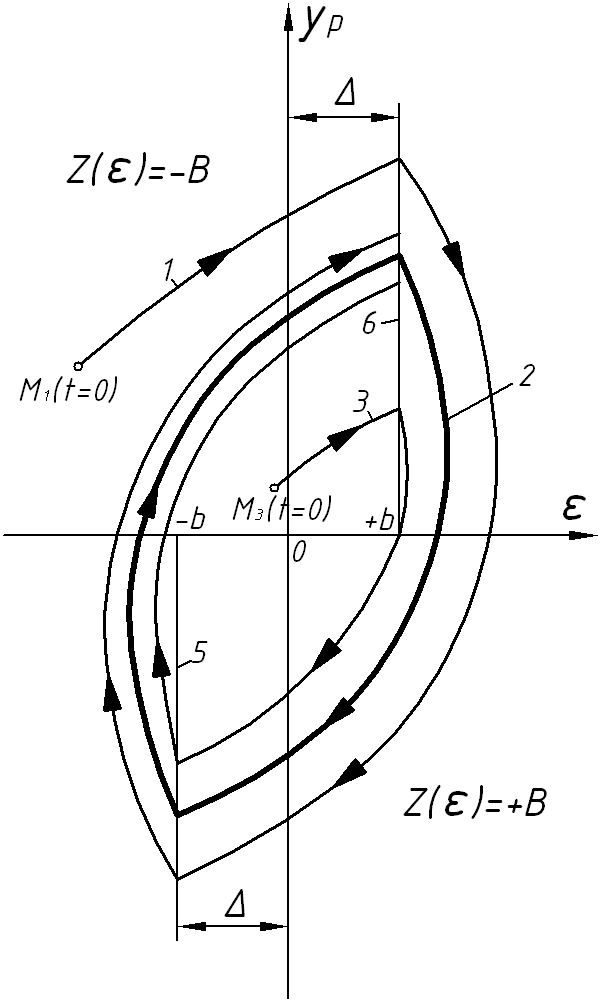
режимов). На рис.2.26 показан фазовый
портрет релейной САУ и НЭ, имеющии
релейную характеристику с гистерезисом
( рис.1.22 ). Для простоты портрет изображен
состоящим только из двух фазовых
траекторий 1 и 3, а также особой траектории
2. Отличие первых двух друг от друга
обусловлены различными НУ, см. точки М1
и М3. Особая траектория 2 представляет
собой устойчивый предельный цикл. В
рассматриваемом
(
припасовать ) их друг с другом в
местах стыкования ( в линиях переключения
режимов). На рис.2.26 показан фазовый
портрет релейной САУ и НЭ, имеющии
релейную характеристику с гистерезисом
( рис.1.22 ). Для простоты портрет изображен
состоящим только из двух фазовых
траекторий 1 и 3, а также особой траектории
2. Отличие первых двух друг от друга
обусловлены различными НУ, см. точки М1
и М3. Особая траектория 2 представляет
собой устойчивый предельный цикл. В
рассматриваемом
Рисунок 2.25 примере линии переключения режимов являются
вертикальными прямыми линиями 5 и 6, уравнения
которых
![]()
Рисунок 2.26