

1.3.2.6 Передаточные функции разомкнутых и замкнутых импульсных сау
Математическая модель импульсной САУ с АИМ, структурная схема которой показана на рисунке 1.10, является непрерывно-дискретной, т.к. содержит непрерывные и дискретные функции. Z-преобразование последних в конечном итоге приводит к операторному уравнению
![]() или
или
![]() .
(1.5)
.
(1.5)
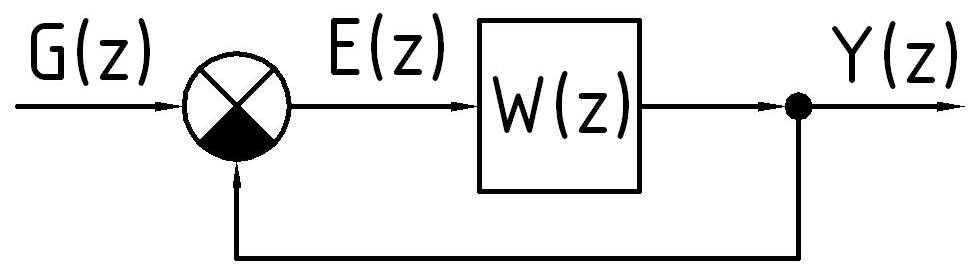 Оператор W(z)
называют z-передаточной
функцией разомкнутой САУ. Полученная
ПФ представляет собой отношение
z-преобразования
выходной величины Y(z)
к
Оператор W(z)
называют z-передаточной
функцией разомкнутой САУ. Полученная
ПФ представляет собой отношение
z-преобразования
выходной величины Y(z)
к
Z-преобразованию входной Е(z). Структурная схема САУ изображена на рисунке 1.13.
Рисунок 1.13
Основную Z-передаточную функцию определяют по формуле замыкания
![]() . (1.6)
. (1.6)
Главная особенность анализа
импульсных САУ с АИМ состоит в определении
Z-передаточной
функции W(z)
по известной ПФ приведённой линейной
части W(s).
Последовательность отыскания
Z-передаточной функции
импульсной САУ W(z)
следующая. Если известна ПФ НЧ W(s),
сначала определяют с помощью обратного
преобразования Лапласа весовую функцию
(импульсную)
![]() (t)
непрерывной части САУ
(t)
непрерывной части САУ
![]() .
.
Затем по этой функции определяют
соответствующую ей решетчатую
весовую функцию
![]() ,
по которой, используя z-преобразование,
находят искомую z-передаточную
функцию
,
по которой, используя z-преобразование,
находят искомую z-передаточную
функцию
![]() .
.
Как правило, в расчётную практику
вводят оператор![]() ,
который каждой функции
,
который каждой функции
![]() ставит в соответствие функцию
таким образом, что
ставит в соответствие функцию
таким образом, что
![]() .
.
Оператор соответствует трем последовательным операциям: обратному преобразованию Лапласа, квантованию по времени и Z-преобразованию. Используя этот оператор, Z-передаточную функцию определяют следующим образом
![]() . (1.7)
. (1.7)
Например, в случае экстраполятора нулевого порядка (рис.1.12)
![]() . (1.8)
. (1.8)
При этом необходимо учитывать, что![]() .Это
неравенство часто записывают иначе
.Это
неравенство часто записывают иначе![]() .
.
Построение переходной характеристики импульсной сау
Реакцию импульсной САУ на какое-либо управляющее воздействие определяют по формуле
![]()
Если необходимо найти переходную характеристику системы, то сначала отыскивают Z- изображение G(z) входного воздействия, оригинал которого g(t)=1(t). Согласно таблице1
![]()
В этом случае Z-изображение переходной функции импульсной САУ
![]()
Д ля
того, чтобы изобразить переходный
процесс САУ, необходимо найти
соответствующую изображению Y(z)
решетчатую функцию
ля
того, чтобы изобразить переходный
процесс САУ, необходимо найти
соответствующую изображению Y(z)
решетчатую функцию
![]() обратным Z-преобразованием
обратным Z-преобразованием
![]()
Предварительно Z-изображение Y(z) приводят к табличному виду, а затем с помощью таблицы 1 рассчитывают оригинал названной функции . Полученное выражение позволяет при необходимости построить искомую переходную характеристику системы графически. Пример типичной переходной характеристики импульсной САУ с АИМ изображен на рис.1.14. Ступенчатая форма
Рисунок 1.14 кривой переходного процесса обусловлена исключительно тем, что исследование выполнено на дискретной модели системы с помощью Z- преобразования. При этом за действительные принимают значения функции в моменты квантования 0, 1Т, 2Т и т.д. На рис.1.14 названные значения выделены точками.