

1 Линейные дискретные модели систем управления
Основные понятия о дискретных сау
САУ дискретного действия ( дискретной САУ ) называют систему, в которой хотя бы одна величина представляет собой дискретный сигнал. Дискретный сигнал изменяется во времени дискретно, скачками ( рис. 1.2-1.4 ).
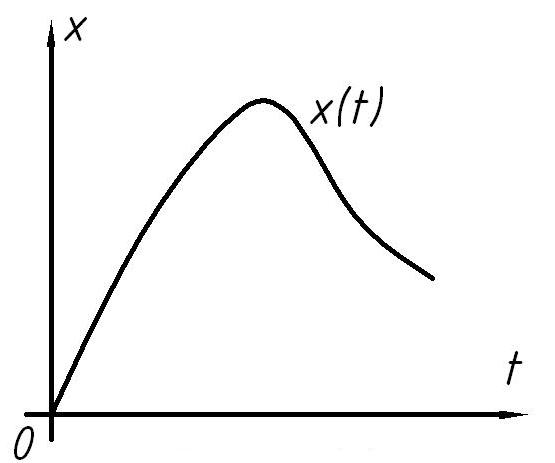 Преобразование непрерывного сигнала
x(t)
в дискретный y(t)
(рис.1.1) называют квантованием
сигнала. Различают два основных вида
квантования: по уровню ( рис. 1.2 ) и
по времени ( рис. 1.3 ). Сигнал,
квантованный по уровню, может принимать
только вполне определённые дискретные
значения, называемые уровнями и
показанными на рис. 1.2 горизонтальными
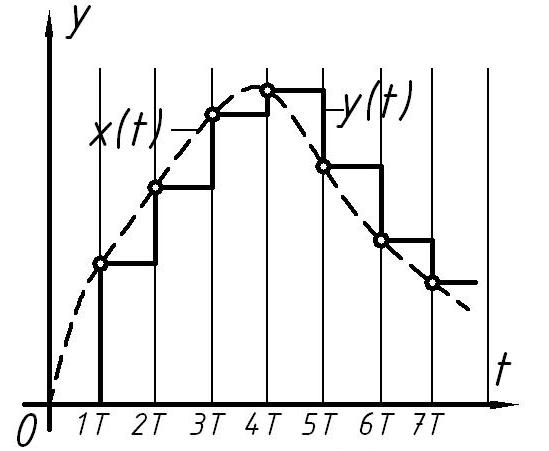
линиями. Сигнал, квантованный по времени,
изменяется скачком в фиксированные
моменты времени, показанные на рис. 1.3
Преобразование непрерывного сигнала
x(t)
в дискретный y(t)
(рис.1.1) называют квантованием
сигнала. Различают два основных вида
квантования: по уровню ( рис. 1.2 ) и
по времени ( рис. 1.3 ). Сигнал,
квантованный по уровню, может принимать
только вполне определённые дискретные
значения, называемые уровнями и
показанными на рис. 1.2 горизонтальными
линиями. Сигнал, квантованный по времени,
изменяется скачком в фиксированные
моменты времени, показанные на рис. 1.3
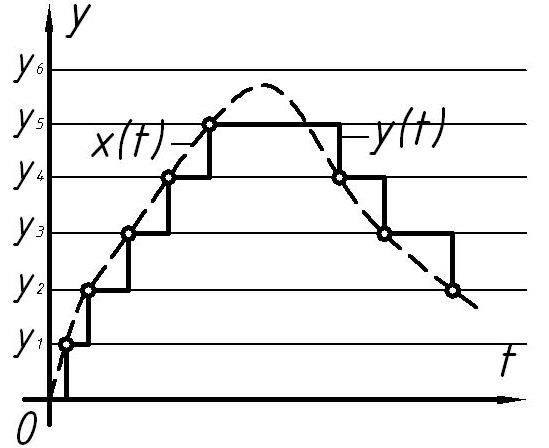 Рисунок 1.1 вертикальными
линиями. На рис. 1.4 изображён сигнал,
квантованный по уровню и по времени.
Рисунок 1.1 вертикальными
линиями. На рис. 1.4 изображён сигнал,
квантованный по уровню и по времени.
1.2 Классификация дискретных сау
В соответствии с названными видами сигналов САУ дискретного действия делят на три типа:
1) релейные с квантованием по уровню;
2) импульсные с квантованием по времени;
Рисунок 1.2 3) цифровые с применением обоих видов квантования.
1.3 Импульсные сау
1.3.1 Понятие об импульсных сау
Импульсная САУ отличается от непрерывной наличием импульсного элемента (ИЭ), осуществляющего квантование сигнала по времени. Простейшая модель импульсной САУ с
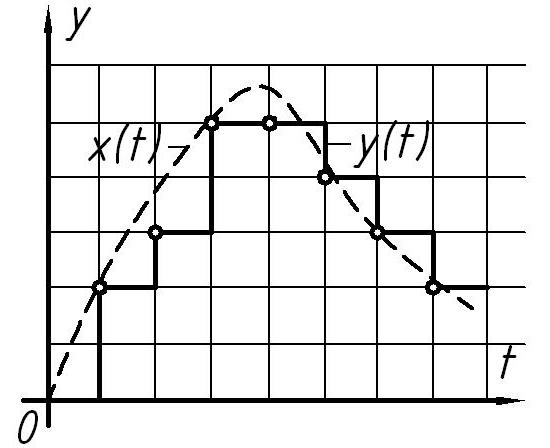 Рисунок 1.3 квантованием
сигнала ошибки управления
Рисунок 1.3 квантованием
сигнала ошибки управления
![]() изображена на рис.1.5 в виде обобщенной
функциональной схемы. Часто ИЭ изображают
в виде некоторого ключа. Период замыкания
ключа Т принимают равным периоду
квантования сигнала ошибки
в реальной системе. При этом ИЭ идеализируют
и считают, что замыкание и размыкание
ключа происходит мгновенно.
Соответственно ИЭ преобразует непрерывный
входной сигнал x(t)
в последовательность модулированных
импульсов (рис.1.6).
изображена на рис.1.5 в виде обобщенной
функциональной схемы. Часто ИЭ изображают
в виде некоторого ключа. Период замыкания
ключа Т принимают равным периоду
квантования сигнала ошибки
в реальной системе. При этом ИЭ идеализируют
и считают, что замыкание и размыкание
ключа происходит мгновенно.
Соответственно ИЭ преобразует непрерывный
входной сигнал x(t)
в последовательность модулированных
импульсов (рис.1.6).
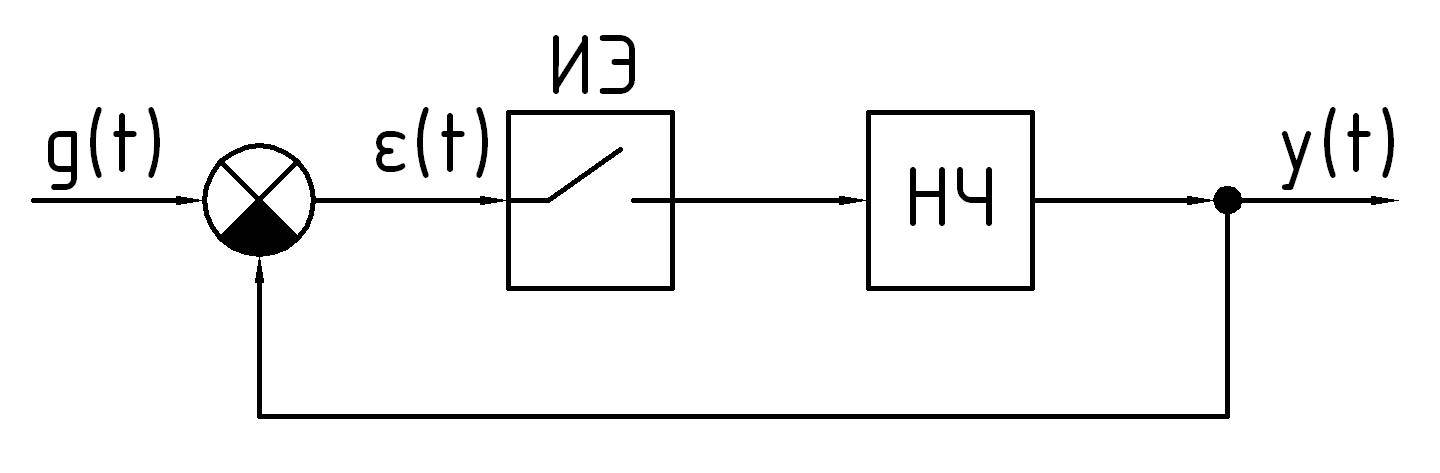 Рисунок 1.4 Поэтому ИЭ
рассматривают как модулятор импульсов,
осуществляющий модуляцию какого-либо
параметра периодически повторяющихся
импульсов по закону изменения входного
непрерывного сигнала, называемого
модулирующим сигналом.
Рисунок 1.4 Поэтому ИЭ
рассматривают как модулятор импульсов,
осуществляющий модуляцию какого-либо
параметра периодически повторяющихся
импульсов по закону изменения входного
непрерывного сигнала, называемого
модулирующим сигналом.
Рисунок 1.5
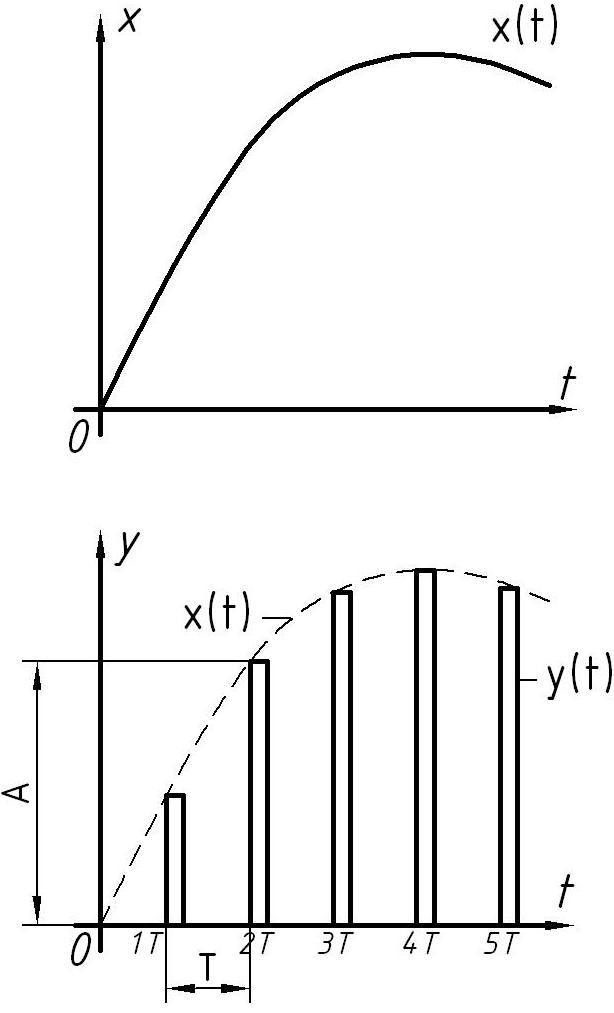 Основными параметрами последовательности
импульсов являются амплитуда (высота)
А, длительность (ширина)tи
,период повторения Т и временной
сдвиг (фаза)
Основными параметрами последовательности
импульсов являются амплитуда (высота)
А, длительность (ширина)tи
,период повторения Т и временной
сдвиг (фаза)
![]() .
В зависимости от того, какой из параметров
изменяется в соответствии с изменением
модулирующего сигнала х(t),
различают: амплитудно-импульсную
(АИМ, рис.1.6), широтно-имульсную (ШИМ,
рис. 1.7) и время-импульсную (ВИМ)
модуляцию. Последнюю, в свою очередь,
подразделяют на фазо-импульсную
(ФИМ) и частотно-импульсную (ЧИМ)
модуляцию.
.
В зависимости от того, какой из параметров
изменяется в соответствии с изменением
модулирующего сигнала х(t),
различают: амплитудно-импульсную
(АИМ, рис.1.6), широтно-имульсную (ШИМ,
рис. 1.7) и время-импульсную (ВИМ)
модуляцию. Последнюю, в свою очередь,
подразделяют на фазо-импульсную
(ФИМ) и частотно-импульсную (ЧИМ)
модуляцию.
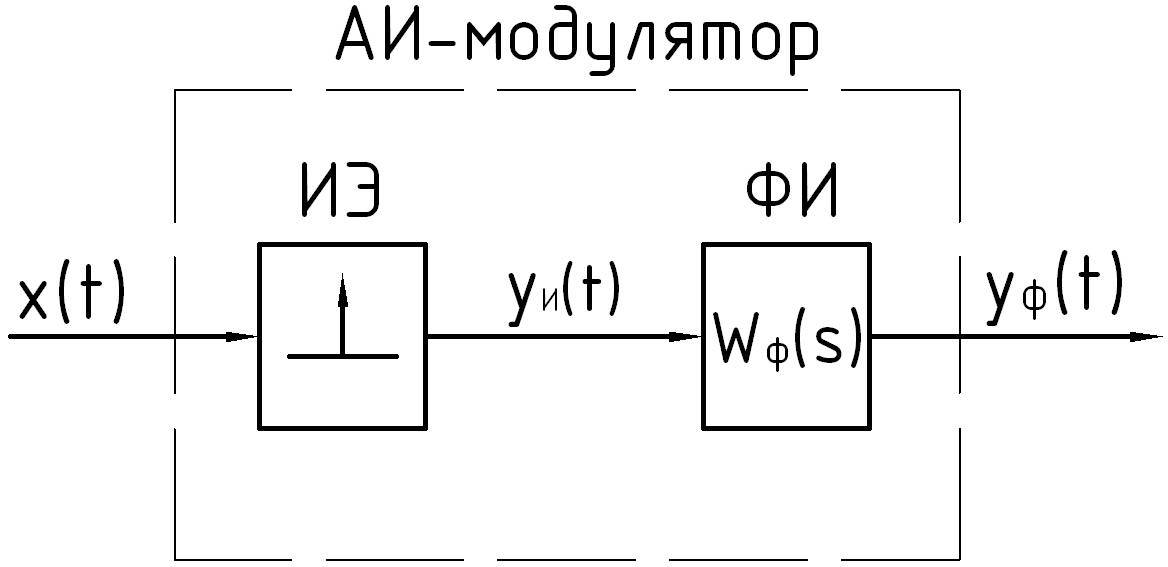
Все названные виды модуляции сигналов используют в технике автоматического регулирования. Технические устройства, осуществляющие эти преобразования, называют соответственно амплитудно-импульсными преобразователями, широтно-импульсными преобразователями и т.д. Для математического моделирования этих устройств разработаны типовые модели. Математическую модель амплитудно-импульсного преобразователя обычно называют АИ-модулятором.
Рисунок 1.6 АИ-модулятор состоит из последовательно соединенных
и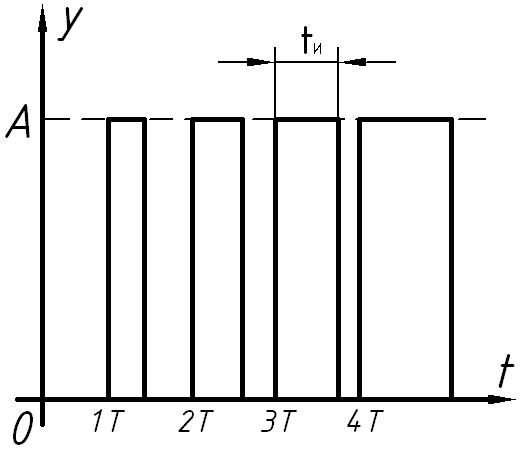 деального
ИЭ и формирователя импульсов (ФИ) (рис.
1.8). ИЭ осуществляет квантование входного
сигнала х(t)
по времени. Выходной сигнал ИЭ уи(t)
представляет собой последовательность
деального
ИЭ и формирователя импульсов (ФИ) (рис.
1.8). ИЭ осуществляет квантование входного
сигнала х(t)
по времени. Выходной сигнал ИЭ уи(t)
представляет собой последовательность
![]() -функций,
промодулированных дискретными значениями
сигнала х(t).
ФИ преобразует промодулированные
-импульсы
в импульсы заданной формы. Если формируются
импульсы прямоугольной
-функций,
промодулированных дискретными значениями
сигнала х(t).
ФИ преобразует промодулированные
-импульсы
в импульсы заданной формы. Если формируются
импульсы прямоугольной
формы (длительности tи) передаточная функция ФИ имеет вид
Рисунок 1.7
![]() .
.
Если tи <<Т,
то
![]() и.
и.
Если tи=T,
то
![]() .
.
 Такой формирователь называют
фиксатором нулевого порядка. Он
преобразует импульсный сигнал в
ступенчатый (рис. 1.9). Фиксатор «растягивает»
мгновенный входной импульс уи(t)
на период следования импульсов Т
или «запоминает» площадь мгновенного
входного импульса. Таким образом,
простейший АИ –модулятор преобразует
любой непрерывный входной сигнал х(t)
в последовательность прямоугольных
импульсов, которая на рисунке 1.9 изображена
ступенчатой линей уф(t).
Такой формирователь называют
фиксатором нулевого порядка. Он
преобразует импульсный сигнал в
ступенчатый (рис. 1.9). Фиксатор «растягивает»
мгновенный входной импульс уи(t)
на период следования импульсов Т
или «запоминает» площадь мгновенного
входного импульса. Таким образом,
простейший АИ –модулятор преобразует
любой непрерывный входной сигнал х(t)
в последовательность прямоугольных
импульсов, которая на рисунке 1.9 изображена
ступенчатой линей уф(t).
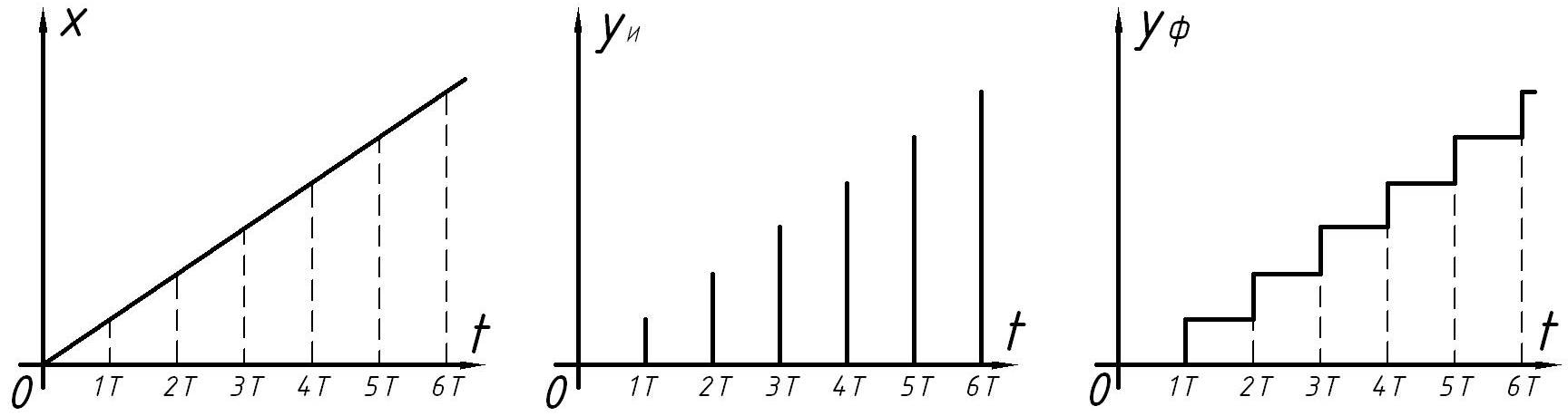 Рисунок 1.8
Рисунок 1.8
Рисунок 1.9