

4.6.2.4 Самонастраивающиеся сау с оптимизацией качества управления
 Эти системы называют также
экстремальными самонастраивающимися
САУ. В отличие от рассмотренных
самонастраивающихся САУ со стабилизацией
качества управления задачей самонастройки
в этих САУ является поддержание
оптимального значения критерия качества
управления J. Последний
поэтому может быть назван критерием
оптимальности, как в неадаптивных
оптимальных САУ (см.4.2). Рассматриваемые
самонастраивающиеся САУ отличаются от
неадаптивных оптимальных САУ автоматическим
изменением оператора, обеспечивающим
оптимальность управления, т.е. оптимум
выбранного критерия качества управления,
при всех изменениях внешних условий и
свойств ОУ.
Эти системы называют также
экстремальными самонастраивающимися
САУ. В отличие от рассмотренных
самонастраивающихся САУ со стабилизацией
качества управления задачей самонастройки
в этих САУ является поддержание
оптимального значения критерия качества
управления J. Последний
поэтому может быть назван критерием
оптимальности, как в неадаптивных
оптимальных САУ (см.4.2). Рассматриваемые
самонастраивающиеся САУ отличаются от
неадаптивных оптимальных САУ автоматическим
изменением оператора, обеспечивающим
оптимальность управления, т.е. оптимум
выбранного критерия качества управления,
при всех изменениях внешних условий и
свойств ОУ.
Таким образом, УУА автоматически решает задачу оптимизации, которую однократно решает конструктор неадаптивной оптимальной системы при её конструировании или периодически оператор-настройщик при эксплуатации САУ. Такую автоматическую оптимизацию рассматривают как особый
Рисунок 4.6 тип автоматического управления наряду
с управлением по отклонению и управлением по возмущению. Основой автоматической оптимизации является автоматический поиск оптимального оператора УУО.
Принцип действия рассматриваемых самонастраивающихся САУ зависит от того, какой режим САУ характеризуется принятым критерием качества – динамический или статический. Соответственно различают самонастраивающиеся САУ с оптимизацией динамических режимов и с оптимизацией статических режимов системы.
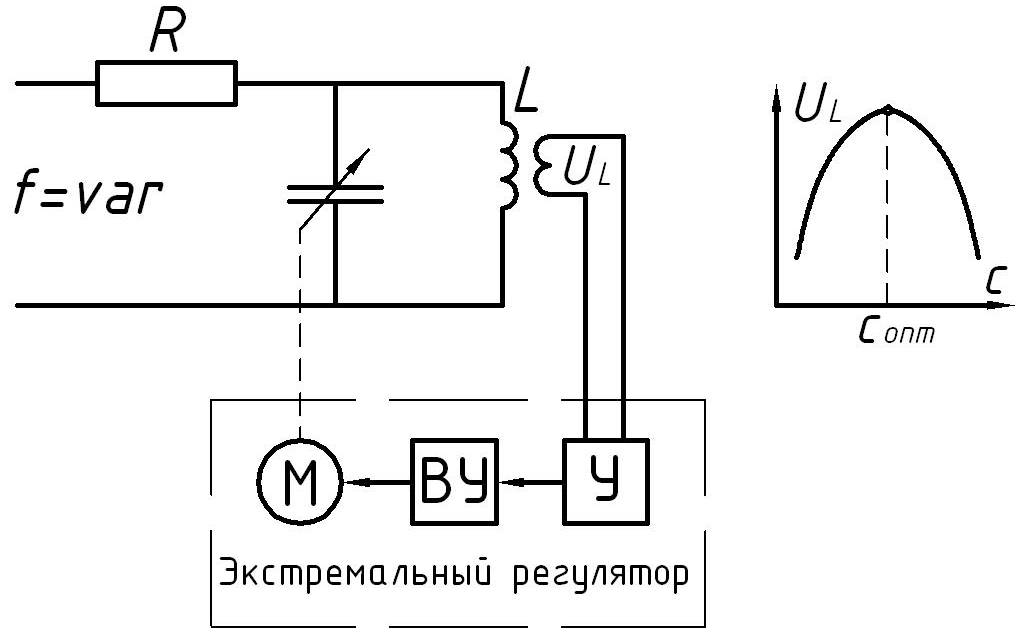
Последние называют также системами экстремального регулирования. Они являются простейшими самонастраивающимися САУ с оптимизацией качества управления. В них поддерживается оптимальное значение такого критерия, который характеризует работу ОУ в статическом режиме, т.е. обеспечивается работа в точке экстремума соответствующей статической характеристики. Примером ОУ такой системы экстремального регулирования является система автоматической настройки колебательного контура в резонанс (рис.4.6).