

22.Перевірка адекватності моделі за методом Фішера
У ході оцінки адекватності при рототабельному і ортогональному плануванні розрахункове значення критерію Фішера визначають як відношення дисперсії адекватності до дисперсії досліду:

і
порівнюють з табличним
 для ступенів волі
для ступенів волі
 і
і
 .
.


23.Загальна характеристика методів оптимізації моделі
Оптимізація полягає в знаходженні оптимуму функції, якою описується об’єкт, або знаходженні оптимальних умов технологічного процесу.
Для оцінки оптимуму встановлюються критерії оптимізації.
На підставів обраного критерію складається цільова функція або функція вигоди, що представляє собою залежність критерію оптимізації від параметрів, що впливають на її значення.
Додатково можуть бути задані обмеження на задані параметри.
Для автоматизації керованих процесів або систем розрізняють 2 стадії оптимізації – статичну та динамічну.
Прогблеми створення та реалізації оптимального стаціонарного режиму процесу вирішує статична оптимізація, а створення і реалізація систем оптимального управління процесом вирішує динамічна оптимізація.
В залежності від характеру створених моделей об’єктів застосовуються наступні методи оптимізації:
Аналітичні
-аналітичний пошук екстремуму
-метод множників Лагранжа
-принцип максимуму Потрягіна
Математичне програмування
-геометричне прорамування
-лінійне програмування
-динамічне програмування
Градієнтні
Метод найшвидшого спуску
-метод градієнта
Атоматичні
-комютерні функції
Статистичні
-регресійний аналіз
-кореляційний аналіз
-методи статистики
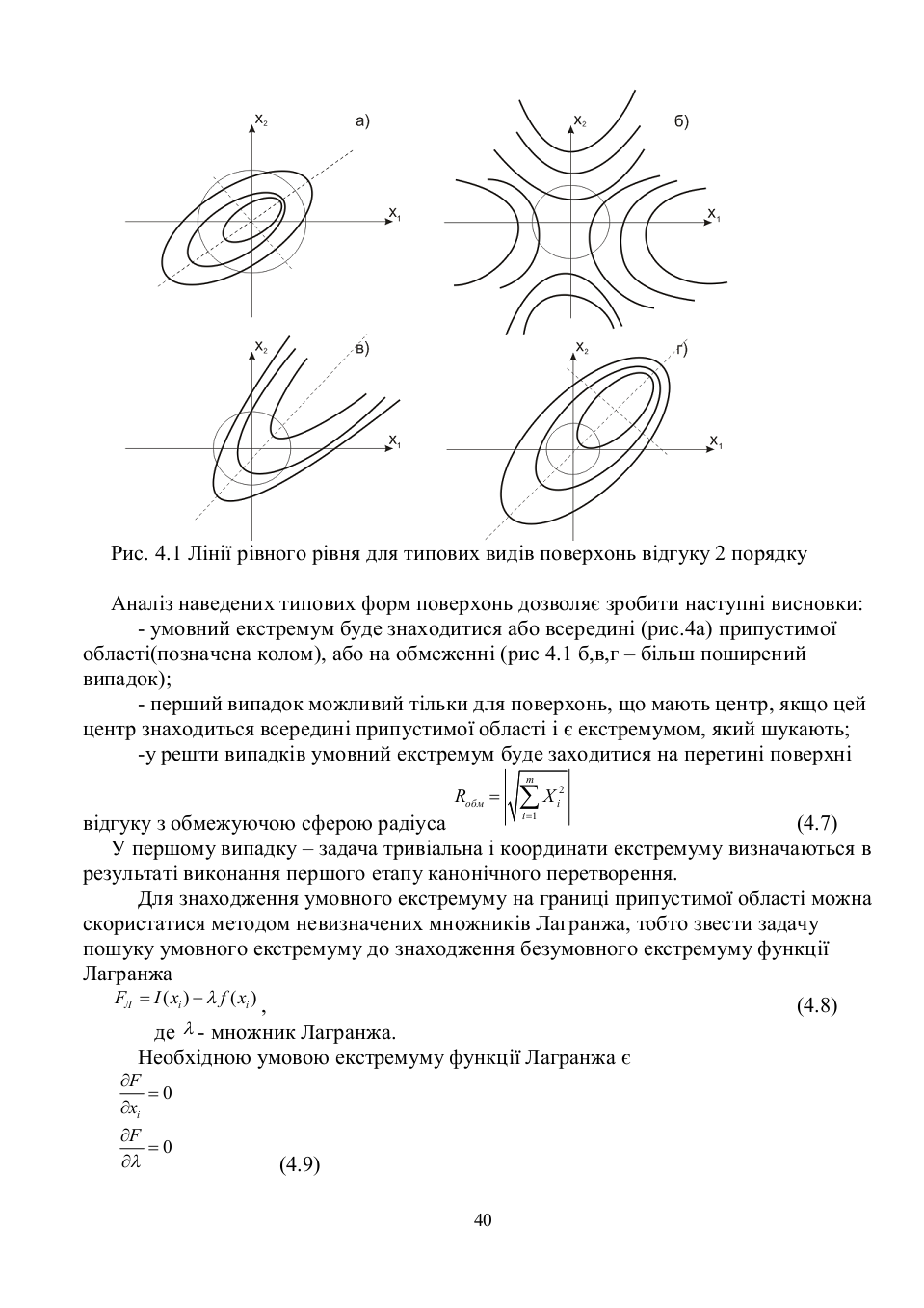
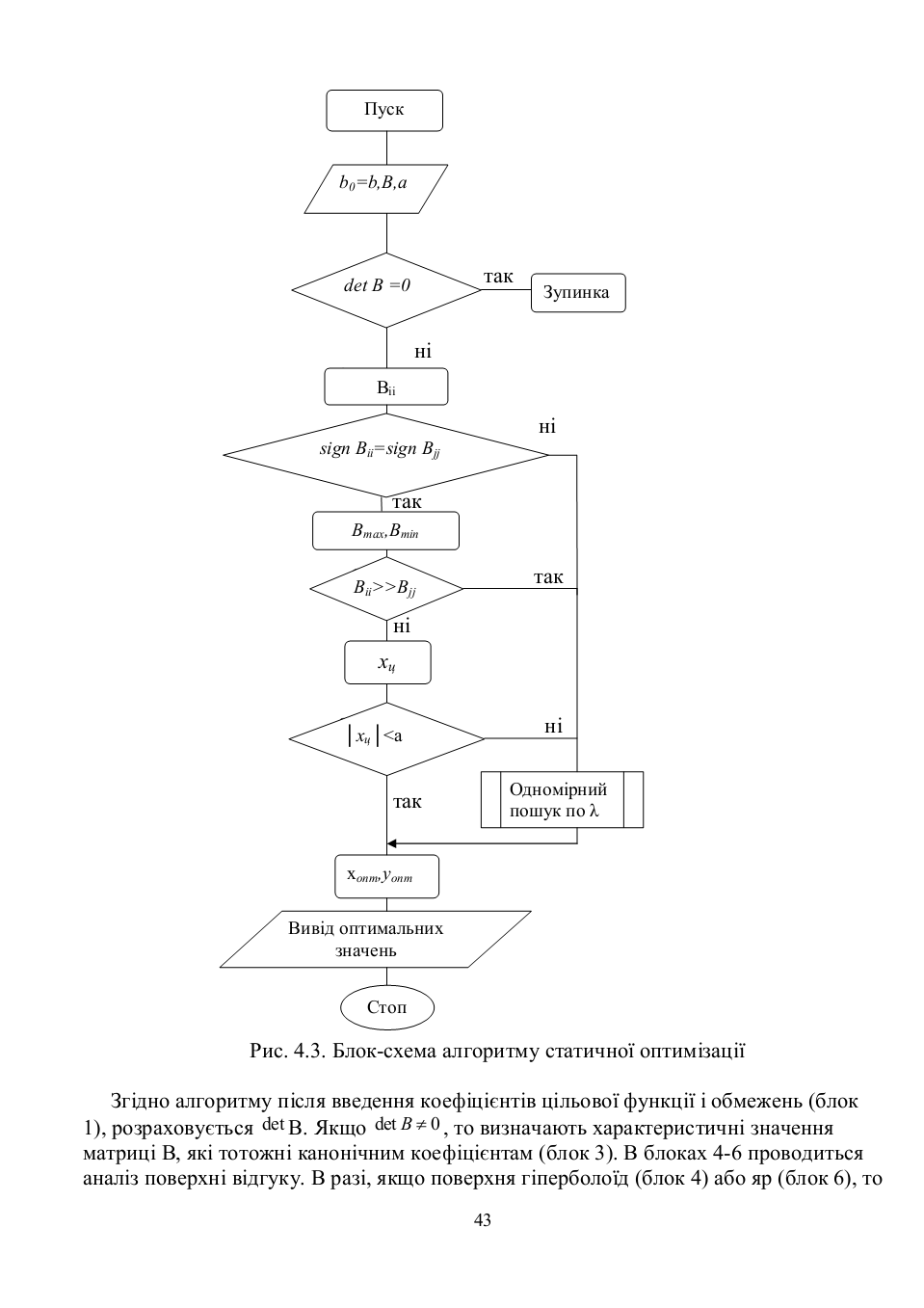
24.Аналітичні методи оптимізації. Оптимізація об’єктів за методом Лагранжа



25. Загальна схема динамічної ідентифікації параметрів моделі.
На динамічних об’єктах проводяться активні та пасивні експерименти. Активні передбачають подачу на вхід об’єкта деякого збурюючого сигналу. Пасивні є результатом спостережень за об’єктом без втручання в хід технологічного процесу.
Розглянемо спочатку методи визначення параметрів об’єктаза результатами пасивних експериментів. У даному випадку загальна схема динамічної ідентифікації така:

Згідно загальної схеми ідентифікації вхідний сигнал Х подається на об’єкт Ф, а також на деякий ідентифікатор φ. В якості ідентифікатора виступає модель об’єкта(пристрій, програма). Задачею ідентифікатора є таке настроювання параметрів об’єкта, щоб вихідні сигнали Y та Y* відрізнялися найменшим чином. При цьому вихідний сигнал Y подається на ідентифікатор для порівняння із сигналом Y*.
Для знах. параметрів об’єкта вводиться ф-я нев’язки.
 – функція
нев’язки.
– функція
нев’язки.
Y*=Y*(X,Y,C)
t=NΔt
Δt – тривалість спостереження за об’єктом; N – к-сть спостережень.
Отже, знах. параметрів об’єкта С(С1,С2,…,Сn) згідно заг. схеми ідентифікації проводиться в дискретні моменти часу. Крім того для динамічних об’єктів вводяться початкові або крайові умови. Такі умови впливають на функціональний зв’язок параметрів моделі, а тому використовуються для керування ходом експерименту.
26. Ідентифікація моделі динамічногго об’єкта.
Динамічний об’єкт відрізняється від статичного тим, що його стан Yi визначається не тільки значеннями вхідних сигналів Xi, але і станом об’єкта в попередній момент часу Yi-1. Цу так звана “пам’ять” об’єкта, що робить його інерційним.
Дискретна загальна модель динамічного об’єкта на стадії ідентифікації:
Yi=F(Yi-1,Xi,C)
Задача ідентифікації полягає в тому, щоб визначити параметри С, при яких ф-я нев’язки буде мінімальною. При цьому визначення параметрів відбувається в дискретні моменти часу. Ф-я нев’язки в даному випадку така:

Yi,Yi-1,Xi – експериментальні значення вихідного та вхідного сигналів.
Yi-1 – значення вихідного сигналу в попередній по відношенню до Yi момент часу.