

32. Ідентифікація об’єкта за імпульсною перехідною характеристикою.
П араметричний
опис динамічного об'єкта не є єдиним.
Лінійний об'єкт із постійними параметрами
можна описати за допомогою імпульсної
перехідної функції. Сигнал на виході
такого об'єкта описується рівнянням
згортки
араметричний
опис динамічного об'єкта не є єдиним.
Лінійний об'єкт із постійними параметрами
можна описати за допомогою імпульсної
перехідної функції. Сигнал на виході
такого об'єкта описується рівнянням
згортки
,де
 ,
,
 — сигнали на вході і виході системи;
— сигнали на вході і виході системи;

 — імпульсна
перехідна функція (ІПФ).
— імпульсна
перехідна функція (ІПФ).
Зокрема,
коли сигнал при
 дорівнює нулю,описується перехідний
процес:
дорівнює нулю,описується перехідний
процес:
.Визначення динамічних характеристик такого об'єкта базується на зв'язку вза’ємнокореляційних функції вхідного і вихідного сигналів і шуму, кореляційної функції вхідного сигналу й імпульсної перехідної функції:
 ,де
,де
 — вза’ємнокореляційна функція шуму і
вхідного сигналу.
— вза’ємнокореляційна функція шуму і
вхідного сигналу.
Я кщо
вхідний вплив і шум не залежать один
від одного і їхня взаємна кореляційна
функція дорівнює нулю, рівняння для
визначення імпульсної перехідної
функції
кщо
вхідний вплив і шум не залежать один
від одного і їхня взаємна кореляційна
функція дорівнює нулю, рівняння для
визначення імпульсної перехідної
функції
 приймає вид:
приймає вид:
Рішення останнього рівняння проводять трьома різними методами: підбором ординат імпульсної функції на керованому фільтрі; приведенням цього рівняння до системи лінійних алгебраїчних рівнянь; перетворенням Фур'є.
Рівняння згортки приводяться до системи алгебраїчних рівнянь заміною інтеграла якою-небудь квадратурною формулою. Наприклад, при використанні формули прямокутників одержуємо систему рівнянь
 ,
,
де
 — інтервал дискретності;
— інтервал дискретності;
 - шукані ординати імпульсної характеристики.
- шукані ординати імпульсної характеристики.
Таким
чином, якщо
 і
і
 розраховані, задача ідентифікації
зводиться до рішення системи лінійних
рівнянь розмірністю
розраховані, задача ідентифікації
зводиться до рішення системи лінійних
рівнянь розмірністю
 .
.
33.Індентифікація об’єктів за частотними характеристиками
В даному випадку задача полягає, щоб за графіками вхідного сигналу та вихідного побудувати АЧХ та ФЧХ. Для цього необхідно подати на вхід об’єкта сигнал x(t) у вигляді прямокутної хвилі. В більшості випадків для об’єктів автоматизації на виході об’єкта будемо мати сигнал деякої синусоїдальної форми з іншою амплітудою та зміщенням фази відносно вхідного сигналу. Значення АЧХ та ФЧХ за співвідношенням:
A(ω)=Aвих/Авх , ƒ(ω)=-2П(∆T/T)
На вхід обєкта необхідно подавати сигнали різного періоду Т. В результаті отримаємо сукупність експериментальних точок A(ω), ƒ(ω).На основі яких будуємо емпіричніі лінії регресії та апроксимуємо за методом найменших квадратів.
Якшо на вхід об’єкта подається прямокутні хвилі ,та амплітуда вихідного сигналу визначається із виразу Авх=(φ/П)*А, де А- амплітуда прямокутної хвилі.
34.Індентифікація перехідної характеристики з використанням методів площ.
Дана задача полягає в знаходженні коеф. перехідної характеристики за її графіком та з використанням методу площ. Розглянемо далі різні випадки перехідної характеристики.
1 .Пропорційна
ланка
.Пропорційна
ланка
W(p)=K
h(t)=K(t)
K=h(t)│t ˃0
2.Інтегральна ланка
W (p)=K/p
(p)=K/p
h(t)=K*p K=n(t1)/t1
3.Ідеальна диференціальна
W (p)=K*p
(p)=K*p
h(t)=Kδ(t)

4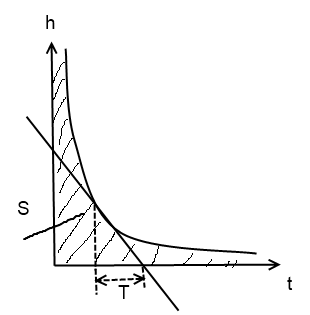 .Реальна
диференціальна ланка
.Реальна
диференціальна ланка



S-площа під градієнтом функції h(t)
5.Аперіодична ланка першого порядку





35.Ідентифікації моделей об’єктів третього порядку за їх часовими характеристиками
Такого типу об’єкти записують у вигляді диф рівнянь :
а3yIII+a2yII+a1y+y=F
де вигляд функції F залежить від кривої розгону об’єкта. Якщо крива розгону має один із наступних виглядів:

Якщо крива розгону має вигляд (а,б,в,г),то F=x

Якщо має вигляд д,е,то F=в1хІ+х

Якщо має вигляд є,то F=в1хІ
Роглянемо спочатку випадок , коли ДР об’єкта має вигляд:
а3yIII+a2yII+a1y+y=х (1)
Задача ідентифікації полягає у знаходженні невідомих коефіцієнтів а3, а2, а1. Для цього структуру об’єкта представимо у вигляді двох послідвно з’єднаних ланок, перша з яких аперіодична, а друга ланка 2-го порядку.
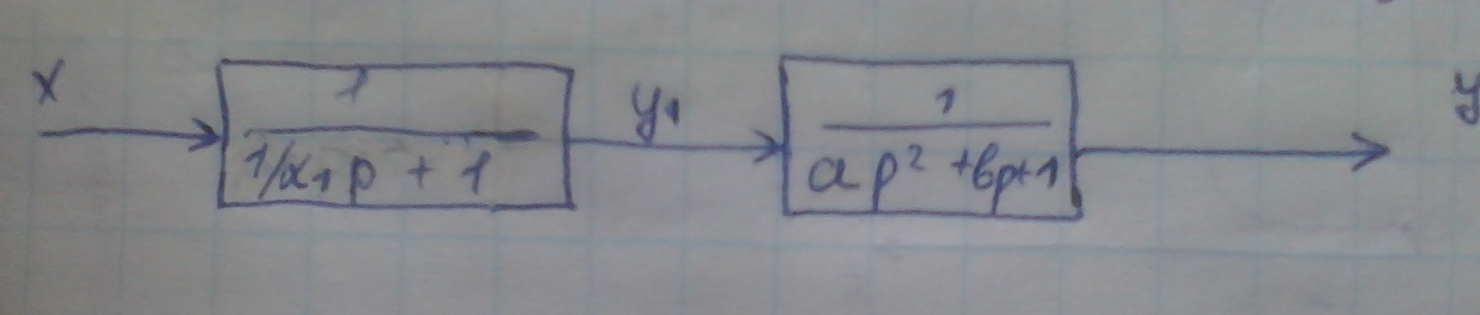
де коеф. α1 ;а ; в знаходяться із прирівнювання передаточної функції двох ланок.
Оскільки ланки з’єднані послідовно, то вират для знаходження α1 ;а ; в матиме вигляд:


Прирівнюючи коеф. при відповідних степенях параметра р матимемо:

При подачі на вхід першої ланки сигналу х=1 на виході із неї матимемо у1=1-е-α1t
Даний сигнал у1 є вхідним для другої ланки об’єкта , тоді ДР другої ланки можна записати у вигляді:
аyIII+вyII+y =1-е-α1t, (2)
Після цього на основі даного рівняння з використанням графіка перехідної х-ки шукатимемо коефіцієнт α1 ;а ; в.
Перехідна х-ка ланки:

З графіка перехідної х-ки визначаємо точку перетину функції. Як відомо в точці перетину уІІ(tn)=0
В точці перегину рівняння 2 матиме вигляд:
вyI(tn)+y(tn) =1-е-α1tn

 (3)
(3)
Для знаходження двох інших α1 і в
аyII+вyI+ е-α1t=1-у (4)
Виберемо дві довільні точкі t1 i t2
і про інтегруємо р-ня 4 в межах від t1 до t2

де
 це плоша над графіком перехідної хки
та лінією встановленого значення у
це плоша над графіком перехідної хки
та лінією встановленого значення у

 ;(5)
;(5)
В рівнянні (5) візьмемо за межі інтегрування t1=0, t2=∞
y(0)=0;y(∞)=1
yI(0)=0;yI(∞)=0
Тоді рівняння (5) матимеме вигляд:
а(0-0)+в(1-0)-1/α(1-0)=
в-1/α=
α=1/в+ (6)
Для знаходження останнього невідомого коеф. а розглянемо площину фігури в межах t1=tn,t2=∞
Тоді рівняння (5)матимеме вигляд:

де Stn-площа фігури над графіком перехідної функції від точки перетину до нескінченості

Отже ми отримали р-ня (3),(6),(7) для знаходження коеф. α1 ;а ; в
У випадку якщо ДР р-ня об’єкта мають
вигляд:
випадку якщо ДР р-ня об’єкта мають
вигляд:
т о
їх передаточні функції будуть:
о
їх передаточні функції будуть:
т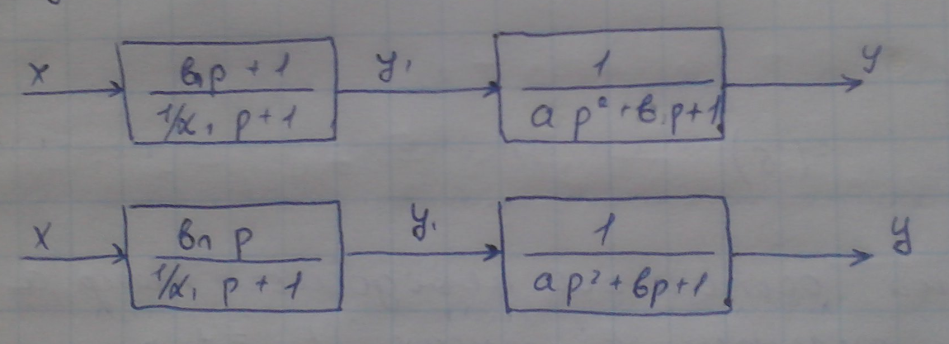 о
тоді для знаходження аналогічно до
попереднього випадку структури таких
об’єктів зображують у вигляді :
о
тоді для знаходження аналогічно до
попереднього випадку структури таких
об’єктів зображують у вигляді :
у першому випадку маємо послідовне з’єднання інтегрально-диференціальної ланки та ланки 2-го порядку
у другому випадку-послідовне з’єднання диференціальної та ланки 2-го порядку.
