

42 Блоки Matlab дослідження динамічних об’єктів.
Пакет Simulink бібліотеки блоків Matlab дозволяє здійснювати моделювання та дослідження.Вибравши в Matlab пункт меню File-New-Model. Для роботи з об’єктами автоматизації в Matlab є бібліотека Simulink.
Simulink має 7 основних розділів:
Sources- (джерела): constant (константа), signal generator – (періодичний сигнал: синусоїдальний (sine), прямокутний (square), трикутний (sawtooth), випадковий (random)) – (в цьому блоці встановлюється амплітуда, частота, одиниці вимірювання частоти),step – стрибкоподібний сигнал, sine wawe – гармонічний сигнал, discrete nulse generator – дискет прямо кут імпульси, clock – неперервний часовий сигнал, digital clock – дискретний часовий сигнал.
Sinks – (приймачі): scope – графік залежності величини від часу, XY Graph – графік в системі ХУ, Display – числове значення вих. сигналу, To File - дані у Mat-файлі, To workspase – результат в робочому просторі
Linear- (лінійні елементи): Gain – лінійна перехідна ланка, Transfer Fcn – ПФ обєкта, Stace-spase –визначання обєкта через задання 4-ох матриць його простору стану АВСД, Derivative – ідеальна диф ланка, integrator – ідеал. інтегруюча ланка, sum - суматор.
Nonlinear (НЕ): abs – модуль, trigonometric function – перетворення вх. сигналу за допомогою тригонометричних функцій(sin, cos, tan, asin, acos, atan, sinh, cosh), logical operator – містить осн логічні операції, manual switch - 2 входи і 1 вихід – ручний перемикач сигналів.
Discrete (дискретні елементи): Unit Delay – затримка вх. сигналу, Discrete filter- задання дискретного об’єкта через дискретну ПФ.
Conection (зєднання): In,Out – заб звязок між підсистемами моделі за інформацією, Mux – (концентратор) зєднання вх. величин у один вихідний сигнал, Demux – (розділювач) розділяє вх. вектор на задане число компонентів, Subsystem – створення підсистем.
blocksets & toolboxes (набори блоків і інструменти) - містить блоки, створені користувачем і включені в робочу конфігурацію пакета.
43. Моделювання об’єктів автоматизації в Матлаб.
Можна дослідити практично б-я САР. Для цього в Матлаб можна змоделювати 3 типи моделей, а саме віртуальні, структурні та функціональні. Всі ці 3 типи моделей будуються стандартним чином з використанням бібліотеки блоків Matlab.
Функціональні моделі відображають логіку функціонування об’єкта. Структурні – це моделі, що побудовані за структурною схемою об’єкта.
Модель схеми синхронізації в Матлаб.

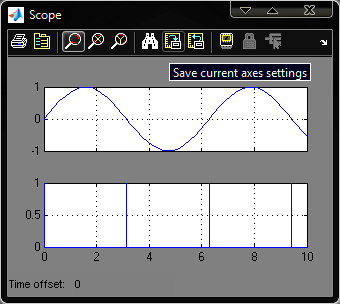
Дана модель використ при дослідженні схеми синхронізації фазної напруги в керованому випрямлячі, а саме при проходженні вх. сигналу через нульове значення дана модель генерує імпульс. Стурктурні моделі використовуються при моделюванні об’єктів автоматизації, які задані своїм математичним описом, і стандартних регуляторів в керуючій частині системи регулювання.
Узагальнений пропорційно- інтегрально – диференціальний регуляторо (ПІД) описується рівняння
 ,
,
 ,
,
 ,
,
 – коефіцієнти підсилення П, І, Д ланки
відповідно.
– коефіцієнти підсилення П, І, Д ланки
відповідно.
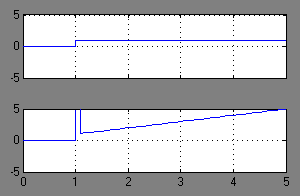
Структурна модель ПІД – регулятора: Кп=1 Кі=1 Кд=0.01

Динамічні хар-ки об’єктів можуть бути оцінені не тільки параметрами перехідного процесу, тобто реакцією системи на вхідний сигнал, але і рядом інших характеристик, а саме: - імпульсна характеристика, -АЧХ ФЧХ, - розміщення полюсів і нулів ПФ системи і тд.
Модель об’єкта що заданий ПФ.

вибираємоTools\Linear Analisis
зявиться вікно LTI Viewer вибираємо Simulink\Get\Linearized Model і отримуємо моделювання.
Для інших характеристик вибираємо у LTI Viewer пункт Edit\Рlot Configuration.У вікні задаєм методиі виб пункт Get\Linearized Model