

Обратные преобразователи.
Магнитоэлектрические приборы можно рассматривать как преобразователи электрических сигналов в механические.
Преобразователи электрической энергии в механическую.
Магнитоэлектрические преобразователи делятся на:
1). i → F, M – магнитоэлектрические преобразователи;
2). электромагнитные преобразователи;
3). электростатические преобразователи.
Рассмотрим пример магнитоэлектрического преобразователя:

1 – магнит (магнитотвёрдый материал);
2 – арматура – магнитопровод;
3 – обмотка, помещенная в рабочем зазоре;
Электрическая схема:

Проведем расчет:
,
где
![]() магнитоэлектрический момент,
магнитоэлектрический момент,
![]() - позиционный момент, уравновешивающий
момент внешних сил,
- позиционный момент, уравновешивающий
момент внешних сил,
![]() -
электрическая жесткость.
-
электрическая жесткость.
Разберем подробнее обратные преобразователи магнитоэлектрического типа. Он содержит:
1). постоянный магнит;
2). обмотка обратной связи.


![]()
Поместим
катушку
![]()

Тогда:
![]()


1 – тонкостенный металлический каркас (цилиндр);
2 – катушка;
1 – 1 – короткозамкнутый виток.
Каркас катушки – один короткозамкнутый виток. Таким образом:

, где t – толщина каркаса.

![]()
- , + соответственно отрицательная и положительная обратная связь.
Рассмотрим демпфер магнитоэлектрического типа на базе обратного преобразователя:

3.1 – дополнительная обмотка демпфера;
3.2 – основная обмотка.
![]()
Демпфирование.
Общий вид динамического уравнения движения:
![]() (1)
(1)
![]()
![]() (2)
(2)
где ξ – относительный коэффициент демпфирования.
Общее решение дифференциального уравнения (2) будем искать в виде суммы вынужденной и свободной составляющих:
![]()
Вначале определим свободную составляющую решения. Для этого запишем характеристическое уравнение, соответствующее дифференциальному уравнению (2):
![]()
и найдем его корни:

В
случае
![]() уравнение (2) приобретает вид:
уравнение (2) приобретает вид:
![]() ,
,
а корни его характеристического
уравнения:
![]()
Таким корням характеристического уравнения соответствует следующее решение дифференциального уравнения:
![]()
Константы
А и В можно определить из начальных
условий:
![]()
Подставляя найденные значения констант в выражение для x(t), получим свободную составляющую решения дифференциального уравнения (2):
Вынужденная составляющая решения уравнения (2) определяется выражением:
![]()

x(t)
![]()
![]() t
t
В
случае
![]() корни характеристического уравнения
определяются соотношением:
корни характеристического уравнения
определяются соотношением:
![]()
Проанализируем последнее выражение:
В
случае
![]() корни комплексно-сопряженные.
корни комплексно-сопряженные.
В
случае
![]() корни действительные, равные.
корни действительные, равные.
В
случае
![]() корни действительные, не равные.
корни действительные, не равные.
Рассмотренным значениям относительного коэффициента демпфирования соответствуют следующие свободные составляющие решения уравнения (2):
![]() ;
;
![]()
![]()
В
случае
![]() переходный процесс колебательный:
переходный процесс колебательный:
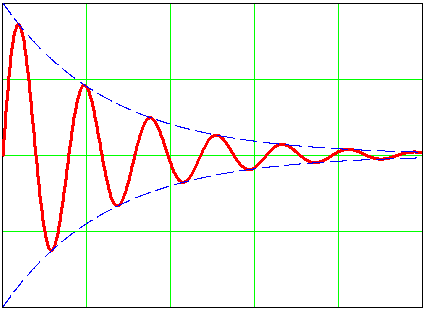 X(t)
X(t)
![]()


 XУCT
XУCT
 t
t
![]()

Т

В
случае
![]() переходный процесс апериодический,
причем с увеличением демпфирования
замедляется темп процессов:
переходный процесс апериодический,
причем с увеличением демпфирования
замедляется темп процессов:
![]()



 ХУСТ
ХУСТ
0 t
При наличии демпфирования
![]() ,
где
,
где
![]() ,
,
![]() .
.