

Функциональные и структурные схемы аср
Любую АСР, как и устройство можно представить как комбинацию простейших элементов, соединенных между собой и воздействующих друг на друга.
Если система расчленяется по функциональному признаку (по роду выполняемых функций элементами), то получаются функциональные схемы. При этом каждый элемент изображается в виде прямоугольника, внутри которого проставляется его функциональное обозначение. Те воздействия которые элементы оказывают друг на друга изображаются стрелками или линиями.
Пусть Qп, Qн – расходы подачи газа и нагрузки на ОУ, Хр – сигнал с регулирующего устройства; l – перемещение подвижного органа.
Пневматическое исполнительное устройство (МИМ), установленное на трубопроводе . Оно состоит из исполнительного механизма (ИМ) и регулирующего органа (РО) , т.е. устройство имеет два функциональных блока и его функциональная схема будет выглядеть следующим образом:
Если в данном примере трубопровод принять за объект управления, то данная система регулирования расхода будет представлена в виде следующей функциональной схемы
Если АСР разбивается по динамическому принципу, т.е. происходит изменение сигнала по времени, то имеет место структурная схема.
Структурные схемы состоят из динамических звеньев, узлов суммирования, и узлов разветвления. Динамические звенья изображаются в виде прямоугольника, внутри которого записывается передаточная функция звена. Узел суммирования выполняется в виде знака суммирования , узел разветвления в виде точки. Эти элементы соединяются между собой стрелками, показывающими направление прохождения сигнала.
При прохождении сигнала через узел разветвления значение его на выходе не изменяется, т.е.
хвх = хвых1 = хвых2 = хвых3 = … = хвыхn
При прохождении сигналов через узел суммирования их значение на выходе суммируется, т.е.
хвых = хвх1 + хвх2 + хвх3 + … + хвхn
Динамические звенья
При прохождении сигнала через динамическое звено он изменяется как по величине, так и форме.
Звенья классифицируются по динамическим свойствам, т.е. по уравнению связи между входным и выходным сигналами, что позволяет:
- не учитывать функциональную сущность процесса;
не учитывать конструктивное исполнение устройства.
Динамические звенья, описываемые уравнениями не выше второго порядка, носят название типовых.
Основными типовыми звеньями являются:
- усилительное;
- инерционное;
- колебательное;
- интегрирующее;
- дифференцирующее идеальное;
- дифференцирующее реальное;
- запаздывающее.
Типовые динамические звенья
Усилительное (безинерционное) звено.
Уравнение связи имеет следующий вид xвых = k xвх,
где k – коэффициент пропорциональности (усиления).
П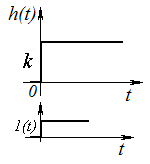 ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
h(t) = k 1(t) .
При прохождении сигнала через звено его форма не изменяется, а лишь меняется его величина. Звено не задерживает сигнал, мгновенно пропуская его к выходу. Поэтому звено является безинерционным.
В реальных системах таких звеньев нет. Обычно в АСР принимают за такие звенья те, у которых инерционность значительно меньше чем у других.
Передаточная функция звена имеет следующий вид W(p) = k.
Статическая и динамическая характеристика усилительного звена совпадают, и поэтому такое звено является статическим.
Инерционное звено (апериодическое первого порядка).
Уравнение
связи имеет следующий вид
![]()
где T – постоянная времени объекта.
При единичном ступенчатом воздействии xвх = 1(t) переходный процесс описывает следующее выражение
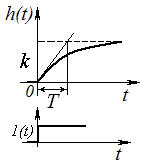 h(t)
= k
(1-e-t/T)
.
h(t)
= k
(1-e-t/T)
.
Переходный процесс носит не колебательный характер, постоянно (асимптотически) приближаясь к новому равновесному состоянию. Поэтому звено называется инерционным. Чем больше постоянная времени, тем звено более инерционно.
Передаточная
функция звена имеет следующий вид
![]()
При
t
![]() .
Уравнение связи будет описываться как
.
Уравнение связи будет описываться как
xвых = k xвх..
Следовательно, уравнения статики и динамики совпадают и такое звено является статическим.
Колебательное звено (апериодическое второго порядка).
Уравнение
связи имеет следующий вид
![]()
где T1, T2 – постоянные времени объекта.
Если T1/T2 2, то имеет место колебательное звено. Если T1/T2 2, то имеет место инерционное звено второго порядка. При единичном ступенчатом воздействии xвх = 1(t) переходный процесс описывает следующее выражение
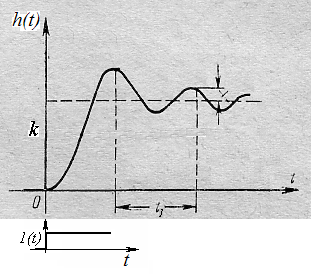
h(t) = k{1-e-t[cost + (/)sint]},
где
= T2/2T12
;
![]() – частота изменения сигнала
– частота изменения сигнала
где t = 2 - период затухания колебаний. = 2T1/T2
Т.е. при прохождении через звено сигнал, колеблясь относительного нового равновесного состояния с течением времени, затухает, поэтому звено периодическое инерционное.
Передаточная
функция звена имеет следующий вид
![]()
При
t
и
![]() .
.
Уравнение связи будет описываться как xвых = k xвх..
Следовательно, уравнения статики и динамики совпадают и такое звено является статическим.
Интегрирующее звено.
Уравнение
связи имеет следующий вид
![]()
Это выражение показывает, что скорость изменения выходного сигнала в данном случае пропорционально величине входного.
Уравнение (проинтегрировав) можно записать в следующем виде
![]() .
.
Поэтому оно носит название интегрирующего.
П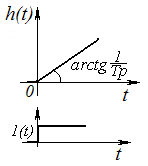 ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
h(t) = kt,
При прохождении через звено сигнал монотонно возрастает и не имеет определенного равновесного состояния. Следовательно такое звено является астатическим. Только в случае, когда xвх. = 0, то xвых = const, т.е. при нулевом значении входа выходной сигнал принимает то значение на котором наступило равновесие.
Передаточная
функция звена имеет следующий вид
![]()
(Иногда
уравнение связи интегрирующего звена
записывают в следующем виде
![]() ,
где
,
где
![]() ,
и, следовательно, передаточная функция
запишется как
,
и, следовательно, передаточная функция
запишется как
![]() .)
.)
Дифференцирующее идеальное звено.
Уравнение
связи имеет следующий вид
![]()
П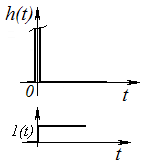 ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
![]() .
.
Данное звено не пропускает сигналы, т.е. и xвых = 0 и только в момент времени t = 0 появления входного воздействия имеет место импульс выходного сигнала.
Передаточная
функция звена имеет следующий вид
![]()
Дифференцирующее реальное звено.
Уравнение
связи имеет следующий вид
![]()
П ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
ри
единичном ступенчатом воздействии
xвх
= 1(t)
переходный процесс описывает следующее
выражение
![]() .
.
Передаточная
функция звена имеет следующий вид
![]() .
.
Следовательно,
это звено можно представить как
последовательное соединение инерционного
звена первого порядка (с передаточной
функцией
![]() )
и дифференцирующего идеального звена
с коэффициентом усиления равным 1 (с
передаточной функцией
)
и дифференцирующего идеального звена
с коэффициентом усиления равным 1 (с
передаточной функцией
![]() .)
.)
Откуда выражение для общей передаточной функции примет вид
![]() .
.
Данное звено не пропускает сигнал. При появлении входного сигнала он поступает на инерционное звено первого порядка и в момент времени t = 0 выходной сигнал возрастает до величины k/T. Далее он поступает на дифференцирующее идеальное звено и поэтому резко асимптотически уменьшается, стремясь к оси абсцисс.
Запаздывающее звено.
Уравнение
связи имеет следующий вид
![]()
где – время запаздывания.
При единичном ступенчатом воздействии xвх = 1(t)
переходный процесс описывает следующее выражение h(t) =1 (1-) .
П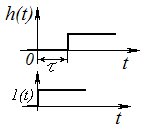 ри
прохождении через звено сигнал не меняет
своего значения и формы, только сигнал
выхода отстает от входного на отрезок
времени .
(Пример - длинный трубопровод.)
ри
прохождении через звено сигнал не меняет
своего значения и формы, только сигнал
выхода отстает от входного на отрезок
времени .
(Пример - длинный трубопровод.)
Передаточная
функция звена имеет следующий вид
![]() .
.
Если в передаточной функции заменить комплексную переменную р на j, то выражение оно будет выглядеть как
![]() по
формуле Эйлера
= cos
jsin
.
по
формуле Эйлера
= cos
jsin
.
Откуда Re() = cos и Im ()=-sin . Тогда
![]()