

6.4. Реализация корректирующих устройств
 Передаточная
функция параллельного
звена может быть реализована с помощью
схемы, состоящей из двух звеньев.
Передаточная
функция параллельного
звена может быть реализована с помощью
схемы, состоящей из двух звеньев.
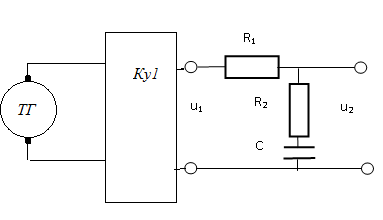
Первое звено – идеальное дифференцирующее, которое реализуется с помощью тахогенератора с передаточной функцией: .
 Второе
звено:
.
Второе
звено:
.
Оно реализуется четырехполюсником, и ему соответствует передаточная функция
 ,
,
где
![]() с,
с,
![]() .
.
Откуда
![]() .
.
Примем
![]() мкФ,
тогда
мкФ,
тогда
![]() Мом.
Мом.
Из
условия
![]() определим
определим
 кОм.
кОм.
Чтобы
не изменить общий коэффициент усиления,
последовательно со звеном нужно включить
усилитель с коэффициентом усиления
![]() .
.
Результирующая передаточная функция:
 .
.
Должно
выполняться неравенство
![]() .
.
П оследовательное
корректирующее звено реализуется
четырехполюсником.
оследовательное
корректирующее звено реализуется
четырехполюсником.
Ему соответствует передаточная функция
 ,
,
где
 с,
с,
![]() с,
с,
 .
.
Параметры
четырехполюсника определяются аналогичным
образом, и последовательно со звеном
для сохранения коэффициента усиления
контура включается усилитель с
коэффициентом усиления
![]() .
.
Примем
мкФ,
тогда
![]() Мом.
Мом.
Из условия определим
 кОм.
кОм.
Результирующая передаточная функция:

 .
.
Должно
выполняться неравенство
![]() .
.
Т.е.
 .
.
7. Построение точных лчх скорректированной системы с помощью программы MatLab

 Рисунок
7.1 - Схемы системы в программе MATLAB
Рисунок
7.1 - Схемы системы в программе MATLAB

Рисунок 7.2 - ЛЧХ скорректированной системы


Рисунок 7.3 - ЛЧХ внутреннего контура
На рисунке 7.2 приведены точные логарифмические частотные характеристики разомкнутой скорректированной системы LС(ω) и φС(ω), которые показывают, что система имеет запас устойчивости по фазе γ =70O, следовательно, из определения критерия Найквиста, система устойчива.
На рисунке 7.3 приведены точные логарифмические частотные характеристики внутреннего контура системы LВК(ω) и φВК(ω), которые показывают, что система имеет запас устойчивости по фазе γ =40O, следовательно, из определения критерия Найквиста, система устойчива.
8. Расчёт переходного процесса путём моделирования схемы (с использование системы Matlab)

Рисунок 8.1 - Схемы системы в программе MATLAB
 Для
схемы, изображенной на рисунке 8.1,
получена переходная функция системы:
Для
схемы, изображенной на рисунке 8.1,
получена переходная функция системы:

Рисунок 8.2 - Переходный процесс при единичном ступенчатом сигнале
Показатели качества переходного процесса равны:
перерегулирование σ=10.5 % < 29%
время регулирования tр=1.1 с < 1.2c
8.1 Расчет реакции системы на эквивалентный гармонический входной сигнал (с использование системы Matlab)

Рисунок 8.3 - Схемы системы в программе MATLAB
 Для
схемы, изображенной на рисунке 8.3,
смоделируем реакцию
системы на эквивалентный гармонический
входной сигнал
Для
схемы, изображенной на рисунке 8.3,
смоделируем реакцию
системы на эквивалентный гармонический
входной сигнал
![]() :
:

Рисунок 8.4 - Результаты моделирования в системе MatLab
 Из
осциллограммы, представленной на рисунке
8.4, определяем максимальное значение
ошибки: ε=2,7 градуса, это меньше допустимого
εдоп=2,9
градуса. Таким образом, показатели
качества синтезированной системы
удовлетворяют заданию.
Из
осциллограммы, представленной на рисунке
8.4, определяем максимальное значение
ошибки: ε=2,7 градуса, это меньше допустимого
εдоп=2,9
градуса. Таким образом, показатели
качества синтезированной системы
удовлетворяют заданию.