

5.4 Построение высокочастотного участка желаемой лачх
Высокочастотная часть ( > 3) желаемой ЛАХ не оказывает особого влияния на динамические свойства системы на рабочей частоте. Поэтому для упрощения корректирующего устройства рекомендуется выбирать наклоны ВЧ- асимптоты и сопрягающие частоты по возможности такими же, как в характеристике неизменяемой части системы Lн ().
Сопрягающая частота:
![]() (находим
из условия:
(находим
из условия:
![]() )
)
 Проведём
сопрягающую асимптоту. Выбираем наклон
ВЧ –продолжим наклон -20дБ/дек.
Проведём
сопрягающую асимптоту. Выбираем наклон
ВЧ –продолжим наклон -20дБ/дек.

Рисунок 5.3 - Желаемая ЛАЧХ

Рисунок 5.4 - ЛАЧХ корректирующего звена
6. Синтез совместно вводимых последовательного и параллельного корректирующих устройств
При некоторых сочетаниях параметров системы введение одного параллельного корректирующего устройства не может обеспечить требуемую коррекцию системы. Причины заключаются в противоречии между параметрами исходной системы и высокими требованиями к динамическим и статическим характеристикам проектируемой системы.
В этом случае необходимо вводить совместно последовательное и параллельное корректирующие звенья. Выбор звеньев осуществляется в следующей последовательности.
Проверка условия возможности коррекции только параллельным звеном.
Выбор последовательного корректирующего звена.
Выбор параллельного корректирующего звена.
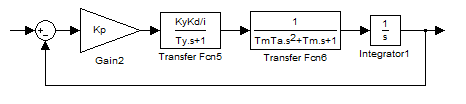
Рисунок 6.1 – Система без корректирующих звеньев
6.1. Проверка условия возможности коррекции одним параллельным корректирующим звеном
Для
проверки необходимо построить ЛАЧХ
внутреннего контура в соответствии с
условием
![]() .
.
Путем
графического вычитания находим на рис.
6.1, что в области частоты среза
![]() с-1
не выполняется условие:
с-1
не выполняется условие:
![]() .
.
Следовательно, нельзя выполнить коррекцию системы только параллельным корректирующим звеном.
6.2. Выбор последовательного корректирующего звена
Для
того, чтобы «поднять» характеристику
включим последовательно корректирующее
звено с передаточной функцией
 .
.
 Постоянные
времени примем равными
Постоянные
времени примем равными
![]() с,
с,
![]() с.
Постоянную времени целесообразно
уменьшить до
с.
Постоянную времени целесообразно
уменьшить до
![]() с.
с.

Рисунок 6.2 – Система с последовательным корректирующим звеном
Суммируя
характеристики
![]() ,
получим новую характеристику
нескорректированной системы
,
получим новую характеристику
нескорректированной системы
![]() .
.
Построим
новую характеристику внутреннего
контура в соответствии с выражением
![]() .
Из характеристики
.
Из характеристики
![]() на рис. 6.1 видно, что в области частоты
среза
с-1
выполняется условие
на рис. 6.1 видно, что в области частоты
среза
с-1
выполняется условие
![]() дБ,
следовательно, можно синтезировать
параллельное корректирующее звено.
дБ,
следовательно, можно синтезировать
параллельное корректирующее звено.

Рисунок 6.3 – начальная и новая ЛАЧХ внутреннего контура
6.3. Выбор параллельного корректирующего звена
Наиболее
целесообразно охватить обратной связью
звенья, образующие неизменяемую часть
системы, поэтому охватим обратной связью
все звенья за исключением
![]() .
.
Следует,
что передаточная функция неохваченной
части системы соответствует
 .
.
Для
упрощения технической реализации
корректирующего звена изменим наклон
![]() на ВЧ участке и сделаем его
на ВЧ участке и сделаем его
![]() дБ/дек.
дБ/дек.
ЛАЧХ параллельного корректирующего звена определяется выражением:

![]() .
.
По характеристики звена определим его передаточную функцию:
 .
.
Корректирующее звено можно представить в виде двух звеньев: идеального дифференцирующего звена с передаточной функцией
![]()
и
упругого дифференцирующего звена с
передаточной функцией
 .
.

Рисунок 6.4 – Система с последовательным и параллельным корректирующими звеньями
Параметры
звеньев определим по характеристике
![]() .
.
Продолжим
НЧ часть характеристики с наклоном
![]() дБ/дек.
В точке «В» справедливо
дБ/дек.
В точке «В» справедливо
![]() ,
откуда
,
откуда
![]() .
.
Для
звена с передаточной функцией
![]() определим:
определим:
![]() с,
с.
с,
с.

Рисунок 6.5 –ЛАЧХ параллельного корректирующего звена