

3.2.2. Метод билинейного преобразования
Билинейное z-преобразование использует следующую замену:
 (3.5)
(3.5)
На рис.3.3 показано, каким образом s-плоскость отображается в z-плоскость.
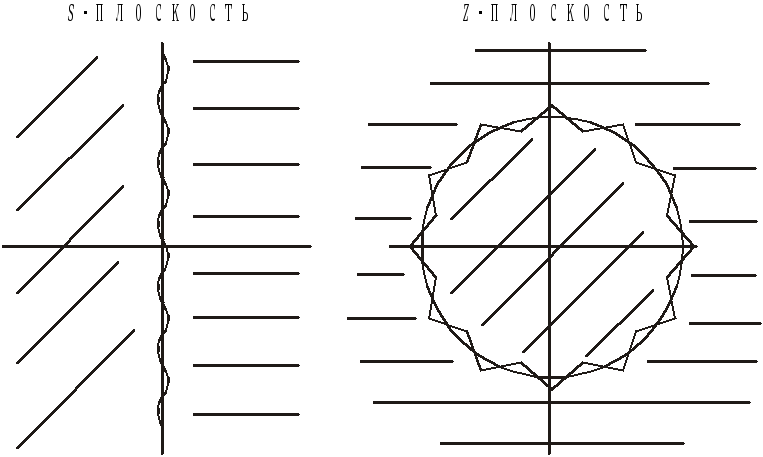
Рис. 3.3
Вся ось jW из s-плоскости отображается в единичную окружность на z-плоскости, левая полуплоскость s отображается в единичный круг, а правая полуплоскость s – в область, расположенную вне единичного круга на z-плоскости.
Из формулы (3.5) найдем выражение для z:
 .
.
При s = jW получим:
 .
.
Отсюда видно, что
![]() .
При
.
При![]() = 0 имеемz =
1 и при W =
¥ z
= –1, в промежутке z
монотонно меняется от 0 до
= 0 имеемz =
1 и при W =
¥ z
= –1, в промежутке z
монотонно меняется от 0 до
![]() .
Подставив в формулу
s =
s + jW,
получим:
.
Подставив в формулу
s =
s + jW,
получим:
 .
.
При s
< 0 (для левой полуплоскости)
![]() ,
т. е. точки расположены внутри единичной
окружности.
,
т. е. точки расположены внутри единичной
окружности.
При билинейном преобразовании передаточная функция цифрового фильтра H(z) рассчитывается с помощью алгебраической подстановки, т. е.
 .
.
Из этого соотношения видно, что порядки знаменателей функций H(z) и H(S) совпадают, но порядки числителей могут различаться. Например, передаточная функция
![]()
имеет числитель нулевого порядка, а знаменатель – первого порядка. В то же время, получаемая методом билинейного преобразования функция равна

где и числитель и знаменатель 1-го порядка. Причиной этого является то, что H(S) имеет нуль на бесконечности (S = ¥), который при билинейном преобразовании отображается в точку z = –1.
Так как в единичную окружность
на z-плоскости
отображается вся ось
jW
из s-плоскости, то
эффекты, связанные с наложениями в
частотной характеристике цифрового
фильтра, характерные для метода
инвариантного преобразования импульсной
характеристики, в данном случае
наблюдаться не будут. Однако соотношение
между частотами аналогового фильтра
![]() и цифрового фильтра
оказывается нелинейным.
и цифрового фильтра
оказывается нелинейным.
Рассмотрим характер этой
нелинейности. Пусть в (3.5)
![]() и S
= jW
тогда
и S
= jW
тогда
или
откуда
 ;
;
При небольших w отображение почти линейно, однако для основной части частотной шкалы оно существенно нелинейно и значительно ограничивает область применения билинейного преобразования. Существует, правда, довольно большой класс фильтров, для которых частотная деформация может быть скомпенсирована. К ним относятся фильтры нижних частот, высоких частот, полосовые и режекторные. Эффекты нелинейности соотношения между частотными шкалами аналогового и цифрового фильтров удается учесть лишь в том случае, когда частотная характеристика аналогового фильтра имеет вид ступенчатой функции. Кроме того, при билинейном преобразовании ни импульсная, ни фазовая характеристики аналогового фильтров не будут совпадать.
3.3. Преобразования полосы частот для аналоговых фильтров
Существует много различных методов преобразования фильтров нижних частот с частотой среза, равной 1 рад/с, в другой фильтр нижних частот (имеющий другую частоту среза), а также в фильтр верхних частот, полосовой или режекторный. Перечислим наиболее простые преобразования.
Фильтр нижних частот фильтр нижних частот:
 .
.
Фильтр нижних частот фильтр верхних частот:
![]() .
.
Фильтр нижних частот полосовой фильтр:
 .
.
Фильтр нижних частот режекторный фильтр:
 .
.
Здесь Wl – нижняя частота среза, Wu – верхняя частота среза.