

Кинематические схемы якорно-швартовных устройств
Кинематическая схема брашпиля
Электродвигатель 1 ( рис. 157 ) через предохранительную фрикционнуюмуфту 2
соединён с червячным редуктором 11 и промежуточным валом 12. Вращение этого ва-
ла через пару шестерней 13 передаётся на главный вал 14, на котором находятся швартов-
ные барабаны 9.

Рис. 157. Кинематическая схема брашпиля
С главным валом при помощи двух одинаковых пар зубчатых колёс 10 соединены 2
грузовых вала 3. На них могут свободно вращаться пятиугольные якорные звёздочки ( цеп
ные барабаны ) 5, выполненные заодно с тормозными колёсами 7.
Эти колёса охвачены лентами 8 ленточного тормоза с ручным винтовым приводом 6.
Цепные барабаны при помощи кулачкового устройства 4 с ручным приводом могут присоединяться к грузовым валам 3 и вращаться вместе с ними.
На рис. 157 правый барабан сообщён с зубчатым колесом, а левый отсоединён, по-
этому брашпиль может перемещать только правый якорь. Таким образом, электродвига-
тель брашпиля может перемещать оба якоря поочерёдно или одновременно.
Редуктор брашпиля может быть как самотормозящимся, так и несамотормозящим-
ся. Во втором случае брашпиль должен иметь электромагнитные дисковые тормоза, затор
маживающие привод при обесточивании судна или срабатывании защит в схеме электро-
привода.
Отдача якоря происходит под действием его собственного веса, скорость травления
регулируется ленточным тормозом.
Современные суда имеют гидравлические устройства управлениял ленточными
тормозами, что позволяет отдавать якорь дистанционно ( из рулевой рубки ). При этом контролируется длина вытравленной якорь-цепи и скорость её травления.
Весь механизм брашпиля и исполнительный электродвигатель расположены на от-
крытой палубе, что усложняет обслуживание и повышает уязвимость.
Кинематическая схема якорно-швартовного шпиля
Этого недостатка лишены шпили, у которых на открытой палубе расположены толь
ко якорная звёздочка и барабан, а электродвигатель с редуктором находятся ниже палубы полубака в закрытом помещении ( рис. 158 ).
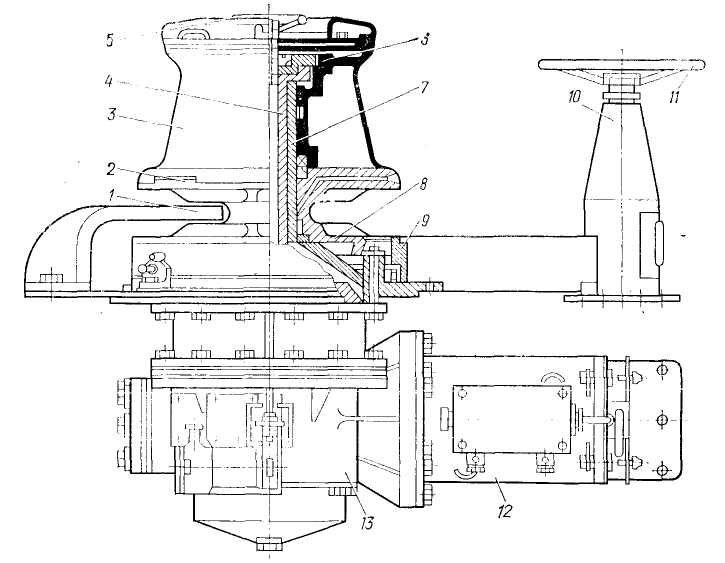
Рис. 158. Якорно-швартовный шпиль:
1 – скоба-отбойник; 2 – кулачковая муфта; 3 – турачек; 4 – пустотелый вал;
5 – маховик включения звездочки; 6 – зубчатая муфта; 7 – палубный стакан; 8 – цепная звездочка; 9 – ленточный тормоз; 10 – кнопка управления ленточным тормозом; 11 – маховик; 12 – электродвигатель; 13 – червячная передача
Нагрузочные диаграммы якорно-швартовных устройств Нагрузочной диаграммой электропривода называют зависимость мощности, тока или момента электродвигателя от времени.
Нагрузочная диаграмма электропривода брашпиля – это зависимость момента на валу электродвигателя от времени ( рис. 160 ).
Рассмотрим нагрузочные диаграммы электропривода брашпиля при подъеме 1-го якоря с полной расчётной глубины стоянки ( рис. 160,а ) и 2-х якорей с половинной рас-
чётной глубины ( рис. 160,б ).
Режим подъёма одного якоря.
При стоянке судна на якоре один конец якорной цепи с якорем лежит на грунте, а
второй проходит через клюз и якорную звёздочку в цепной ящик.
Провисающая в воде часть цепи “а” находится под действием внешних сил, дейст-
вующих
на судно: силы ветра F![]() и
силы течения воды F
и
силы течения воды F![]() .
Чем больше эти силы, тем сильнее натянута
якорная цепь.
.
Чем больше эти силы, тем сильнее натянута
якорная цепь.
Увеличение натяжения цепи вызывает подъём части цепи с грунта, при этом увели-
чивается длина её провисающей части.
Процесс снятия судна с якоря делится на 4 стадии ( рис. 159 ).
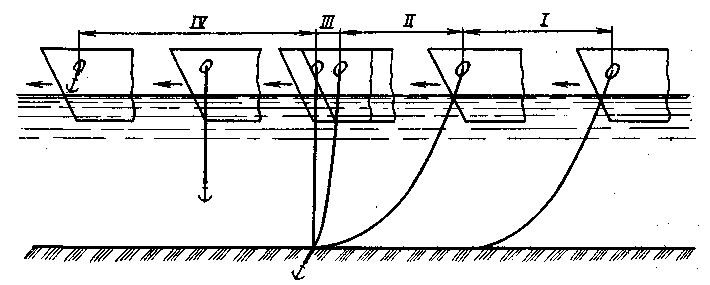
Рис. 159. Процесс снятия судна с якоря
В стадии 1 брашпиль выбирает цепь, втягивая её звенья в клюз. При этом судно
под действием усилия в цепи, созданного работой электродвигателя брашпиля, движется с небольшой скоростью к месту залегания якоря.
Количество звеньев, втягиваемых в клюз, равно количеству звеньев, поднятых с
грунта, поэтому форма провисающей части цепи «б» не изменяется. Значит, сила натяже-
ния цепи у входа в клюз и момент М на валу электродвигателя на этой стадии не изме-
няются.
Стадия 1 заканчивается, когда с грунта будет поднято последнее свободно лежащее
звено цепи. На этой стадии скорость выбирания якоря увеличивается, как правило, от 9 до 12 м / мин.
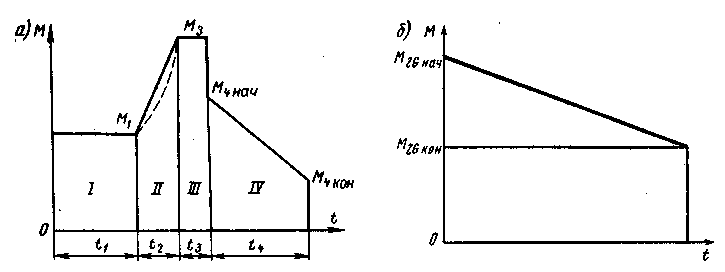
Рис.160. Нагрузочные диаграммы электропривода брашпиля при подъеме одного ( а ) и двух ( б ) якорей
В течение стадии 2 брашпиль продолжает втягивать цепь в клюз, а судно продол-
жает двигаться практически с неизменной скоростью вследствие приобретённой инерции.
Натяжение цепи увеличивается и её форма в конце стадии провисающей части це-
пи «в» приближается к прямой.
В конце стадии 2 двигатель может остановиться, если момент на валу электродвига
теля недостаточен для отрыва якоря от грунта. Двигатель при этом переходит в режим стоянки под током, длительность которого ограничена Правилами Регистра до 30 с.
На этой стадии момент на валу
электродвигателя М![]() увеличивался от значения
увеличивался от значения
М
до значения М![]() .
.
На стадии 3 двигатель выбирает слабину цепи, образующуюся вследствие движе-
ния судна по инерции. Значение момента на валу электродвигателя практически не изме-
няется, т.е. равно М .
В конце стадии 3 судно проходит над местом залегания якоря и отрывает его от
грунта.
В результате момент электродвигателя
скачкообразно уменьшается от значения
М
до значения М![]() .
.
На стадии 4 двигатель выбирает свободно висящую цепь, длина которой, находя
щаяся
в воде, непрерывно уменьшается. Момент
на валу электродвигателя постепенно
уменьшается от значения М
до
значения М![]() ,
при котором цепь полностью втянута в
клюз.
,
при котором цепь полностью втянута в
клюз.
Двигатель при этом надо отключить от сети.
На этой стадии скорость выбирания якоря уменьшается, как правило, от 12 м/мин
до 3 м/мин.
Режим подъёма 2-х якорей
В этом режиме якоря предварительно оторваны от грунта, а длина цепи в воде рав
на половине расчётной глубины стоянки.
Начальный момент на валу электродвигателя, обусловленный суммарным весом
якоря и цепи,
составляет М![]() ( рис. 160, б ).
( рис. 160, б ).
После включения электродвигателя происходит плавный подъём якоря, момент
электродвигателя
уменьшается от значения М
до значения М![]() .
.
Швартовный режим
В этом режиме усилие на тросе может изменяться от нуля ( слабина троса ) до номи
нального значения.
Кроме того, при рывках тяговое усилие в тросе может достигать значений, когда
происходит остановка механизма. Однако продолжительность перегрузки обычно не пре-
вышает 4…7 с.
Работа в швартовном режиме контролируется членами экипажа, и скорость на бара
бане может изменяться в пределах 7,2…18 м/мин.
Исходные нормативные нагрузки якорно-швартовных устройств
Работа якорного электропривода характеризуется следующими величинами:
тяговым усилием, развиваемым на якорной звездочке, которое зависит от массы якоря, калибра и длины якорной цепи, вытравленной за клюз и провисающей в зависимости от глубины стоянки;
усилиями, создаваемыми ветром и течением и действующими на судно во время его съемки с якоря;
3. скоростью выбирания якорь-цепи;
4. продолжительностью рабочего периода, которая зависит от общей длины вытравленной якорной цепи при съемке судна с якоря.
К исходным нормативным нагрузкам относят:
нормы якорного снабжения судов;
расчетные нагрузки на якорной звездочке при подъеме одного и двух якорей;
продолжительность работы и скорость выбирания якорных и швартовных канатов.