

Радиально-поршневые насосы регулируемой подачи
Радиально-поршневые насосы часто называют насосами Холла, по имени изобрета-
теля этого вида насоса переменной подачи
Устройство насоса Холла показано на рис. 264.
Рис. 264. Принцип действия радиально-плунжерного насоса регулируемой подачи ( насоса Холла ):
1 – барабан; 2 – нижняя полость насоса; 3 – плунжер; 4 – цилиндр; 5 – верхняя полость насоса; 6 – ползун; 7 – корпус насоса; 8 – манипулятор;
а ) исходное положение барабана;
б ) барабан смещен влево, полость 5 нагнетательная, полость 2 всасывающая;
в ) барабан смещен вправо, полость 2 нагнетательная, полость 5 всасывающая.
В неподвижном корпусе насоса 7 асинхронным двигателем вращается звездообразный ротор. Он состоит из 5…11 радиально расположенных цилиндров. На рис. 10.5 показан ротор с семью цилиндрами 4.
Внутри каждого цилиндра есть плунжер ( поршень ) 3, связанный шарнирно с ползуном 6. При вращении ротора ползуны скользят по внутренней поверхности барабана 1.
Этот барабан не вращается, но может перемещаться влево или вправо при помощи специального рычага – манипулятора 8. При этом ось ротора остаётся на месте ( напомним, что ротор насоса вращается приводным асинхронным двигателем ) .
Полость ротора разделена перегородкой на верхнюю 5 и нижнюю 2 части. Каждая часть соединена магистралями с трубопроводами «а» и «б» рулевой гидравлической маши
ны ( см. выше рис. 259, Принципиальная схема 4-плунжерной рулевой машины ).
Принцип действия насоса Холла
В исходном состоянии ось ротора и ось барабана совпадают ( рис. 264, а ).
Смещение оси барабана 1 по отношению к оси ротора называют эксцентриситетом и обозначают греческой буквой ε ( эпсилон ). На практике ε = 15…20 мм.
Поскольку в исходном состоянии оси ротора и барабана совпадают, ε = 0.
При этом плунжеры 3 вращаются вместе с цилиндрами 4, не перемещаясь радиально внутри последних.
Объём масла внутри каждого из цилиндров 4 одинаков, поэтому давление масла в полостях 5 и 2 равно нулю. На рис. 249 эти объемы, заполненные маслом, зачернены.
Если при помощи манипулятора 8 сместить барабан 1, например, влево ( рис. 264, б ), то возникнет эксцентриситет ε > 0.
При этом плунжеры цилиндров, находящиеся выше горизонтальной оси ( изображена пунктиром ), станут перемещаться внутри своих цилиндров по направлению к центру ротора, вытесняя масло внутрь верхней полости 5 и, далее, в магистраль «а». Эта магистраль станет нагнетательной.
В то же время плунжеры цилиндров, расположенные ниже горизонтальной оси, под действием центробежных усилий, станут перемещаться в направлении от центра ротора, а образующиеся под ними пустоты станут заполняться маслом из нижней полости 2.
В результате в этой полости давление упадёт, поэтому магистраль «б» станет всасывающей.
Вследствие этого рулевая машина начнёт поворачивать перо руля в направлении против часовой стрелки.
Если манипулятором сместить барабан 5 вправо ( рис. 264, в ), то, рассуждая аналогично, можно показать, что полость 5 станет всасывающей, а полость 2 – нагнетательной.
При этом руль повернётся в обратную сторону.
Чем больше эксцентриситет, тем больше ход плунжеров и тем больше объём масла ( подача ), перемещаемого в цилиндрах насоса и магистралях рулевой машины. Значит, тем больше скорость перекладки руля.
Из сказанного следует, что насос Холла имеет две особенности:
1. изменение направления перемещения барабана приводит к перекладке руля на
другой борт ( реверсу );
2. изменение величины смещения барабана ( эксцентриситета насоса ) приводит к
изменению скорости перекладки руля.
Для дистанционного управления манипулятором применяют электромеханические или электрогидравлические передачи, называемые исполнительным механизмом ( ИМ ).
При ручном ( аварийном ) управлении манипулятор перемещают вручную при помощи рукоятки снаружи корпуса ИМ, по командам с мостика. Угол поворота пера руля контролируют по указателю положения пера руля, расположенному в румпельном отделении ( второй указатель находится в рулевой рубке на мостике )
Аксиально-поршневые насосы регулируемой подачи
Аксиально-поршневой насос регулируемой подачи изображен на рис. 265.
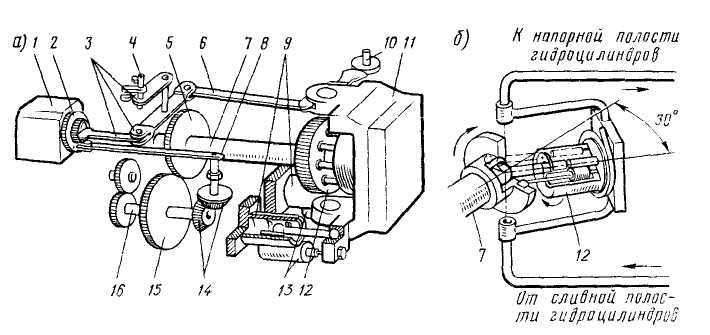
Рис. 265. Аксиально-поршневой насос регулируемой подачи:
а – кинематическая схема; б – схема работы насоса
На рис. 265 изображены:
золотниковая коробка;
втулка золотниковой коробки;
рычажная система;
валик управления;
шестерня;
рычаг обратной связи;
вал насоса;
эксцентрический вибратор;
силовые цилиндры ( 2 шт. );
вал управления;
поворотная люлька насоса;
блок цилиндров;
нуль-установитель;
коническая пара шестерней;
зубчатое колесо;
приводной вал насоса.
Гидравлическая система аксиально-поршневого насоса ( рис. 265, а) включает следующие элементы: основной насос регулируемой подачи; шестеренный насос; золотниковую коробку и гидравлический усилитель, включающий в себя силовые цилиндры и рычажную систему, клапанное устройство, состоящее из двух подпиточных (сливного и предохранительного) клапанов; нуль-установители; распределительную коробку и фильтр.
Регулирующим органом насоса является люлька.
Принцип действия указанной системы следующий.
Вал насоса 7 , получая вращение от ЭД, передает его через кардан блоку 12 с цилиндрами, а также через шестерню 5 зубчатому колесу 15, надетому на приводной вал 16 шестеренного насоса.
Рабочая жидкость, нагнетаемая шестеренным насосом, расходуется на восполнение ее утечек из замкнутого объема: насос - магистральные трубопроводы – гидроцилиндры рулевой машины.
Шестеренный насос всасывает рабочую жидкость из корпуса основного насоса, служащего одновременно резервуаром рабочей жидкости, и нагнетает ее в систему через фильтр.
После фильтра рабочая жидкость направляется по трубопроводам к распределительной коробке, воздействует на переключающий золотник и открывает себе доступ в нуль-установители 13 и в золотниковую коробку 1 гидроусилителя, а избы-
ток рабочей жидкости сливается через сливной клапан.
Нуль-установители 13 предназначены для вывода люльки насоса в среднее (нулевое) положение при включении насоса и для удержания люльки в этом положе-
нии, пока насос не работает. Это нужно для того, чтобы последующее включение проводилось при среднем положении люльки (это уменьшает пусковую мощность ЭД ).
При поступлении рабочей жидкости в цилиндры нуль-установителей штоки их убираются, сжимая пружины, что дает возможность люльке 11 насоса свободно поворачиваться на цапфах на угол 30º в обе стороны от среднего положения при помощи гидравлического усилителя мощности и вручную ( силовое управление насосом ).
Гидроусилитель состоит из золотниковой коробки 1, двух силовых цилиндров 9 и рычажной системы 3. При смещении золотника в ту или иную сторону открывается доступ рабочей жидкости в один из силовых цилиндров. Золотник смещают поворотом вала управления 10 и рычажной системой.
Под давлением рабочей жидкости поршень, находящийся в одном силовом цилиндре, перемешается, например, влево и при помощи шатуна поворачивает люльку 11 насоса. Одновременно с этим поршень второго силового цилиндра перемещается поворачивающейся люлькой вправо и вытесняет рабочую жидкость из полости цилиндра через золотниковую коробку в корпус насоса.
При этом рычаг 6 обратной связи возвращает золотник в среднее положение, доступ рабочей жидкости в силовой цилиндр прекращается и люлька останавливается.
Поэтому, чтобы поставить люльку на нужный угол, надо повернуть валик 4 управления на тот же угол (передаточное число рычажной системы равно единице).
Для более точной установки валика управления втулке 2 золотниковой коробки
сообщена осевая вибрация, осуществляемая при помощи эксцентрикового вибратора 8, получающего вращение от вала 16 шестеренного насоса через коническую пару 14.
Когда люлька насоса занимает среднее положение, то вращение вала 7 насоса не вызывает возвратно-поступательного движения поршней в цилиндрах 12, и подачи рабочей жидкости в гидроцилиндры привода рулевой машины не происходит.
Поворот люльки насоса создает наклон оси блока цилиндров 12 к оси вала 7 ( рис. 265, 6), и при его вращении поршни, находящиеся в цилиндрах блока, начинают совершать возвратно-поступательное движение. За один оборот вала насоса каждый поршень делает один ход вперед и один назад.
Поршни, выходя из цилиндров, всасывают рабочую жидкость в цилиндры, а двигаясь внутрь, нагнетают из цилиндров.
Перемена направления движения поршня происходит в момент нахождения его в горизонтальной диаметральной плоскости блока цилиндров. Поршни, находящиеся по одну сторону этой плоскости, будут нагнетать рабочую жидкость в гидроцилиндры рулевой машины, а поршни, находящиеся по другую сторону, всасывать.
При отклонении люльки в другую сторону поршни гидроцилиндров рулевой ма-шины будут перемещаться в обратном направлении, так как сторона всасывания и сторона нагнетания меняются местами и направление перекладки руля изменяется.
Угол отклонения люльки, зависящий от угла поворота валика 4 управления, определяет подачу насоса и скорость перекладки руля. С увеличением угла поворота возрастают подача насоса и скорость перекладки руля.
Валик поворачивают прибором ИМ ( исполнительный механизм ), установленным на корпусе насоса и входящим в комплект аппаратуры электрической си
стемы управления.
Прибор получает сигнал на поворот валика насоса при задании угла перекладки с пульта управления.
Сигнал обратной связи, пропорциональный углу поворота руля от РД, установленного на приводе к баллеру, поступает в пульт системы управления со знаком, противоположным знаку сигнала задания.
В результате суммирования прямого и обратного сигналов валик насоса, повернутый на тот или иной угол при задании, будет возвращен в среднее нейтральное положение при подходе руля к заданному углу поворота. При этом подача масла насосам, а следовательно, и перекладка руля прекращаются.
Работа системы управления более подробно рассмотрена ниже (при изложении принципа действия авторулевых ).
В приборах ИМ предусмотрена также рукоятка для возможности ручного аварий
ного (местного) управления, которое используют при выходе из строя аппаратуры дистанционной системы электрического управления, а также при опробовании рулевой машины из румпельного помещения. Таким образом, все управление рулем сводится к необходимому воздействию на люльку.
Как правило, электрогидравлические рулевые машины (исключая самые малые) имеют по 2 насоса. Один из них основной, другой- резервный. Все нормированные свойства рулевой системы обеспечиваются при работе одного насоса.
Вместе с тем в сложных условиях плавания с целью повышения надежности в действие могут быть введены 2 насоса. Так как подача при этом удваивается, то скорость перекладки руля при двух работающих насосах увеличивается.
В РЭП также иногда используются насосы постоянной подачи.