

11 Реле контроля неэлектрических величин
Основные сведения
Реле контроля неэлектрических величин или, иначе, механические реле предназна-
чены для контроля неэлектрических величин: давления, уровня, частоты вращения, изме-
нения направления вращения и т.п.
Реле контроля неэлектрических величин называются датчиками.
В настоящее время на смену механическим реле пришли электронные. Тем не ме-
нее на многих судах мирового флота механические реле по-прежнему применяются.
Реле давления
Реле давления предназначены для работы в сосудах, не сообщающихся с атмосфе- и реагируют на изменение давления рабочего тела ( воздуха, воды, масла и т.п. ) в систе-
ме.
Устройство реле давления показано на рис. 59.
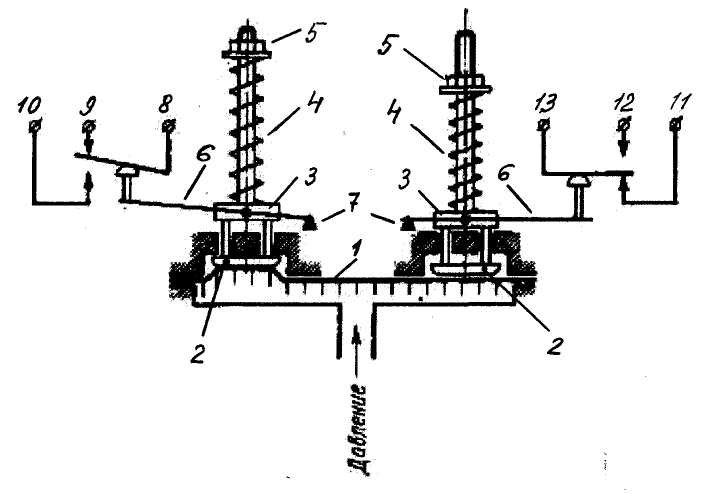
Рис. 59. Реле давления: 1 – мембрана; 2 – поршни; 3 – подушки; 4 – регулировоч-
ные пружины; 5 – регулировочные гайки; 6 – рычаги контактной системы; 7 – опоры контактной системы; 8, 13 – подвижные контакты; 9, 10, 11, 12 – неподвижные контакты
На рис. 59 изображено сдвоенное реле давления, состоящее из двух одинаковых ча-
стей – реле минимального давления ( слева ) и реле максимального давления ( справа ).
Давление рабочего тело через резиновую мембрану 1 передается на поршни 2, кото
рые упираются своими колонками в подушки 3. На подушки нажимают пружины 4, наде-
тые на вертикальные стержни. В верхней части стержней нарезана резьба и надеты регули
ровочные гайки 5.
С подушками связаны рычаги контактной системы. Один конец рычага ( правый
для левого реле ) лежит на опоре 7, второй ( левый ) через толкатель воздействует на под-
вижный контакт 8 микропереключателя ( микропереключатель – это выключатель с очень малым ходом подвижных частей ).
При изменении давления, например, увеличении, оба поршня с подушками переме-
щаются вверх, вследствие чего рычаги 6 контактной системы станут поворачиваться – на
левом реле по часовой стрелке, на правом – против. В результате подвижный контакт 8
будет оставаться замкнутым с контактом 9, а подвижный контакт 13 разомкнется с непод-
вижным 11. Поскольку пара контактов 13 – 11 находится в цепи катушки линейного кон
тактора двигателя, последний отключится и остановится.
При понижении давления происходит обратный процесс. При снижении давления до минимального контакт 8 замыкается с контактом 10, в результате чего двигатель вклю-
чается.
Из сказанного следует, что правое реле – это реле максимального давления, левое – минимального. Это же подтверждает положение регулировочных гаек 5 – левая гайка находится вверху стержня, поэтому левая регулировочная пружина сжата слабо. В то же
время правая гайка опущена ниже левой, т.е. сильней зажата. Поэтому правая регулировоч
ная пружина зажата сильней, чем левая.
Поэтому переключение контактов 8 и 9 будет происходить в диапазоне малых дав-
лений, а контактов 13 и 11 – в зоне больших.
Следует отметить, что мембрана 1 выполняет две функции:
через нее передается давление рабочего тела на остальную часть реле;
она служит для предотвращения проникновения воды, масла, воздуха внутрь
корпуса реле.
Промышленные типы реле давления
Промышленность выпускает разные типы реле давления. На судах широко приме
няются сдвоенные реле давления типа РДК-57 ( Р – реле, Д – давления, К – комбинирован
ное ).
При помощи этого реле на судах контролируют давление воздуха, воды и масла.

Рис. 60. Реле давления типа РДК-57: 1 – корпус реле; 2 – поршень; 3 – регулировоч-
ные гайки; 4 – кожух; 5 - регулировочные пружины; 6 – микропереключатель; 7 – стер-
жень; 8 – подушка; 9 – мембрана
В корпусе реле размещены два одинаковых реле – максимального и минимального давления ).
Устройство реле показано на рис. 60.
В корпусе 1, закрытом кожухом 4, находятся две мембраны 9 ( на рис. 60 видна од-на ). К ним снизу подведена трубка, соединенная с сосудом, в котором давление может из-
меняться.
Сверху к мембранам прилегают два поршня 2, упирающиеся своими колонками в подушки 9. На подушки нажимают две пружины 5, надетые на стержни 1. Сжатие пружин регулируется гайками 3.
При увеличении давления в системе оба поршня приподымаются вверх, вследствие чего контакты микропереключателя 6 максимального давления размыкаются, отключая насос или компрессор.
При снижении давления оба поршня опускаются вниз, вследствие чего контакты
микропереключателя минимального давления замыкаются, включая насос или компрес-
сор.
Следует отметить, что замыкание и размыкание контактов одного и того же микро-
переключателя происходит при разных значениях давления. Так, на одном из судов были
получены такие результаты:
1. реле минимального давления замыкало контакты при Р = 2кгс / см и размыка-
ло при давлении Р = 2, 5 кгс / см ( разница – 0,5 кгс / см );
2. реле максимального давления размыкало контакты при Р = 4 кг*с / см и замы-
кало при давлении Р = 3,6 кгс / см ( разница – 0,4 кгс / см );
. Недостаток данного реле состоит в том, что оно не имеет шкал с делениями для регулирования минимального и максимального давления. Для регулирования приходится использовать контрольный манометр со шкалой.
Принципиальная электрическая схема автоматического управления насосом заборт
ной воды с применением реле типа РДК-57 приведена в разделе “Электроприводы вспомо
гательных механизмов” данного пособия.
Технические характеристики реле РДК-57
Реле РДК-57 имеет следующие технические характеристики:
напряжение цепи управления:
постоянный ток.............................................................. 220В
переменный ток.............................................................. 380 В
крайние предельные значения давления.....0,25…12 кгс/см ( 0,025…1,2 МПа )
разница между максимальным и минимальным давлением ( не менее )
при давлении 0,065…0,18 МПа………………………...0,04 МПа
при давлении 0,18…0,8 МПа…………………………...0,07 МПа
при давлении 0,8…1,2 Мпа……………………………..0,1 Мпа
мощность размыкания контактов…………………….350 Вт.
Примечание: 1 кгс/см2 = 1 at ( техническая атмосфера ) = 0,1 МПа ( мегапаскаль )
Реле скорости
Реле скорости (частоты вращения ) предназначено для контроля частоты вращения. На судах отечественной постройки такие реле применяют в системах дистанцион
ного пуска вспомогательных и аварийного дизель-генераторов.
В зависимости от принцип действия, различают три типа реле скорости:
1. центробежное;
2. индукционное;
3. электронное.
Ниже рассматриваются первые два типа этих реле. Модификаций электронных
реле скорости довольно много, их схемы достаточно сложны и должны изучаться на кон-
кретном судне.
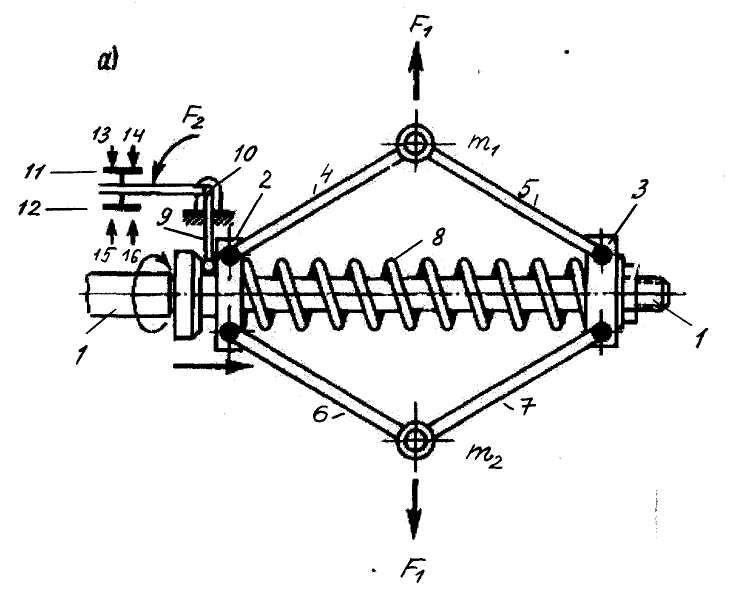
Рис. 61. Центробежное реле скорости: 1 – вал, 2,3 – втулки; 4, 5, 6, 7 – рыча
ги; 8 - пружина; 9 – рычаг; 10- ось рычага; 11, 12 – подвижные контакты, 13, 14, 15, 16 – неподвижные контакты
Принцип действия реле скорости основан
на применении центробежных сил F![]() ,
стремящихся отбросить вращающиеся
массы в направлении от оси вращения к
периферии
,
стремящихся отбросить вращающиеся
массы в направлении от оси вращения к
периферии
( наружу ). Поэтому данное реле называется центробежным.
На вращающемся валу 1 находятся муфты 2 и 3. Муфта 2 посажена на вал свобод-
но, муфта 3 жестко закреплена на валу при помощи гайки ( справа ).
К муфтам 2 и 3 шарнирно присоединены рычаги 4, 5, 6 и 7, образующие параллело-
грам. В местах соединения рычагов 4-5 и 6-7 находятся грузики массой m = m . На валу между втулками находится пружина 8.
В положении, показанном на рис.61, вал вращается с определенной скоростью, при которой Г-образный рычаг 9 воздействует на подвижные контакты 11 и 12 с силой F . При этом контакт 11 замыкает через себя неподвижные контакты 13 и 14. Контакты 15, 16 разомкнуты.
При увеличении скорости вала центробежные усилия F , действующие на грузики, возрастают, в результате форма параллелограма становится вытянутой. При этом подвиж-
ная муфта 2, сжимая пружину 8, перемещается вдоль вала вправо. Рычаг 9 поворачивается вокруг оси 10. При этом подвижный контакт 11 размыкает контакты 13 и 14, а контакт 12 – соединяет контакты 15 и 16.
Индукционное реле
Индукционное реле ( рис.62 ) предназначено для контроля скорости и направления вращения вала. Такие реле применяются как в схемах автоматического управления дизеля
ми и турбинами, так и ( реже ) в схемах торможения противовключением асинхронных короткозамкнутых двигателей.
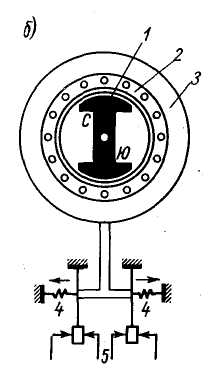
Рис. 62. Реле скорости и направления вращения: 1 – постоянный магнит; 2 – обмотка ротора; 3 – ротор; 4 – пружины; 5 – контактная система
Основной элемент реле – постоянный магнит с полюсами С и Ю, сидящий на валу.
Этот магнит помещен внутрь полого ротора 3 с короткозамкнутой обмоткой 2. Ротор свя-
зан с рычагом, управляющим подпружиненными подвижными контактами.
При вращении постоянного магнита к короткозамкнутой обмотке индуктируется э.д.с., под действием которой в обмотке возникает ток ротора. Взаимодействие этого тока и вращающегося магнитного потока полюсов С и Ю приводит к образованию электромаг-
нитного момента ротора. Ротор поворачивается и передает через рычаг усилие на контак-
ты 5, которые при достижении валом определенной скорости переключаются.
При изменении направления вращения вала ротор повернется в другую сторону, в результате контакты 5 переключатся в ином порядке.
Данное реле называют индукционным, т.к. принцип действия реле основан на ис-
пользования явления электромагнитной индукции ( если перемещать магнитное поле отно
сительно проводника, в последнем индуктируется э.д.с. либо, наоборот, если перемещать проводник в магнитном поле, в проводнике наводится э.д.с. ).
Реле уровня
Реле уровня предназначены для контроля уровня жидкости в ёмкостях, соединён-
ных с атмосферой.
Различают 3 вида реле уровня:
1. поплавковое;
2. индукционное;
3. конденсаторное ( с элементами электроники ).
Ниже рассматривается поплавковое реле уровня типа РП 52.

Рис. 63. Поплавковое реле уровня: 1 – поплавок; 2 – рычаг; 3 – крышка цистерны;
4 – подшипник; 5 – тяга; 6 – контактное устройство
Это реле предназначено для дистанционного автоматического включения ( отклю-
чения ) насосов цистерн пресной или забортной воды – при понижении уровня насос вклю
чается, при повышении – отключается.
Чувствительным ( к уровню воды ) элементом реле является пустотелый поплавок 1, закреплённый на конце рычага 2. Второй конец рычага соединен с пальцем, который может поворачиваться в подшипнике 4.
Подшипник смонтирован на основании, закрепленном на крышке цистерны 3, сквозь прорезь в которой пропущен рычаг. С пальцем рычага при помощи тяги 5 соединён валик контактного устройства 6, состоящего из двух микропереключателей.
При изменении уровня жидкости поплавок перемещается вверх или вниз, что в крайних положениях вызывает переключение контактов соответствующего микропереклю
чателя.
Недостатком реле этого типа является возможность ложного срабатывания при кач-
ке судна. Чтобы избежать таких срабатываний, в схемах управления электроприводами насосов используют дополнительное реле времени, задерживающие на 6…8 с включение насоса при изменении уровня при качке.