

Подготовка схемы к работе
Для подготовки схемы к работе подают напряжение на линейные провода L1, L2.
При этом образуются две цепи:
параллельной обмотки возбуждения : «+ L1» – параллельная обмотка возбужде
ния LМ1 – «- L2»;
катушки реле времени КТ1: «+ L1» – размыкающий контакт КМ1.4 – «- L2».
Двигатель возбуждается и готов к работе.
Реле КТ1 включается и размыкает свой контакт КТ1 в цепи катушек контакторов
ускорения КМ1 и КМ2.
Схема готова к работе.
Работа схемы
Для пуска двигателя нажимают кнопку SB1 «Пуск», через замкнувшийся контакт
которой включается линейный контактора КМ1.
Контактор КМ1 замыкает главные контакты КМ1.1 и КМ1.2 в цепи обмотки якоря двигателя, вследствие чего начинается пуск двигателя через обе ступени пускового рези-
стора R .
Кроме того, контактор КМ1 замыкает два вспомогательных контакта:
КМ1.3, который шунтирует кнопку SB1 «Пуск»;
КМ1.5, через который включается реле времени КТ2. Это реле мгновенно раз
мыкает контакт КТ2 в цеп катушки второго контактора ускорения КМ3.
Одновременно размыкается вспомогательный контакт КМ1.4, отключающий катуш
ку реле времени КТ1. С этого момента начинается выдержка времени реле КТ, обычно 1…2 сек.
По истечении выдержки времени реле КТ1 замыкает контакт КТ1, включая контак-
тор ускорения КМ2. Этот контактор имеет два контакта – главный КМ2.1 и вспомогатель-
ный КМ2.2
Контакт КМ2.1 замыкается, шунтируя первую ( левую ) ступень пускового резисто
ра, двигатель переходит на новую характеристику и продолжает разгоняться, имея в цепи обмотки якоря вторую ( правую ) ступень пускового резистора.
Контакт КМ2.2 размыкается, отключая катушку реле времени КТ2. С этого момен-
та начинается выдержка времени реле КТ2, обычно 1…2 сек.
Как только выдержка времени КТ2 закончится, контакт КТ2 замыкается и включа-
ется второй контактор ускорения КМ3.
Единственный контакт контактора КМ3.3 замыкается, шунтируя вторую ступень пускового резистора. Пуск закончен.
При изучении схемы надо обратить внимание на следующее: после нажатия кнопки
SB1 и включения контактора КМ1 реле времени КТ1 отключается ( из-за размыкания кон-
такта КМ1.4 ) , а КТ2 – включается ( вследствие замыкания контакта КМ1.5 ).
Автоматизация пуска и торможения 3-фазного асинхронного двигателя
Схема автоматического пуска асинхронного двигателя переключением обмот
ки статора со звезды на треугольник
Основные сведения
Пуск двигателя переключением со звезды на треугольник уменьшает пусковой ток в 3 раза. Поэтому этот способ пуска применяют для крупных асинхронных двигателей, прямое включение которых вызывают большие провалы напряжения судовой сети. К та-
ким относятся двигатели мощных насосов, компрессоров, тяжеловесных лебедок и кранов и др.
Недостатком способа является уменьшение пускового момента в 3 раза, поэтому его применяют в электроприводах, допускающих при пуске уменьшение рабочих парамет-
ров ( у компрессора – давления, у насоса – подачи и т. п. ). У этих механизмов мощность прямо пропорциональна третьей степени ( кубу ) скорости, поэтому при пуске, когда ско-
рость двигателя и механизма невелики, мощность, а значит, и ток двигателей малы.
Схема пуска
Схема пуска асинхронного двигателя переключением со звезды на треугольник
приведена на рис. 120.
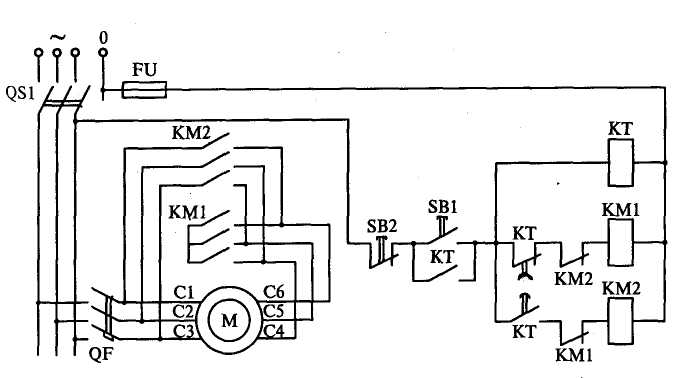
Рис. 120. Схема пуска асинхронного двигателя переключением со звезды на треугольник
Основные элементы схемы:
1. QS – рубильник;
2. QF - автоматический выключатель;
3. М - асинхронный электродвигатель ;
4. FU – предохранитель цепей управления;
5. SB1 – кнопка «Пуск»;
6. SВ2 - кнопка «Стоп»;
6. KТ - реле времени электромеханическое;
7. КМ1 – контактор нулевой точки «звезды»;
8. КМ2 – контактор «треугольника».
Выдержка времени электромеханического реле КТ начинается с момента подачи питания на катушку реле.
Подготовка схемы к работе
Для подготовки схемы к работе включают рубильник QS1 и автоматический выклю
чатель QF.
Схема готова к работе.
Работа схемы
Для пуска электродвигателя нажимают кнопку SВ1 «Пуск», после чего схема рабо
тает автоматически.
При нажатии кнопки SВ1 включаются реле времени КТ и контактор нулевой точки «звезды» КМ1. Последний соединяет в общую точку выводы С4, С5 и С6 обмотки стато-
ра.
Происходит пуск двигателя при соединении обмотки статора в «звезду»
С этого же момента начинается отсчет выдержки времени реле времени КТ.
Как только эта выдержка закончится, реле КТ переключает свои контакты: верхний размыкается, отключая катушку контактора КМ1, а нижний замыкается, включая контак-
тор «треугольника» КМ2.
Главные контакты КМ2 замыкаются, соединяя попарно выводы С1 и С6, С2 и С4, С3 и С8, тем самым образуя схему «треугольника»
Пуск закончен.
Вспомогательный контакт КМ1 включен в цепь катушки контактора КМ2. Также вспомогательный контакт КМ2 включен в цепь катушки контактора КМ1.
Это сделано для того, чтобы исключить одновременное включение обоих контак-
торов, при котором происходит короткое замыкание в цепи обмотки статора.
Схема автоматического пуска асинхронного электродвигателя в функции
времени через пусковые резисторы в цепи обмотки статора
Основные сведения
Пуск асинхронного двигателя через пусковые резисторы в цепи обмотки статора предназначен для уменьшения пусковых токов. При прямом пуске ( без резисторов ) пу-
сковой ток превышает номинальный в 4…7 раз, что вызывает большие провалы напряже-
ния судовой сети, а при частых пусках - перегревает обмотки статора и ротора.
Недостатком способа является уменьшение пускового момента вследствие умень-
шения напряжения на обмотке статора , поэтому его применяют в электроприводах, допу-
скающих при пуске уменьшение рабочих параметров ( у компрессора – давления, у насоса – подачи и т. п. )
Схема пуска
Схема автоматического пуска асинхронного электродвигателя в функции времени
через пусковые резисторы приведена на рис. 121.

Рис. 121. Схема автоматического пуска асинхронного электродвигателя в функции времени через пусковые резисторы
На рис. 121 приняты такие обозначения:
А, В, С – линейные провода;
КМ1.1…КМ1.3 – главные контакты линейного контактора КМ1;
R - пусковые резисторы ( 3 шт., по одному в каждом линейном проводе );
SB1, SB2 – кнопки соответственно «Пуск» и «Стоп»;
КМ1 – линейный контактор;
КМ2 – контактор ускорения;
КТ – электромагнитное реле времени ( с демпфером );
UZ – выпрямительный мостик ( мостик Греца ).