

12. Резисторы
Основные сведения
До сих пор многие из нас, увидев на электрических прямоугольник с буквой «R», называют его «сопротивление». На самом же деле этот прямоугольник – условное обо-
значение резистора.
Резистором называется электротехническое устройство, предназначенное для ока-
зания сопротивления протеканию электрического тока.
Единица измерения резисторов – штука.
Сопротивлением называется физическая величина, характеризующая степень про
тиводействия электрической цепи или ее участка ( например, резистора ) протеканию электрического тока.
Единица измерения сопротивления – Ом.
Теперь становится понятной фраза: электрическая схема состоит из двух последо-
вательно соединенных резисторов R1 и R2, имеющих сопротивления соответственно 15 и 40 Ом. Из фразы следует, что резисторов – 2 ( шт.), а их сопротивление измеряется в омах.
Реостатом называют аппарат ручного управления, предназначенный для плавного или ступенчатого изменения под током значений сопротивления резисторов.
Конструктивно в состав реостата, кроме самого резистора, входит переключающее устройство.
В зависимости от назначения, различают следующие виды реостатов:
пусковые – для пуска электрических двигателей постоянного и переменного тока;
регулировочные – для регулирования тока возбуждения двигателей постоянно-
го тока и генераторов постоянного и переменного тока ( их также называют «реостаты возбуждения» и «регуляторы возбуждения» );
пускорегулировочные – для пуска и регулирования частоты вращения двигате-
лей постоянного тока.
Более подробно реостаты рассмотрены ниже в § 1.3 «Типовые узлы и схемы управ-
ления электроприводами».
Классификация резисторов
Резисторы классифицируются по следующим основным признакам:
по назначению: пусковые; тормозные; добавочные; балластные; экономические,
разрядные; нагрузочные; нагревательные; установочные;
по электрическим характеристикам: низкого напряжения ( до 500 В ) и высоко-
го напряжения ( свыше 1000 В ); низкоомные ( до 10 Ом ) и высокоомные ( свыше 10 Ом), линейные и нелинейные;
по режимам работы: работающие в продолжительном режиме ( S1 ), кратковре-
менном ( S2 ), повторно-кратковременном ( S3 ) и других режимах;
4. по способу охлаждения: с естественным и искусственным охлаждением.
Схемы включения резисторов
Рассмотрим схемы включения резисторов, перечисленных выше.
Пусковые резисторы предназначены для уменьшения пусковых токов электродви-
гателей. Эти резисторы включают последовательно:
1. в цепь обмотки якоря электродвигателя постоянного тока ( рис.51, а );
в цепь обмотки статора асинхронного двигателя с короткозамкнутым ротором
( рис.51, б );
в цепь обмотки ротора асинхронного двигателя с фазным ротором.( рис. 51, в ).
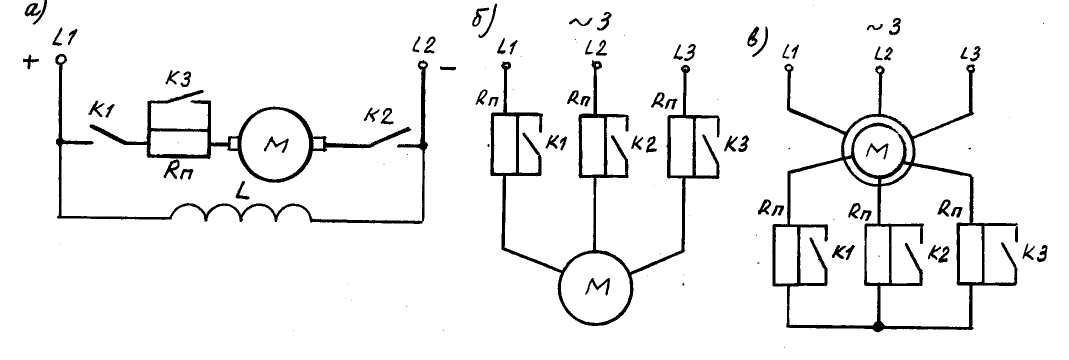
Рис. 64. Схемы включения пусковых резисторов: а - в цепь обмотки якоря двигателя постоянного тока; б – в цепь обмотки статора асинхронного двигателя
с короткозамкнутым ротором; в – в цепь обмотки ротора асинхронного двигателя
с фазным ротором.
При пуске двигателя постоянного тока ( рис. 64, а ) контакты К1 и К2 замкнуты, кон
такт К3 разомкнут, потому пусковой резистор Rп включен последовательно с обмоткой якоря и тем самым ограничивает пусковой ток до безопасных значений.
Аналогично, при пуске асинхронного двигателя с короткозакнутым ротором
( рис. 64, б ) контакты К1, К2 и К3 разомкнуты, потому пусковые резисторы Rп включены последовательно с обмоткой статора.
Подобно этому, разомкнуты контакты К1, К2 и К3 при пуске асинхронного двигате-
ля с фазным ротором ( рис. 64, в ), ограничивая пусковой ток ротора ( а значит, и ток ста-
тора ) до необходимых значений.
По окончании пуска в схеме на рис. 64, а замыкается контакт K3, а в схемах на рис. 64, б и 64, в - контакты К1, К2 и К3 , шунтируя пусковые резисторы.
Тормозные резисторы предназначены для уменьшения токов при электрическом торможении электродвигателей. Их включают последовательно в цепь обмотки якоря двигателей постоянного тока ( рис. 65, а ) или в цепь обмотки статора асинхронного двига
теля через понижающий трансформатор Т и выпрямитель UZ ( рис.65, б ).
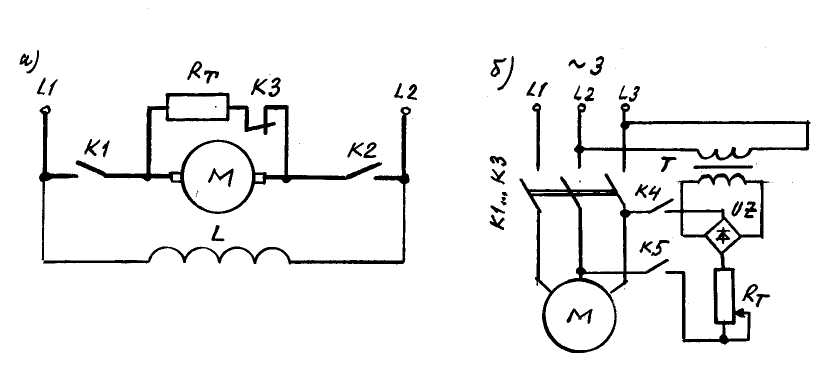
Рис. 65. Схемы включения тормозных резисторов: на постоянном токе ( а );
на переменном токе ( б )
Схема на рис. 65, а работает так. При пуске двигателя контакты К1 и К2 замкнуты, а контакт К3 разомкнут. При этом происходит прямой пуск двигателя при отключенном резисторе Rт .
Для электрического торможения размыкают контакты К1 и К2, тем самым обмотка якоря отключается от сети, и замыкают контакт К3. В результате обмотка якоря и резистор Rт оказываются соединенными последовательно, и под действием э.д.с. обмотки якоря ток в этой цепи меняет направление на противоположное – двигатель тормозится и останавли-
вается.
Схема на рис. 65, б работает аналогично. При пуске двигателя контакты К1, К2 и К3 замкнуты, а контакты К4 и К5 разомкнуты. При этом происходит прямой пуск асинхрон-
ного двигателя.
Для электрического торможения размыкают контакты К1, К2 и К3 , тем самым об-
мотка статора отключается от сети, и замыкают контакты К4 и К5. При этом через обмот-
ку статора протекает ток по цепи: “плюс” на верхнем выводе мостика UZ – контакт К4 – правая фазная обмотка статора ( внутри кружка ) – нулевая точка звезды – средняя фазная обмотка – контакт К5 – тормозной резистор Rт – «минус» на нижнем выводе мостика UZ.
В результате протекания постоянного тока через обмотку статора на вращающийся по инерции ротор начинает действовать тормозной электромагнитный момент. Двигатель тормозится и останавливается.
Пусковые и тормозные резисторы не предназначены для длительного протекания тока. Обычно процессы пуска и электрического торможения электродвигателей автомати-
зированы при помощи реле времени, выдержка которых – не более 1…2 с.
Добавочные резисторы применяют в цепях управления для получения пониженно-
го напряжения на участке электрической цепи. Для этого добавочный резистор R cоеди-
няют последовательно с приемником электроэнергии, например, электрической лампоч-
кой HL ( рис. 66, а ).
Разновидностью такой схемы является схема с делителем напряжения ( рис.64, б ). Делитель напряжения образован двумя резисторами R1и R2, включенными последова-
тельно. Приемник электроэнергии ( сигнальную лампочку НL ) включают параллельно одному из резисторов.

Рис. 66. Схемы включения добавочных резисторов: а – основная; б – с делителем напряжения на двух резисторах; в – то же, на трех резисторах.
При необходимости получения нескольких напряжений, каждое из которых мень
ше напряжения питающей сети, применяют делители напряжения с тремя резисторами R1, R2 и R3. При таком соединении напряжение U2 больше, чем U1.
Балластные резисторы применяют в силовых цепях для поглощения части элек
троэнергии путем преобразования её в тепловую в силовых цепях. Их включают последо
вательно с приёмником электроэнергии, который не рассчитан на прямое включение в сеть с данным напряжением. Для этого применяют схему на рис. 66, а ( вместо лампочки – мощный приемник электроэнергии ).
Например, судовая грелка, рассчитанная на напряжение 110 В, может быть включе
на в сеть напряжением 220 В через балластный резистор.
Экономические резисторы предназначены для уменьшения тепловых потерь в ка-
тушках электрических машин и электромагнитных аппаратов ( рис. 67, а и б ).
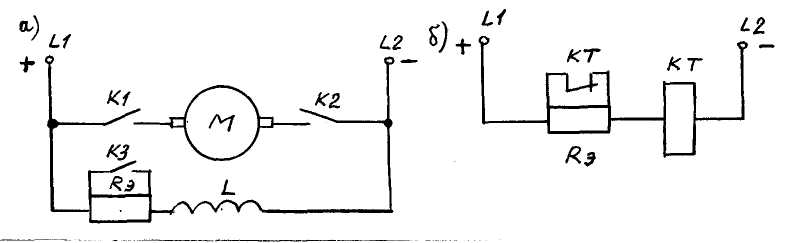
Рис. 67. Схема включения экономического резистора: в цепь обмотки возбуж-
дения двигателя постоянного тока ( а ); в цепь катушки контактора ( б )
В схеме на рис. 67, а, экономический резистор Rэ включается последовательно с па
раллельной обмоткой возбуждения L.
В исходном состоянии ( двигатель не работает, но питание на схему подано ) схемы контакты К1, К2 и К3 разомкнуты, и ток протекает через резистор Rэ и обмоту возбуждения L.
Сопротивление резистора Rэ рассчитывается так, чтобы оно уменьшало ток возбуж-
дения неработающего двигателя до 70…80% номинального.
При пуске и последующей работе контакты контакты К1, К2 и К3 замыкаются, об-
мотка якоря подключается к сети, а экономический резистор шунтируется. Ток в обмотке возбуждения увеличивается до номинального ( 100% ).
Тем самым этот резистор уменьшает тепловые потери в обмотке возбуждения и увеличивает ее срок службы.
В схеме на рис. 67, б экономический резистор Rэ включён последовательно с катуш
кой КТ тормозного контактора . В исходном состоянии контакт КТ замкнут и шунтирует резистор Rэ.
При подаче питания на зажимы L1, L2 сразу же ток катушки КТ максимальный, т.к. он протекает через контакт КТ и далее через катушку КТ.
После включения контактора его контакт КТ размыкается, вводя последовательно в цепь катушки КТ резистор Rэ . Поэтому ток в катушке КТ уменьшается до 70…80% макси
мального. Однако такого тока достаточно для того, чтобы якорь контактора КТ удерживал
ся притянутым, т.е. контактор КТ оставался включенным.
Таким образом, при работе контактора КТ ток в его катушке понижен, что уменьша
ет нагрев катушки и, дополнительно, позволяет применить для катушки провод меньшего сечения ( за счет уменьшения тока ). Это дает экономию меди и средств ( отсюда название резистора – «экономический» ).
Разрядные резисторы предназначены для защиты обмоток электрических машин и катушек электромагнитных аппаратов от пробоя изоляции при их отключении. Эти рези-
сторы включают параллельно катушкам ( рис. 68, а и 68, б ).
В схеме на рис. 68, а, при работе двигателя контакты К1 и К2 замкнуты, и ток проте
кает через три параллельные ветви: обмотку якоря М, параллельную обмотку возбужде-
ния ОВ и разрядный резистор Rр.
Действие разрядного резистора проявляется при размыкании контактов К1 и К2 .
Если бы разрядного резистора не было, то при размыкании контактов ток парал-
лельной обмотки возбуждения уменьшился бы от номинального значения I в.н до 0 за ма-
лый промежуток времени dt1 ( рис.68, в, кривая 1 ).
При этом в обмотке возбуждения индуктируется ЭДС самоиндукции
Е![]() = - L ( d Iв/
dt1),
= - L ( d Iв/
dt1),
значение которой за счет малого времени dt1 ( в знаменателе ) в 10…20 раз больше номинального напряжения обмотки, что может вызвать пробой изоляции.
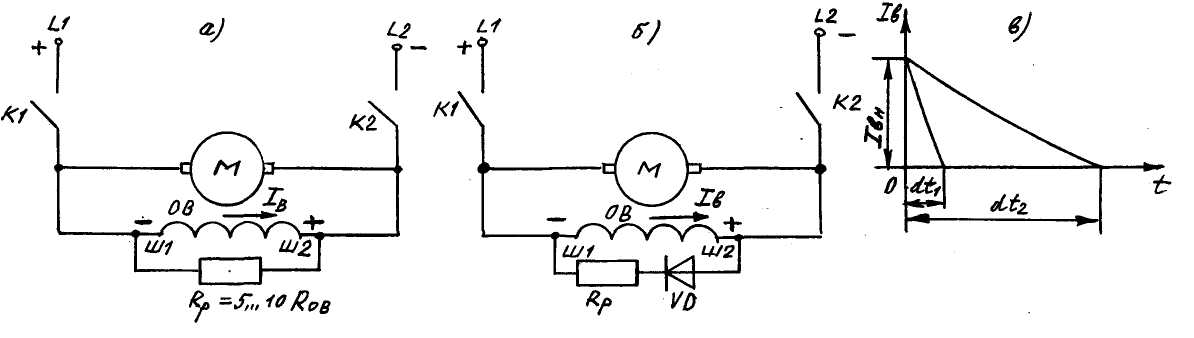
Рис. 68. Схема включения разрядного резистора ( а ); то же – с диодом ( б );
кривые изменения тока в обмотке возбуждения без разрядного резистора ( левая ) и с ним ( правая ) – ( в ).
При наличии разрядного резистора и размыкании контактов К1 и К2 также индукти
руется ЭДС самоиндукции Е , но её значение значительно меньше, чем в первом случае. Такое уменьшение объясняется тем, что параллельно включенные обмотка возбуждения и разрядный резистор образуют последовательную цепь – так называемый «разрядный контур».
В этом контуре э.д.с. самоиндукции, в соответствии с правилом Ленца, имеет поляр
ность, обозначенную символами « + » и « - ». Эта э.д.с. поддерживает в обмотке возбужде-
ния убывающий ток, который протекает по цепи:
«плюс» э.д.с самоиндукции на выводе Ш2 – разрядный резистор Rр – «минус» э.д.с самоиндукции на выводе Ш1 – обмотка возбуждения ОВ.
При этом время убывания тока в обмотке возбуждения увеличивается за счет дейст
вия э.д.с. самоиндукции до значения dt2, поэтому э.д.с. самоиндукции резко уменьшается..
Защита от пробоя изоляции действует, если выполняется соотношение:
Rр = ( 5…10 ) Rов.
Недостаток схемы – протекание тока через резистор Rр при работе схемы.
Его иногда устраняют, включая последовательно с разрядным резистором полупро-
водниковый диод VD.
В этом случае ток через резистор Rр не протекает при работе двигателя, но начина-
ет протекать при отключении двигателя от сети, на отрезке времени dt2.
Нагрузочные резисторы предназначены для создания нагрузки электрических генераторов при их испытаниях на берегу после профилактики или ремонта.
Эти резисторы позволяют изменять нагрузку генераторов ( в сотни и тысячи кВт ) достаточно плавно в пределах от 0 до номинальной.
Нагревательные резисторы ( грелки ) предназначены для обогрева служебных электрических помещений с целью устранения конденсации влаги, которая понижает сопротивление изоляции обмоток электрических машин и аппаратов. Их устанавливают в румпельных отделениях, аккумуляторных, моторных отделениях и кабинах кранов и т.п.
Установочные резисторы предназначены для получения ( установки ) необходи-
мого значения тока или падения напряжения в каком-либо участке электрической цепи. Они включаются последовательно в электрическую цепь, например, цепь параллельной обмотки возбуждения двигателя постоянного тока ( рис. 67 ).
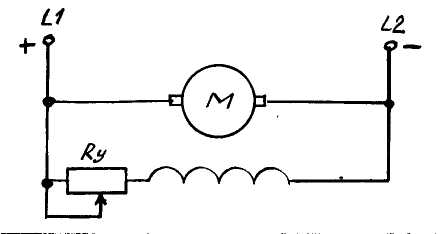
Рис. 69. Схема включения установочного резистора
Отличительным признаком таких резисторов является металлический хомут, кото-
рый при настройке вручную перемещают вдоль резистора до получения необходимого зна
чения тока ( напряжения ), после чего хомут закрепляют неподвижно при помощи винта и в дальнейшем ( при работе ) не перемещают.