

1. Серводвигатели
Серводвигатели – это электрические двигатели мощностью 10…15 Вт, предназна-
ченные для перемещения рабочих органов насосов переменной подачи.
Такими органами является:
у радиально-плунжерных насосов ( Холла ) – барабан;
у аксиально-плунжерных насосов – поворотная люлька.
Если при помощи серводвигателя вывести барабан насоса из нулевого положения
( повернуть люльку ), перо руля начинается поворачиваться, если же вернуть барабан ( люльку ) в исходное ( нулевое ) положение, перо руля остановится.
В качестве серводвигателей используются 3- и 2-фазные асинхронные двигатели.
На судах отечественного производства используются 2-фазные асинхронные двига
тели серии АДП ( А – асинхронный, Д – двигатель, П – полый ротор ) ( рис .271 ).
 .
.
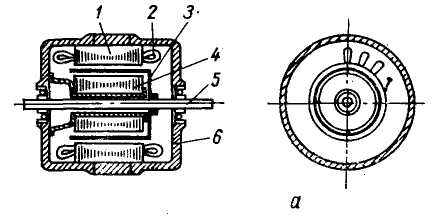
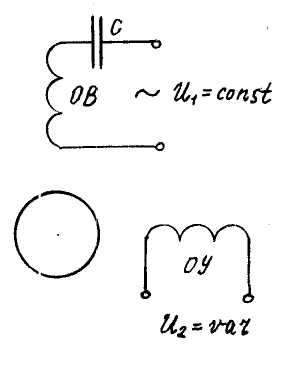
Рис. 271. Асинхронный двигатель серии: а – устройство; б – схема включения;
1 – внешний статор; 2 – обмотка возбуждения ( управления ); 3 – полый ротор;
4 – внутренний статор; 5 – вал; 6 – подшипниковый щиток
Двигатель имеет два статора – внешний 1 и внутренний 4. Последний закреплен на одном из подшипниковых щитков и служит для уменьшения магнитного сопротивления на пути основного магнитного потока.
На внешнем статоре двигателя уложены две обмотки: обмотка возбуждения ОВ и обмотка управления ОУ. Оси этих обмотки расположены под углом 90°, поэтому их маг-
нитные потоки сдвинуты в пространстве на такой же угол.
На обмотку возбуждения подается стабильное напряжение U величиной 36, 40 или 110 В ( в зависимости от типа двигателя ).
На обмотку управления ОУ с выхода усилителя системы управления РЭП ( магнит-
ного или электронного ) подается напряжение управления U , которое может изменяться как по величине, так и по фазе.
В щель между внешним и внутренним статорами вставлен полый ротор 3, который
сидит на валу 5. Вал свободно вращается на подшипниках, установленных в щитках 6.
Ротор выполнен в виде тонкостенного латунного стакана, что позволило свести к минимуму его инерционность – ротор быстро разгоняется и быстро останавливается.
В цепь обмотки возбуждения включен конденсатор С, поэтому ток в этой обмотке
сдвинут на 90° ( в сторону опережения ) по отношению к току в обмотке управления.
Такой двойной сдвиг – обмоток на статоре на 90° ( в пространстве ) и токов в них
на 90° ( электрических – на векторной диаграмме ) позволил получить при помощи этих обмоток вращающееся магнитное поле.
Это поле при вращении пересекает стенки полого ротора и индуктирует в них ЭДС В роторе возникает ток, который, взаимодействуя с вращающимся магнитным полем, вызывает образование электромагнитного момента – ротор начинает вращаться.
Скорость ротора тем больше, чем больше напряжение U на обмотке управления.
Если фазу этого напряжения изменить на обратную ( на 180°), ротор реверсирует.
2. Электромагнитные муфты
Электромагнитные муфты – это электромагнитные аппараты, предназначенные для разрыва или переключения механической связи между двумя валами – ведущим ( со сторо
ны серводвигателя ) и ведомым ( со стороны манипулятора насоса ).
Муфты выпускаются двух типов: МЭС (соединяющие) и МЭП (переключающие).
Электромагнитная муфта типа МЭС (рис. 272 ) состоит из корпуса 1 с закреплен-
ной внутри катушкой 2, валика 8 ( вдоль него по специальным пазам перемещается якорь 4 с фрикционным диском 6 ). На валик 8 насажен шарикоподшипник 7, на внешней обой-
ме которого закреплено зубчатое колесо 5.
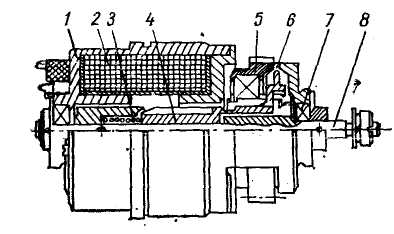
Рис. 272. Устройство электромагнитной муфты типа МЭС:
1 – корпус; 2 – катушка; 3 – пружина; 4 – якорь ( подвижная часть ) муфты;
5 – зубчатое колесо; 6 – фрикционный диск; 7 – шарикоподшипник; 8 - валик
Принцип действия муфты состоит в следующем.
При подаче питания на катушку 2 муфта срабатывает, то есть якорь 4, преодолевая сопротивление пружины 3, втягивается в катушку, а фрикционный диск 6 прижимается к торцу зубчатого колеса 5. Следовательно, вращение от валика 8 будет передаваться на зубчатое колесо 5.
Если питание снять, якорь 4 под действием пружины 3 переместится в первона-
чальное состояние, а фрикционный диск 6 освободит зубчатое колесо.
У реверсивной (переключающей) муфты МЭП при срабатывании электромагнита фрикционный диск освобождает одно зубчатое колесо и прижимается к другому.