

4. Дослідження динамічних та статичних характеристик при живленні від пч
Частотне керування АД, автором якого є Костенко М. П. , є найпростішим способом керування асинхронним двигуном з короткозамкненим ротором, який розглядався як основний до появи векторних методів. Частотне керування, хоч і не дозволяє регулювати координати електропривода з заданими динамічними та статичними характеристиками, а процеси регулювання кутової швидкості і моменту містять некеровані складові, має декілька принципових переваг: простота реалізації та запуску в роботу, відсутність у необхідності вимірювання кутової швидкості та струмів статора, можливість використання тих параметрів АД, що легко визначаються або користуватися для налаштування лише номінальними даними. В класичному формулюванні частотне керування ґрунтується на залежностях, які отримуються з розгляду усталених режимів роботи АД.
4.1 Дослідження статичних характеристик при живленні від пч Постановка задачі керування
Розглянемо модель АД, представлену в координатах потокозчеплень статора і струмів ротора

де
 - компоненти векторів потокозчеплення
статора, струму ротора і напруги статора,
ω
– кутова швидкість, ω0
і
θ0
–
кутова швидкість та кутове положення
системи координат (d-q)
відносно стаціціонарної системи
координат (a-b),
ω2
=ω0
- ω
- частота ковзання.
- компоненти векторів потокозчеплення
статора, струму ротора і напруги статора,
ω
– кутова швидкість, ω0
і
θ0
–
кутова швидкість та кутове положення
системи координат (d-q)
відносно стаціціонарної системи
координат (a-b),
ω2
=ω0
- ω
- частота ковзання.
Постійні параметри визначені наступним чином:

Перетворені змінні визначаються у відповідності до

В загальній постановці задачі керування кутовою швидкістю та модулем потокозчеплення статора вихідні регульовані змінні задаються

а
також припускається, що вектор змінних
стану не вимірюваний, тобто розглядається
повністю розімкнене керування, при
якому вихідні змінні мають регулюватися
за допомогою двомірного вектора керуючих
напруг статора
 .
.
Припустимо, що ω* = const , ψ* = const визначають задані значення кутової швидкості і модуля потокозчеплення статора, тоді задача регулювання вихідних змінних полягає у досягненні умови

де похибки регулювання дорівнюють

Використовуючи концепцію орієнтації по вектору потокозчеплення статора, переформулюємо другу умову наступним чином:

де похибки регулювання потокозчеплення по осям d і q визначені як

Відмітимо, що перша умова визначає досягнення полеорієнтування за вектором потокозчеплення статора.
Досягнення
еквівалентних умов можливе лише для
випадку не
навантаженого
двигуна, тобто при
MC
= 0 . В цьому випадку струми ротора в
усталеному
режимі дорівнюють нулю. Визначивши
 мета
частотного керування може бути
формалізована таким чином: знайти
керуючі напруги u1d
і
u1q
,
які гарантують досягнення умови
мета
частотного керування може бути
формалізована таким чином: знайти
керуючі напруги u1d
і
u1q
,
які гарантують досягнення умови

Конструювання алгоритму частотного керування
В похибках відпрацювання рівняння запишуться (при ω* = const, ψ*=const).
 де
де

З рівнянь для потокозчеплень знаходимо
u1d =αψ*
u1q =ω0ψ*
Фізичні напруги, які прикладаються до обмоток АД дорівнюють

Відмітимо, , що для практичної реалізації необхідно знати параметр α1 = R1 / L1, який легко визначається на основі стандартних тестів. Потреби у вимірюванні струмів статора та кутової швидкості для реалізації алгоритму немає.
Для встановлення зв’язку алгоритму частотного керування з описаними в технічній літературі запишемо вирази для модуля напруги статора

Залежність U1m = f (ω*,ψ* ) представлена на Рисунку 4.1 суцільною лінією.
Якщо сформувати ψ* = ψ0* + ψ1(ω*), то можливе отримання різних регулювальних характеристик U /f .Структурна схема алгоритму частотного керування показана на Рисунку 4.2.
Рисунок 4.1– Статичні характеристики при частотному керуванні
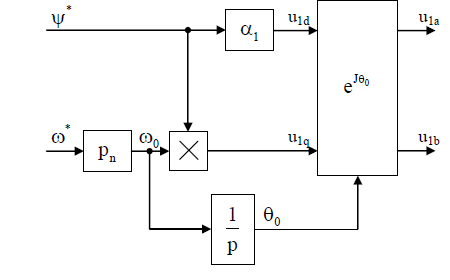
Рисунок 4.2 – Структурна схема алгоритму частотного керування
Будуємо
механічні характеристики при частотному
керуванні для заданих швидкостей:
 .
.
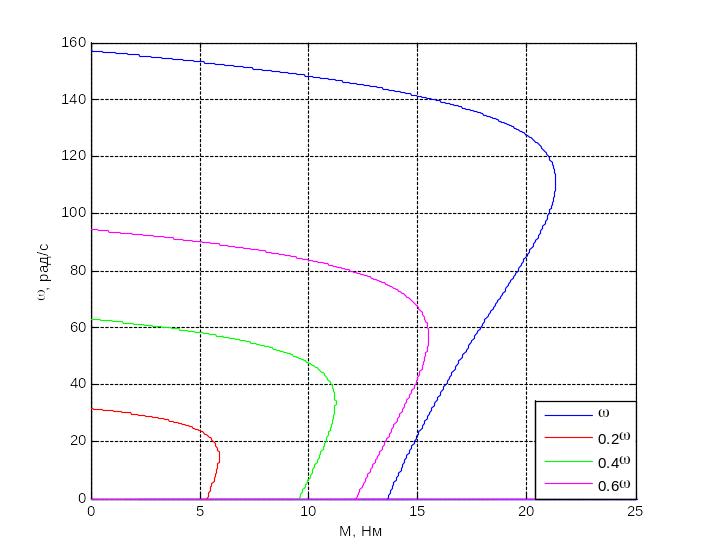
З аналізу графіків, зображених на Рисунках 4.1-4.3, механічних характеристик видно, що значення критичного моменту двигуна в рушійному режимі зменшується, коли задана швидкість є більшою або меншою відномінального значення.
Рисунок
4.1.1
– Механічні характеристики двигуна
АД 4А80В4У3
в рушійному режимі при частотному
керуванні U/f=const,

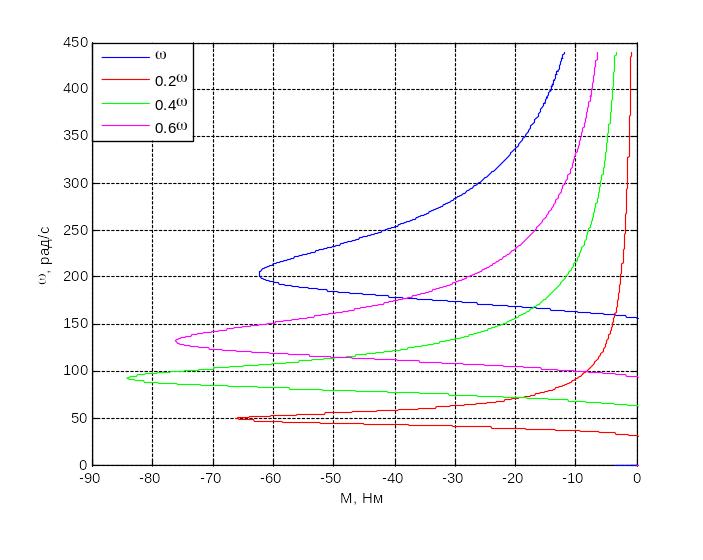
Рисунок 4.1.2 – Механічні характеристики двигуна АД 4А80В4У3 в генераторному режимі режимі при частотному керуванні U/f=const,
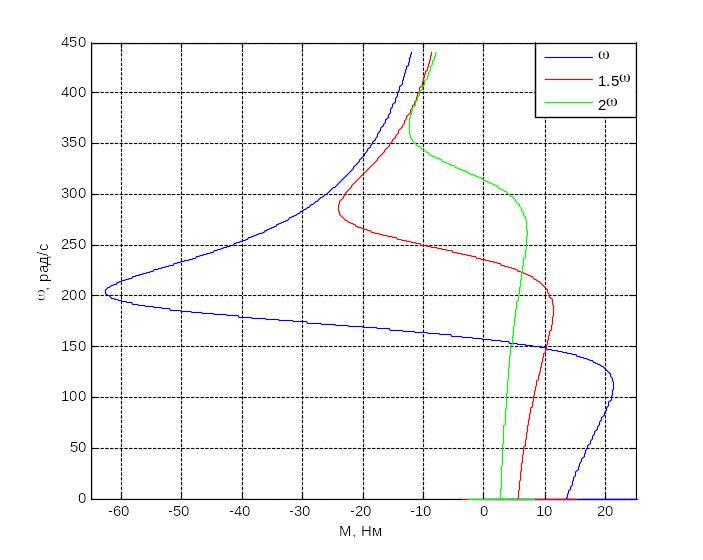
Рисунок
4.1.3
– Механічні характеристики двигуна
АД 4А80В4У3
при частотному керуванні U/f=const,
