

3.1.2 Критерій вибору датчика для визначення лінійного зміщення.
Як датчик для визначення лінійного зміщення був обраний абсолютний кутовий енкодер AS5040.
Переваги:
- Найкраще співвідношення ціна / точність;
- Відсутня механічний знос;
- 360 ° абсолютний кругової магнітний енкодер;
- 10, 9, 8, 7-біт програмоване дозвіл.
Цей датчик знаходиться у вільному продажу і не є дефіцитним. Також є докладна документація з прикладами його використання.
Принцип роботи з енкодера.
Кутовий енкодер складається з ІС енкодера, що вимірює зміна магнітного поля, розподіленого на торцевій поверхні стандартного діаметрально намагніченого циліндричного магніту
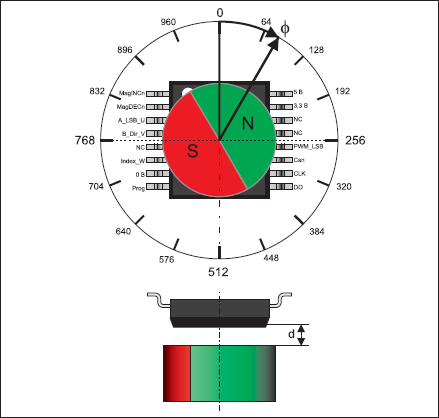
Рисунок 10 - Робочий принцип двохосьового абсолютного кутового енкодера на прикладі AS5040 (SSOP16).
У інтегральних датчиках технологія ефекту Холла реалізована у вигляді кругового сенсорного масиву чутливих елементів, зосереджених навколо кремнієвої підкладки в центрі ІС. Хрестоподібний сенсорний масив, що складається з попарно ортогонально орієнтованих елементів Холла, формує двовимірне розподіл електричної напруги, відповідного синусоидальному просторовому розподілу робочого магнітного поля B, яке математично моделюється виразом:

де Bmax - амплітудне значення магнітного поля, Boff - ненульовий зсув поля, φ - фазовий зсув магнітного поля від нульової осі при обертанні магніту щодо нерухомого енкодера (вимірюваний кут), x = ωt + φ0 - приведена незалежна змінна, ω - кутова швидкість, t - власне незалежна змінна (час), φ0 - кутова координата нульової площини в полярній системі відліку.
При інтегруванні магнітного поля по x в чотирьох елементах ортогонально орієнтованих пар і підсумовуванні отриманих інтегралів будуть отримані синусна і косінусна інформація (виходи напруги) про кутове положення магніту. Абсолютне кутове положення розраховується з використанням функції арктангенс:
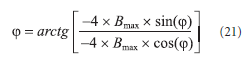
У сімействі AS50хх інтегрована обробка сигналів з функцією арктангенс, реалізованої з 6-бітним диференціальним АЦП (AS5020 і AS50223) або 10-бітовим АЦП (AS5040 / 3), утворює еквівалентний по розрядності двійковий код, доступний через стандартний синхронний послідовний SSI-інтерфейс, і дозволяє зчитувати відповідно 64 або 1024 кутових становища за період 360 ° (див. ріс.36). Цифровий код включає попереджуючі біти стану джерела магнітного поля й біти парності.

Рисунок 11 – Схема 10-бітного програмованого кутового енкодера AS5040:
а - функціональна схема; б - SSI - інтерфейс з даними про абсолютне кутовому положенні, в - інкрементальні вихідні режими AS5040; г - гістерезис інкрементальних висновків; д - ШІМ - інтерфейс з даними про абсолютне положенні
Етап початкового інтегрування скидає компоненти помилок зсуву, наведені магнітним джерелом або перешкодами. Спеціальний алгоритм з пропорційною арктангенсной функцією дозволяє мінімізувати варіації магнітного поля, викликані помилками вирівнювання магніту і впливом робочих умов.
Стосовно до AS50xx поліпшена техніка компенсації елементів Холла спільно зі схемою компенсації інструментального підсилювача мінімізує типові помилки технологічного процесу, корпусування, впливу температури і помилок посилення і допускає освіту напруги зміщення всього кілька мілівольт. Індивідуальний контроль напруги зсуву елементів Холла і зміщуються струмів дозволяє забезпечувати кращий контроль дрейфу посилення та неузгодженостей окремих сигналів.
Обробка сигналу в AS5040 (рис. 36) здійснюється через сигма-дельта аналогоцифрового перетворення і CORDIC-алгоритм ЦГЗ, що розраховує величину і зміщення сигналів елементів Холла, що забезпечує одержання високоточної інформації про абсолютне кутовому положенні.
Магнітні кутові енкодери типу AS5040 стійкі до зсувів магніту і зовнішнім магнітним збурень згідно диференціальної техніці вимірів, варіацій повітряного зазору і температурних варіацій згідно синусно - косинусне оцінці сигналу.
Цифрове слово SSI-інтерфейсу AS5040 з 10-бітним кодом даних включає біти статусу компенсації зрушень, помилки даних (переповнення CORDIC-алгоритму), застережливий біт лінійності, цифрову інформацію MagINCn іMagDECn про переміщення магніту у вертикальній осі (доступну також на виходах MagINCn і MagDECn) , і біт парності (рис. 36). Абсолютна становище оцінюється зі швидкістю 10 кГц (0,1 мс), що відповідає зчитування 1024 положень магніту за період 360 ° протягом 0,1 с (9,76 Гц або 585,9 об / хв максимум). Без пропусків можливо отримання швидкостей до 1200 об / хв.
На додаток, 10-бітове абсолютне значення кута у вигляді одноканального ШІМ-сигналу з робочим циклом, пропорційним куті, є на виведення 12 PWM_LSB. З використанням зовнішнього ФНЧ ШІМ-сигнал може бути перетворений в пропорційне аналогове напруга, що дозволяє використовувати AS5040 для заміщення потенціометрів.
3.2 Реалізація програмної частини мікроконтролера.
Сформуємо основні вимоги, які повинна виконати програма, що працює на мікроконтролері ATmega8:
1) Набір команд:
- початок вимірювання;
- запит даних;
- Завершення вимірювань.
2) Перед початком вимірювань для кожного датчика повинна бути визначена початкова точка відліку.
3) Опитування всіх датчиків.
4) На основі отриманих даних від датчиків визначити напрямок повороту.
5) Для кожного датчика розрахувати зміщення відносно початкової точки.
6) формувати посилки даних відправляються на ПК.
Сформуємо основні вимоги, які повинна виконати програма верхнього рівня:
1) Виведення інформації у вигляді графіків;
2) Вибір номера COM-порту;
3) Вибір файлу в який будуть збережуться результати роботи;
4) Можливість відправляти керуючі команди пристрою.
5) Вибір частоти опитування датчиків.
3.2.1 Логічна структура програми для МК ATmega8.
Програма реалізована з використанням операційної системи scmRTOS. Причиною використання ОС послужило, те що програма повинна виконувати три задачі:
1) очікування команд;
2) опитування датчиків та обробка результатів;
3) формування посилки відповіді.
Завдання 2 і 3 реалізовані засобами ОС scmRTOS. Задача 1 реалізована на основі переривання від UART.

Рисунок 12 - Структура программы прошивки
Процес № 1 очікує вхідні дані. Реалізований на основі переривання від UART.
Якщо мікроконтроллер отримає дані, то вони будуть записані в канал. Канал - це сервіс OC scmRTOS який дозволяє безпечно передати дані будь-якого процесу в системі. Після чого переривання завершиться і управління буде передано ОС, яка тут же передасть управління процесу який очікує дані.

Рисунок 13 – Блок схема процеса 1
Процес №2 здійснює дві функції:
- якщо цей початок виміру, то проводить ініціалізацію початкових даних;
- якщо це робочий режим, то проводить опитування датчиків і коригує дані.
Процес реалізований засобами ОС і є її частиною.
Якщо процес був запущений з командою початок вимірів, то будуть виконані наступні дії:
1) Вхід в критичну секцію. Код який знаходиться в критичній секції не може бути перерваний чим або.
2) Визначається поточний стан энкодеров. Це стани надалі сприйматиметься як нуль.
3) Ініціалізувалися змінні необхідні для визначення напрями повороту энкодеров і довжина кроку на який змістилася стрілка.
4) Процес переводиться в робочий режим.
5) Вихід з критичної секції.
6) Кінець
Якщо процес знаходиться в робочому режимі, то будуть виконані наступні дії:
1) Вхід в критичну секцію.
2) Опитування стану энкодеров.
3) Вихід з критичної секції.
4) Захоплення мьютекса. Ця дія потрібна для синхронізації процесів 2 і 3.
5) Коригування даних. Буде визначено напрям повороту энкодеров і довжина кроку.
6) Звільнення мьютекса.
7 )
Кінець.
)
Кінець.
Рисунок 14 – Блок схема процеса 2
Процес №3 чекає подію від ОС "повернути дані". Процес реалізований засобами ОС і є її частиною.
Після настання події процес виконає наступні дії:
1) Захоплення мьютекса. Ця дія потрібна для синхронізації процесів 2 і 3.
2) Відправка даних на ПК.
3) Звільнення мьютекса.
4) Кінець.

Рисунок 15 – Блок схема процесса 3.
3.3 Критерій вибору мікросхеми узгодження рівнів RS232 <=> UART.
В якості мікросхеми узгодження була обрана мікросхема MAX232. Це було зумовлено її великою популярністю і доступністю.
MAX232 - інтегральна схема, яка перетворює сигнали послідовного порту RS-232 у сигнали, придатні для використання в цифрових схемах на базі ТТЛ або КМОП технологій. MAX232 працює приемопередатчиком і перетворює сигнали RX, TX, CTS і RTS.
Функціональність і цоколевка мікросхеми стала стандартом де-факто і її аналоги (з іншого маркуванням) випускаються безліччю виробників напівпровідників.
Схема забезпечує рівень вихідної напруги, що використовується в RS-232 (приблизно ± 7.5 В), перетворюючи вхідну напругу + 5 В за допомогою внутрішнього зарядового насоса на зовнішніх конденсаторах. Це спрощує реалізацію RS-232 в пристроях, що працюють на напругах від 0 до + 5 В, так як не потрібно ускладнювати джерело живлення тільки для того, щоб використовувати RS-232.
Вхідна напруга від RS-232, яке може досягати ± 25 В, знижується до стандартних 5 В, використовуваних в транзисторних-транзисторної логіки. Входи мають середній поріг 1.3 В і середній гістерезис 0.5 В.
4 РОЗРОБКА ПРОГРАМНОГО ЗАБЕЗПЕЧЕННЯ ІНФОРМАЦІЙНО-КЕРУЮЧОЇ ОБОЛОНКИ СИСТЕМИ
Програма верхнього рівня реалізована на мові С Sharp.
Користувач може:
• Вибрати номер COM-порту до якого підключено пристрій;
• Вибрати частоту опитування датчиків;
• Вибрати файл для збереження результату роботи. У цей файл динамічно буде збережуться результати;
• У будь-який момент часу зберегти результати опитування будь-якого з датчиків. Для цього необхідно натиснути праву кнопку миші на необхідному графіку і вибрати пункт «Зберегти у ...»;
У разі виникнення помилки робота буде зупинена. Під час роботи може виникнути два види помилок:
1. Пристрій перестало відгукуватися.
2. Файл для запису результатів роботи став недоступний.
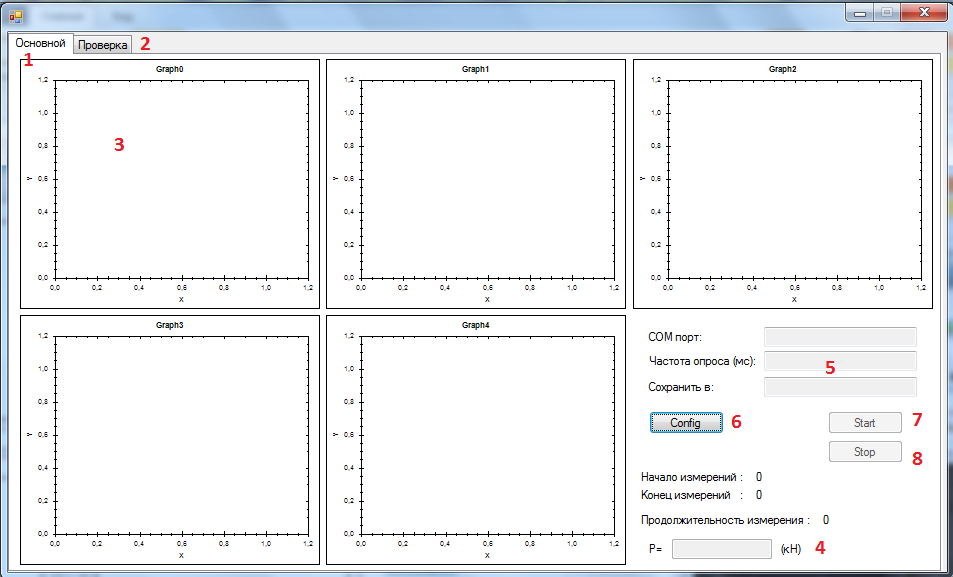
Рисунок 16 – Головне вікно програми:
1-закладка вибору основного режиму; 2 - закладка вибору режиму підстроювання; 3-графік, відображає поточні результати; 4 - поточне значення сили; 5 - поточні налаштування проекту; 6 - виклик діалогу налаштування; 7 - запуск роботи; 8 - Зупинити вимірювання.
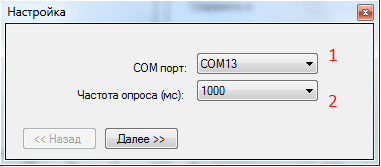
Рисунок 17 - Вікно налаштування підключення.
1-вибір COM-порту; 2-вибір частоти опитування датчиків.
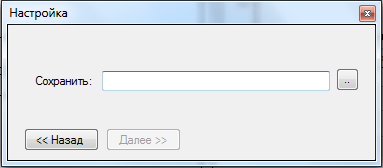
Рисунок 18 – Вікно настройки проекту.
Вкладка «Перевірка»необхідна для налагодження та калібрування пристрою.
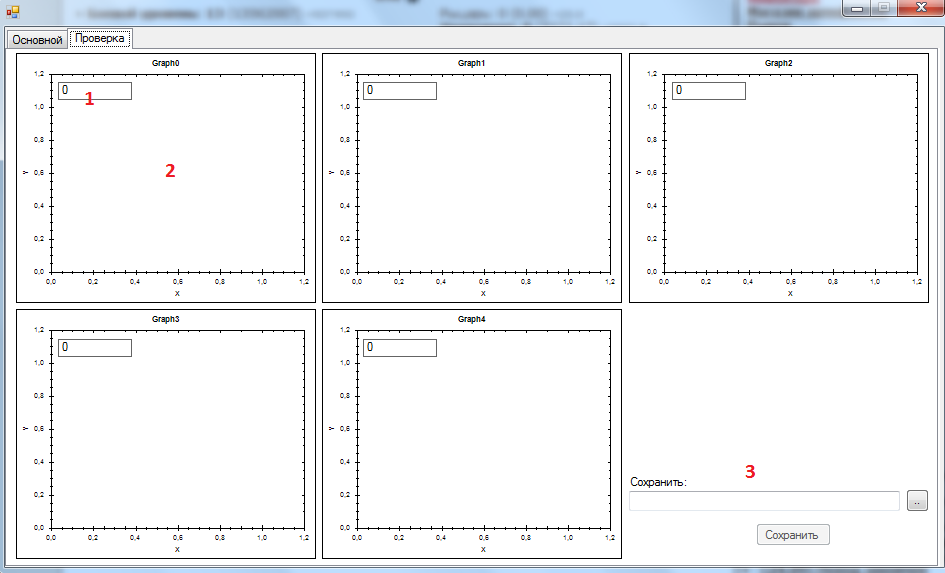
Рисунок 19 - Вікно для калібрування пристрою.
1 - поточне значення, МКК, 2-графік, відображає динаміку зміни значень датчика; 3 - вибір файлу для збереження результату.
5 ТЕХНІКО-ЕКОНОМІЧНЕ обгрунтування
У дипломній роботі розроблено програмне забезпечення приладу, що дозволяє виміряти лінійне зміщення у динамічному діапазоні 0 .. 10 мм з точністю 10 мкм. У даному розділі необхідно виконати розрахунок собівартості вище зазначеного програмного продукту та проаналізувати його орієнтовну ціну, рентабельність, порівняти отримані результати з ідентичними показниками аналогічних програмних продуктів.
Згідно з методикою, представленої в [23] собівартість розробки програмного продукту визначається сумарними витратами на його розробку.
Калькуляція собівартості розробленого програмного продукту (програмного забезпечення) складається за такими статтями витрат:
![]() (5.1)
(5.1)
де
![]() – вартість витратних матеріалів,
необхідних для розробки програмного
продукту, грн.;
– вартість витратних матеріалів,
необхідних для розробки програмного
продукту, грн.;
![]() – витрати
на сумарну заробітну плату розробників
програмного продукту, грн.;
– витрати
на сумарну заробітну плату розробників
програмного продукту, грн.;
![]() – відрахування
із заробітної плати розробників
програмного продукту до фондів
загальнообов'язкового державного
соціального страхування (відрахування
на соціальні заходи), грн.;
– відрахування
із заробітної плати розробників
програмного продукту до фондів
загальнообов'язкового державного
соціального страхування (відрахування
на соціальні заходи), грн.;
![]() – витрати
на утримання та експлуатацію обладнання
(або витрати на оплату машинного часу)
у складі витрат на розробку програмного
продукту, грн.;
– витрати
на утримання та експлуатацію обладнання
(або витрати на оплату машинного часу)
у складі витрат на розробку програмного
продукту, грн.;
![]() – інші
накладні витрати у складі витрат на
розробку програмного продукту, грн.
– інші
накладні витрати у складі витрат на
розробку програмного продукту, грн.