

3.5 Магнитный модулятор
Магнитные модуляторы, предназначенные для работы на последующий электронный или полупроводниковый каскад усиления, называют магнитными усилителями напряжения. Различают магнитные модуляторы с выходным переменным током основной и удвоенной частоты.
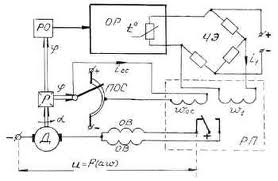
Магнитный модулятор состоит из магнитного усилителя с внутренней обратной связью, питаемого от источника прямоугольных импульсов, на выход которого подключается регулирующий транзистор стабилизатора напряжения.
Магнитные модуляторы работают в режиме полного разряда накопителя. Питается модулятор обычно от источника переменного тока. Поэтому недостатки, присущие модуляторам с зарядом накопителя от источника переменного тока , относятся и к данному модулятору. Однако магнитные модуляторы имеют и достоинства, делающие их в ряде случаев незаменимыми.
Магнитные модуляторы с импульсным выходом представляют собой усилители, имеющие выходное напряжение, в виде импульсов, продолжительность которых по сравнению с промежутками времени между ними невелика. При этом амплитуда импульса определяется величиной сигнала на входе, а его фаза - знаком.
Магнитный модулятор позволяет получить существенное усиление; устойчивость нуля имеет порядок 10 - 16 вт; эта устойчивость ограничена только шумами, обусловленными магнитными сердечниками и степенью подавления фильтром нечетных гармоник. Магнитный модулятор имеет практически неограниченный срок службы; он представляет собой очень жесткую конструкцию, выдерживающую довольно значительные механические и электрические перегрузки; такой модулятор позволяет использовать несущую с достаточно большой частотой. С другой стороны, магнитный модулятор - относительно дорогое устройство и, кроме того, выходной сигнал этого устройства не содержит составляющей с основной частотой.
3.6 Исполнительный механизм
Устройство предназначено для обеспечения управления силовыми электроприборами от слаботочных выходов различных датчиков. Оно обеспечивает гальваническую развязку между датчиками и электроприборами. Устройство состоит из электронного ключа, выполненного на транзисторе и электромеханическом реле, которое способно коммутировать ток до 3 А.
Электрический исполнительный механизм как объект управления
Регулирующая арматура, куда входят исполнительный механизм и собственно регулирующий клапан, представлена на рис. 1.
Выше уже отмечалось, что электрический исполнительный механизм в силу своих конструктивных особенностей и принципа действия представляет собой разновидность интегратора, который изменяет положение выходного вала или штока при подаче импульса управления (когда электродвигатель вращается) и сохраняет это положение при отсутствии управляющего воздействия.
Это свойство электрического исполнительного механизма существенным образом выделяет и характеризует его как объект управления.
 Кроме того, при
рассмотрении схем автоматизации с
применением электроприводов необходимо
также учитывать, что электропривод,
являясь физическим устройством,
потребляет значительную электрическую
мощность, которая составляет от нескольких
десятков Ватт до нескольких тысяч Ватт.
Кроме того, при
рассмотрении схем автоматизации с
применением электроприводов необходимо
также учитывать, что электропривод,
являясь физическим устройством,
потребляет значительную электрическую
мощность, которая составляет от нескольких
десятков Ватт до нескольких тысяч Ватт.
Принимая во внимание то обстоятельство, что выходные сигналы контроллера-регулятора, как правило, имеют очень низкую выходную мощность, то для управления исполнительным механизмом, взаимодействующим с реальным физическим процессом,выходной сигнал регулятора необходимо усиливать. Применение для этих целей устройств, выпускаемых НПФ КонтрАвт, приведено далее в статье.
В составе регулирующей арматуры электроприводы имеют и целый ряд специфических характеристик, которые следует учитывать или, как минимум, иметь о них отчетливое представление. Рассмотрим их более подробно.
Классификация электрических исполнительных механизмов
|
|
 лектрическим
исполнительным механизмом в системах
управления
обычно называют устройство,
предназначенное для перемещения
рабочего органа в соответствии с
сигналами, поступающими от управляющего
устройства.
лектрическим
исполнительным механизмом в системах
управления
обычно называют устройство,
предназначенное для перемещения
рабочего органа в соответствии с
сигналами, поступающими от управляющего
устройства.
 омощью
рабочего органа осуществляет
непосредственное воздействие на
управляемый объект.
омощью
рабочего органа осуществляет
непосредственное воздействие на
управляемый объект.

 сполнительные
механизмы с управляемыми двигателями
в свою очередь можно разделить по
способу построения системы управления
на механизмы с контактным и
бесконтактным управлением.
сполнительные
механизмы с управляемыми двигателями
в свою очередь можно разделить по
способу построения системы управления
на механизмы с контактным и
бесконтактным управлением.
 отличие от однооборотных многооборотные
механизмы, выходной вал которых
может осуществлять перемещение в
пределах нескольких, иногда
значительного количества, оборотов,
характеризуются также полным числом
оборотов выходного вала.
отличие от однооборотных многооборотные
механизмы, выходной вал которых
может осуществлять перемещение в
пределах нескольких, иногда
значительного количества, оборотов,
характеризуются также полным числом
оборотов выходного вала.
Минимальное время импульса управления, в секундах
Этот параметр при работе системы автоматического управления с электроприводом устанавливается с целью исключения слишком частого включения и выключения механизма и исключения чрезмерных и необоснованных пусков и остановок механизма, что может приводить к ускоренному износу шестерен и других кинематических узлов. Обычно это время принимается равным 0,2 с.
Очевидно, минимальное время импульса должно быть сопоставимо с временем выборки люфта. Если, тем не менее, после настройки контура управления процессом активность клапана чрезмерно высокая и он постоянно переключается на открытие и закрытие, то это время рекомендуется увеличить. С увеличением этого времени может возрасти погрешность управления. Чем меньше это время, тем более точное управление.
При настройке системы автоматического управления потребуется выбор компромиссного решения.