

8.2.2. Регулювання за збуренням
Захист колони від порушень витрати і складу початкової сировини може здійснюватися шляхом використання регулювання за збуренням [ 1,с.236-242 ]. Якщо необхідно регулювати якість обох продуктів, то коефіцієнт розділення повинен бути постійним. Тоді один контур цієї системи регулювання за збуренням регулюватиме підведення тепла Q у відповідь на зміну витрати початкової сировини.
![]()
де![]() -
розділення,
що відповідає заданим
значенням характеристик якості продукту,
a
F(t)
-
показує динамічну компенсацію
виміряної витрати початкової
сировини.
Якщо
-
розділення,
що відповідає заданим
значенням характеристик якості продукту,
a
F(t)
-
показує динамічну компенсацію
виміряної витрати початкової
сировини.
Якщо
![]() постійні,
то рівняння (8.14) можна
постійні,
то рівняння (8.14) можна
спростити:
![]()
Одне з рівнянь матеріального балансу, наприклад (8,3), можна використовувати для визначення другої регульованої змінної
![]()
Це
рівняння
є
особливо вдалим для
депропанізатора в прикладі 8.1, в якому
чистота
пропану![]() спільно
з його вмістом
спільно
з його вмістом![]() регулюються
за залишковим продуктом.
Як
і раніше, зірочки позначають
усталені значення регульованих величин,
а не
виміряні параметри.
регулюються
за залишковим продуктом.
Як
і раніше, зірочки позначають
усталені значення регульованих величин,
а не
виміряні параметри.
Якщо хі < 1%, то без великої втрати точності рівняння (8.16) можна спростити:
![]()
де т - регульований коефіцієнт. Для колони в прикладі 8.1 розрахункова величина т рівна 1,016. Це означає, що при використанні рівняння (8.17) помилка незначна.
Деякі
колони
не схильні до дії
різких і значних змін складу початкової
сировини. В цьому
випадку використання аналізаторів
для вимірювання z1/
і
z11 не
виправдане. Тоді
ці члени можуть бути
виключені з одночасним збільшенням
т
для
компенсації їх відсутності.
Коефіцієнти т
і![]() встановлюються
схемою
регулювання із зворотним
зв'язком з метою підтримки стаціонарними
заданих
значень параметрів
якості продукту. На рис. 8.4 зображена
така
система регулювання.
встановлюються
схемою
регулювання із зворотним
зв'язком з метою підтримки стаціонарними
заданих
значень параметрів
якості продукту. На рис. 8.4 зображена
така
система регулювання.
Динамічна компенсація f(t) зазвичай здійснюється введенням люфта у поєднанні із керуючою дією, що діє на випередження або із запізненням. Якщо початкова сировина не містить пари, то динамічні компенсатори ідентичні і реалізуються лише за допомогою люфта і блоку запізнення. По суті, вплив зміни витрати сировини розповсюджується у напрямі основи колони. Протидіюча цьому збуренню зміна кількості тепла, що підводиться, не повинна
починатися до моменту, поки вплив зміни витрати сировини не досягне основи колони. Після цього через невеликий інтервал часу регулювання підведення тепла внесе свій вплив у верхній частині колони. Отже, зміна витрати дистиляту може відбуватися практично одночасно із зміною кількості тепла, що підводиться.
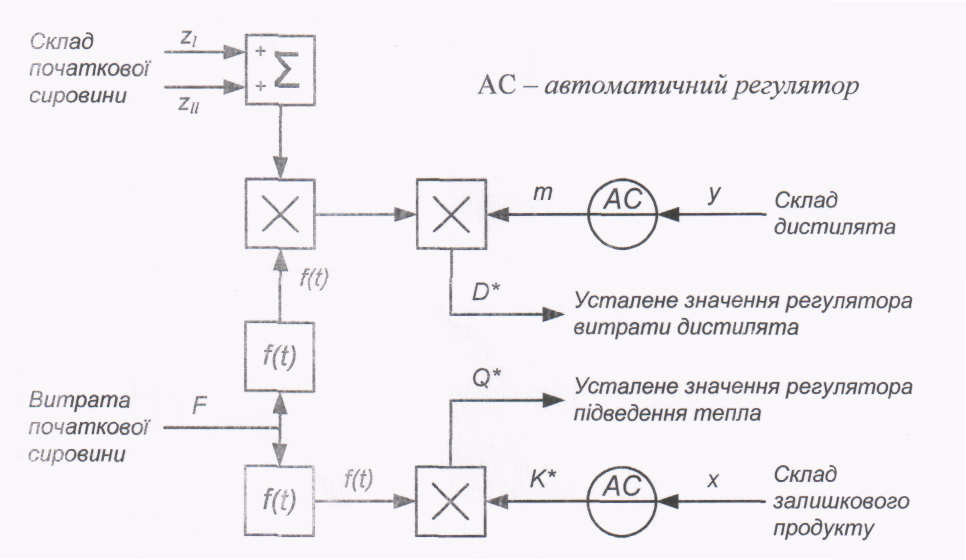
Рис. 8. 4. Система регулювання за величиною збурення, що застосовується для роботи колони в режимі мінімального споживання енергії
Проте, пара, що знаходиться в початковій сировині, прагне спрямуватись безпосередньо у верхню частину колони. Тому якщо сировина, хоча б частково, насичена парою, то динамічний компенсатор, що керує потоком дистиляту, повинен мати дуже малий люфт, так що потрібно буде формувати керуючу дію, з деяким випередженням. Питання динамічних компенсаторів та їх налаштування розглянуті в роботі [3, с. 211-219].
Якщо витрата залишкового продукту значно менша витрати дистиляту, то точність розрахунку матеріального балансу можна підвищити шляхом регулювання величини В замість D. В цьому випадку використовують рівняння (8.4) або його спрощену модифікацію. Налаштування значення т повинне надходити ланцюгом зворотного зв'язку від регулятора складу залишкового продукту. Тоді регулювання рівня в підставі колони повинне бути передане регулятору кількості тепла, що підводиться, а витрата дистиляту повинна управляти рівнем у верхньому колекторі. Витрата флегми займе при цьому місце витрати тепла при регулюванні складу дистиляту. Для отримання найбільш ефективної схеми регулювання, згідно роботи [ 1, с. 306 - 311], слід також розглянути взаємодію між обома контурами контролю якості продукту.
Коли з метою максимізацІЇ виходу продукту підведення тепла зафіксоване на якійсь верхній межі, то при зміні витрати початкової сировини змінюватиметься V/F і, як наслідок, розділення. Тоді при регульованій
величині![]() із
зміною F
буде
змінюватися х.
Внаслідок
цього величина D
перестає
лінійно
залежати від F
і
необхідно змінити рівняння матеріального
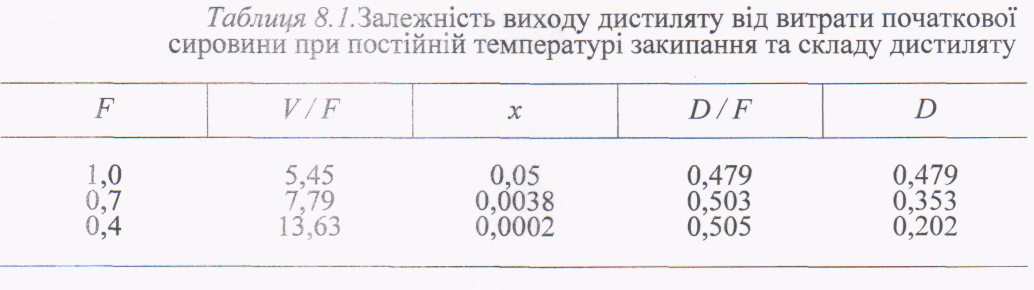
балансу. У табл. 8.1 приведені
витрати потоків і склад залишкового
продукту при деяких витратах початкової
сировини в пропан-пропиленовій колоні,
що має постійну швидкість випаровування
і чистоту дистиляту, регульовану на
рівні 99%. Графік залежності D
від
F
поданий
на рис. 8.5.
із
зміною F
буде
змінюватися х.
Внаслідок
цього величина D
перестає
лінійно
залежати від F
і
необхідно змінити рівняння матеріального
балансу. У табл. 8.1 приведені
витрати потоків і склад залишкового
продукту при деяких витратах початкової
сировини в пропан-пропиленовій колоні,
що має постійну швидкість випаровування
і чистоту дистиляту, регульовану на
рівні 99%. Графік залежності D
від
F
поданий
на рис. 8.5.
Для опису кривої нормального робочого режиму може бути використана проста параболічна модель:
![]()
де т - вихідний сигнал регулятора в ланцюзі зворотного зв'язку за складом, а к -коефіцієнт, що налаштовується, який визначає ступінь нелінійності кривої.
Рис.
8. 5. При постійному підведенні теплоти
із зміною витрати вихідної сировини
витрата дистиляту
 змінюється
нелінійно
змінюється
нелінійно
Схема динамічної компенсації в цій системі помітно відрізняється від схем компенсації тих систем, в яких регулюється підведення тепла. Відсутність швидкої реакції у відповідь на зміну температури випаровування вимагає додаткового контуру регулювання за збуренням для компенсації запізнення реакції у верхньому колекторі. Іншими словами, регулювання D буде впливати лише на баланс рідини і пари в колоні після того, як регулятор рівня колектора здійснить відповідні зміни потоку флегми. За наявності ж описуваного нижче ланцюга регулювання за збуренням зміна витрати флегми обов'язково відбуватиметься відразу за зміною витрати дистиляту
![]()
де тL - вихідний сигнал регулятора рівня в колекторі.
Якщо величину кL прийняти рівною одиниці, тоді L реагуватиме безпосередньо на зміну D, це дозволяє вилучити вплив інерційності колектора. Якщо величина kL дуже мала, тоді витрата флегми переважно відповідатиме вихідному сигналу mL регулятора рівня з відповідним запізненням. Проте якщо kL більше одиниці, то зміна витрата флегми буде більш значною за витрату дистиляту, це створює ефект випередження або запізнення.
Система регулювання, побудована на основі рівнянь (8.18) і (8.19), представлена на рис. 8.6.
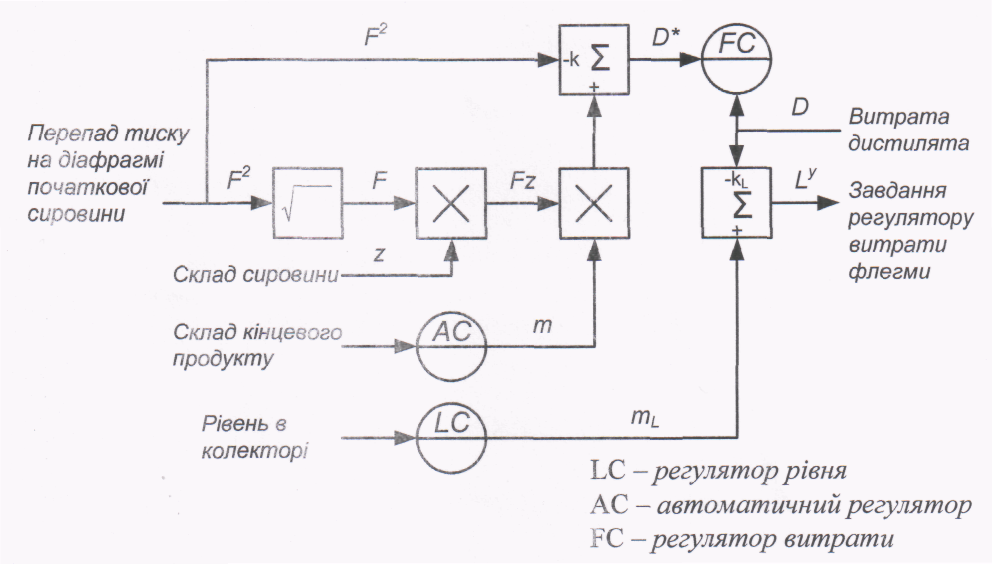
Рис. 8. 6. При сталому підведенні теплоти необхідна нелінійна модель з динамічною компенсацією, яку забезпечує колектор.