

7. Моделирование системы с учетом нелинейных свойств ид
Далее проводится рассмотрение влияния нелинейных свойств элементов на работу системы. В модель системы, на входе ИД, включается нелинейный элемент типа “усилитель с насыщением и зоной нечувствительности”, притом величина уровня насыщения выбирается равной 25% от максимального уровня управляющего воздействия, а величина зоны нечувствительности – 5% от максимального уровня управляющего воздействия.
Измененная модель контура скорости представлена на рис. 7.1.
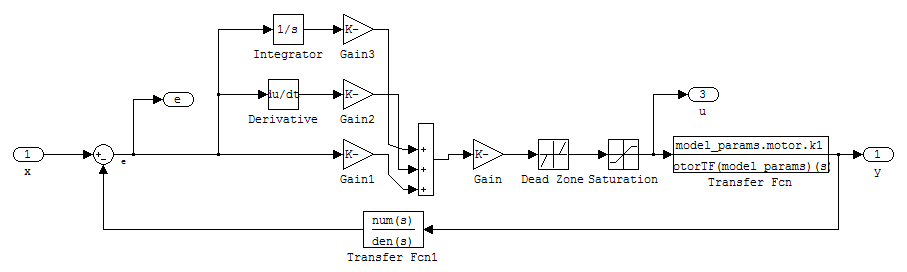
рис 7.1 – модель контура скорости с нелинейностью
7.1 Моделирование системы при возбуждении единичной ступенью
Переходная характеристика нелинейной системы приведена на рис. 7.2.

рис 7.2 – переходные процессы в нелинейной системе
Временные характеристики нелинейной системы:
ПИД-система
tр =0.26c
σ = 19%
eуст = 1.49е-4
ПИ-система
tр =0.47c
σ = 48%
eуст = 5.49е-13
Система осталась устойчивой, однако качество регулирования заметно ухудшилось. Появились пренебрежимо малые статические ошибки регулирования, отсутствовавшие в линейной модели.
7.2 Моделирование системы при значениях задающего воздействия и параметров насыщения, близких к реальным
Выбранный ИД имеет номинальное значение управляющего напряжения 110В. Величина напряжения насыщения принимается равной 1.5*110 = 165В. Величина зоны нечувствительности к управляющему напряжению принимается равной 0.3*110 = 33В. Величина управляющего воздействия соответствует повороту вала на πрадиан. Переходные процессы для обоих типов систем представлены на рис. 7.3.

рис 7.3 – переходные процессы при развороте на πрадиан
Обе системы теряют качество регулирования, а при большем уровне задачи – устойчивость. Такое поведение связано с наличием интегратора в составе регуляторов.
Существует возможность улучшить качество регулирования и обеспечить устойчивость системы при больших уровнях воздействия, для чего в регулятор контура скорости следует ввести нелинейность. Таким образом, меняется элементная база при реализации системы. Модель контура скорости усовершенствованной системы представлена на рис 7.4.

рис 7.4 – модель усовершенствованной системы
Суть улучшения состоит в том, что при достижении насыщения управляющим воздействием, прекращается интегрирование ошибки регулятором. Переходные процессы в усовершенствованной системе представлены на рис. 7.5.
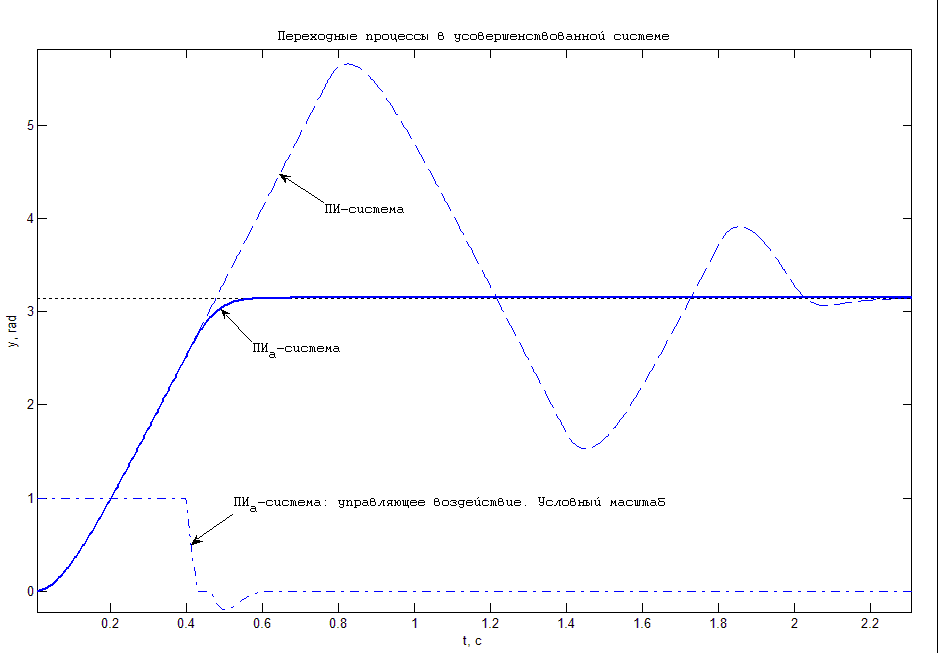
рис 7.5 – переходные процессы в улучшенной системе
Переходные процессы существенно улучшились, приблизившись к наилучшим (существует время, раньше которого выходная величина системы никак не может достигнуть нужного значения при данной величине насыщения управляющего воздействия). Обеспечена устойчивость системы при больших значениях задающего воздействия.
Для реализации данной системы, целесообразно реализовать регуляторы обоих контуров в промышленном контроллере, например, SiemensSIMATICS7-300, имеющем встраиваемые модули АЦП и ЦАП. Предлагаемая функциональная схема представлена на рис. 7.6.

рис 7.6 – предлагаемая функциональная схема системы
Таким образом, усовершенствованная система с ПИ-регулятором имеет лучшие показатели качества регулирования и устойчивости, и предлагается разработчиком для реализации.