

5. Моделирование системы
Компьютерное моделирование системы проводится в среде MatLab/Simulink.
Компьютерная модель системы содержит несколько вложенных друг в друга подсистем для гибкости настройки и удобства представления.
На рис 5.1 представлена модель контура скорости с регулятором.

рис 5.1 – модель контура скорости
При использовании ПИ-регулятора коэффициент усиления Gain2 приравнивается к нулю.
На рис. 5.2 представлена модель внешнего контура без регулятора.

рис 5.2 – модель внешнего контура без регулятора
На рис. 5.3 представлена модель, представляющая варианты системы при использовании ПИ- и ПИД-регулятора.

рис 5.3 – модель систем с ПИ- и ПИД-регуляторами
Система моделировалась при ступенчатых и кусочно-линейных задачах. Отработка именно таких задач – типичное предназначение систем программного управления.
Графики выходных реакций и ошибок (вообще, они симметричны) систем при ступенчатом воздействии представлены ни рис. 5.4.

рис 5.4 – графики выходных реакций и ошибок систем при ступенчатом воздействии
Графики реакций систем при кусочно-линейном задающем воздействии представлены на рис. 5.5

рис 5.5 – графики реакций на кусочно-линейное воздействие
Реакции систем на кусочно-линейную задачу мало отличаются друг от друга. Ошибка отработки ограничена.
6. Проверка чувствительности системы к изменению характеристик ид
Не существует устройств с точно заданными параметрами, неизменными во времени. Для гарантии работоспособности реальной системы нужно выявить ее чувствительность к вариациям характеристик ее элементов. Далее производится рассмотрение влияния изменения характеристик ИД (k1,Tэм,Tя) на устойчивость система и на качество переходных процессов.
На рис. 6.1, 6.2 отображены переходные процессы при изменении k1, на рис. 6.3, 6.4 – при изменении Тэм, на рис. 6.5, 6.6 – при изменении Тя.

рис 6.1 – переходные процессы при увеличении k1

рис 6.2 – переходные процессы при уменьшении k1

рис 6.3 – переходные процессы при увеличении Тэм

рис 6.4 – переходные процессы при уменьшении Тэм

рис 6.5 – переходные процессы при увеличении Тя
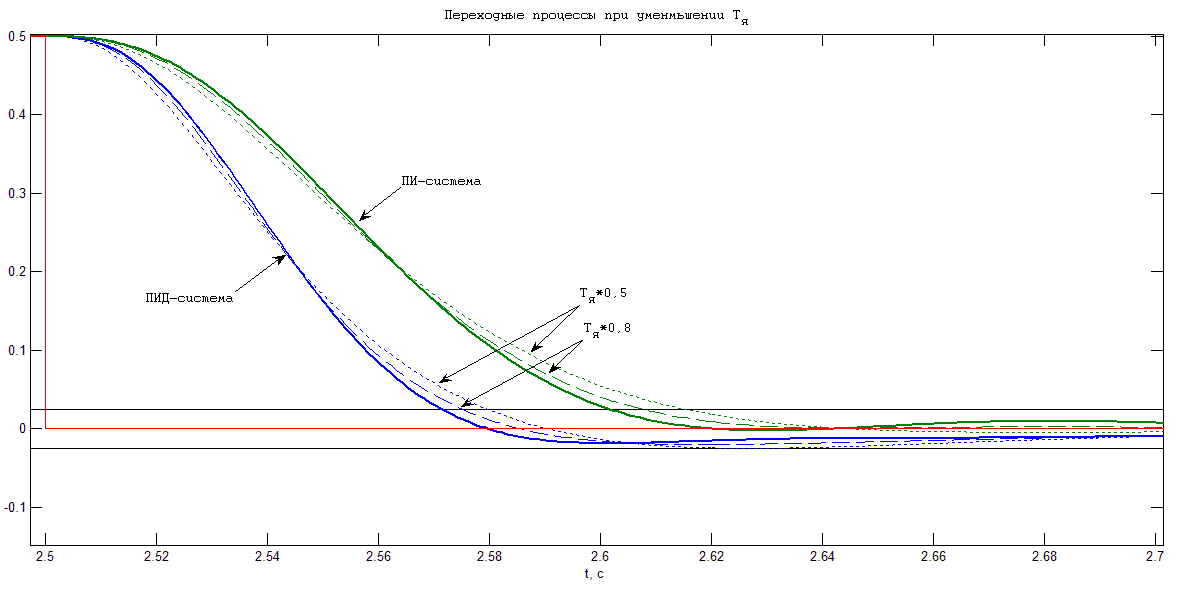
рис 6.6 – переходные процессы при уменьшении Тя
Система сохраняет устойчивость при изменениях параметров ИД в пределах ±50%. Изменения временных характеристик сведены в таблицу 6.1.
табл 6.1
|
параметр |
изменение % |
ПИД-система |
ПИ-система | ||
|
σ% |
tр |
σ% |
tр | ||
|
- |
- |
4.9 |
0.075 |
0.1 |
0.1 |
|
k |
-50 |
20 |
0.19 |
17 |
0.27 |
|
-20 |
9 |
0.14 |
6 |
0.16 | |
|
+20 |
2 |
0.07 |
0 |
0.1 | |
|
+50 |
2 |
0.09 |
0 |
0.16 | |
|
Тэм |
-50 |
2.5 |
0.1 |
0.5 |
0.15 |
|
-20 |
2.5 |
0.08 |
1 |
0.16 | |
|
+20 |
9 |
0.1 |
7 |
0.3 | |
|
+50 |
17 |
0.15 |
16 |
0.3 | |
|
Тя |
-50 |
5 |
0.08 |
0 |
0.12 |
|
-20 |
2.5 |
0.07 |
2.5 |
0.1 | |
|
+20 |
5 |
0.1 |
4 |
0.2 | |
|
+50 |
10 |
0.1 |
7.6 |
0.2 | |
Заметно, что ПИД-система реагирует на изменения параметров ИД большим перерегулированием, а ПИ-система – большей длительностью процессов.