

Введение
Целью данной курсовой работы является параметрический синтез системы программного управления тиристорным электроприводом, обеспечивающей требуемое качество управления, являющейся малочувствительной к вариациям параметров объекта регулирования (электродвигателя) и к проявлениям его нелинейных свойств.
Основные элементы проектируемой системы являются реально существующими техническими устройствами, что приближает курсовую работу к реальной инженерной практике. В заключительной части работы приведены результаты моделирования нелинейной системы с уровнями задающего воздействия и насыщения ИД, близкими к реальным, также выдвинуто предложение по изменению структуры системы, обеспечивающее улучшение качества регулирования.
1. Описание системы
Цифровая схема программного управления ЭП предназначена для управления угловым положением исполнительного органа, изменяя его по заранее известной программе.
Система содержит внутренний аналоговый контур регулирования скорости, стабилизирующий работу системы, и главный (внешний) цифровой контур регулирования углового положения вала редуктора. Принципиальная схема системы представлена на рис. 1.1.
р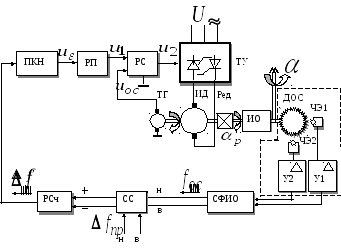 ис
1.1 Функциональная схема системы
ис
1.1 Функциональная схема системы
Исполнительный двигатель (ИД) управляется тиристорным усилителем мощности (ТУ), управляющее воздействие на который формирует по типовому закону регулятор скорости (РС). Датчиком обратной связи внутреннего контура является тахогенератор с фильтром, связанный с валом ИД. Вал ИД изменяет положение исполнительного органа (ИО) через редуктор (Ред). Выходная (регулируемая) величина – угол поворота α – измеряется импульсным датчиком положения (ДОС), который преобразует значение перемещения ИО в унитарный код. Чувствительные элементы ЧЭ1, ЧЭ2 и усилители У1, У2 преобразуют импульсы в электрические сигналы. Логическая схема формирования импульсов отработки (СФИО) формирует из них последовательность импульсов fос, которая сравнивается в схеме сравнения схемы, состоящей из схемы синхронизации (СС) и реверсивного счетчика (РСч). На входы СС поступает программная последовательностьfпр, с выхода РСч считывается разностная последовательность Δf=fпр–fос. Эта последовательность (сигнал рассогласования) преобразуется далее преобразователем «код-напряжение» (ПКН) в аналоговый сигнал рассогласованияue. Напряжение рассогласования воздействует на вход регулятора положения РП.
2. Структурная схема системы
Структурная схема линейной системы представлена на рис. 2.1.

рис 2.1 Структурная схема системы
При расчете системы, ее дискретные элементы представлены непрерывными звеньями.
Пояснения к элементам структурной схемы и их передаточные функции приведены в табл. 2.1. Параметры передаточных функций основных элементов представляют параметры выбранных в п. 8 реальных устройств, другие выбраны произвольно.
Таблица 2.1
|
Элемент системы |
Передаточная функция |
Параметры |
|
Исполнительный двигатель (ИД) |
|
k1 = 2.4 рад/с*В Тэм = 0.08 с Тя = 0.01 с |
|
Реверсивный тиристорный усилитель мощности (ТУ) |
|
|
|
Регулятор скорости (РС) |
ПИ-регулятор
ПИД-регулятор
|
Параметры подлежат расчету
|
|
Регулятор положения (РП) |
|
k4 подлежит расчету |
|
Преобразователь «код-напряжение» (ПКН) |
|
|
|
Редуктор |
|
|
|
Датчик импульсов (ДОС) вместе с СФИО |
|
|
|
Тахогенератор с фильтром (ТГ) |
|
k8 = 0.067 В*с/рад Тф = 0.01 с |
