

§ 22.2. Принцип действия магнитного усилителя
Для изучения принципа действия магнитного усилителя рассмотрим его простейшую схему (рис. 22.4, а, б), состоящую из двух обмоток. Одна обмотка — рабочая (или обмотка переменно-

го
тока) с числом витков![]() ,
другая — обмотка управления (или
управляющая) с числом витков
,
другая — обмотка управления (или
управляющая) с числом витков
![]() .
Обе обмотки размещены на общем
ферромагнитном замкнутом сердечнике.
На обмотку управления подается входной
сигнал в виде напряжения постоянного
тока
.
Обе обмотки размещены на общем
ферромагнитном замкнутом сердечнике.
На обмотку управления подается входной
сигнал в виде напряжения постоянного
тока
![]() или
тока
или
тока
![]() ,
подлежащего усилению. Последовательно
с рабочей обмоткой включена нагрузка
,
подлежащего усилению. Последовательно
с рабочей обмоткой включена нагрузка
![]() ,
напряжение на которой
,
напряжение на которой
![]() является
выходным сигналом усилителя. Цепь
рабочей обмотки получает питание от
источника напряжения переменного тока
(например, промышленной частоты 50 Гц).
Сердечник одновременно намагничивается
двумя полями: постоянным, созданным
током
является
выходным сигналом усилителя. Цепь
рабочей обмотки получает питание от
источника напряжения переменного тока
(например, промышленной частоты 50 Гц).
Сердечник одновременно намагничивается
двумя полями: постоянным, созданным
током
![]() ,
протекающим в обмотке
,
протекающим в обмотке
![]() ,
и переменным, созданным током
,
и переменным, созданным током
![]() ,
протекающим в обмотке
,
протекающим в обмотке
![]() .
Если принять сопротивление рабочей
обмотки чисто индуктивным
.
Если принять сопротивление рабочей
обмотки чисто индуктивным
![]() ,
а форму тока — близкой к
синусоидальной,
то ток в нагрузке
,
а форму тока — близкой к
синусоидальной,
то ток в нагрузке
![]()
Так
как
![]() ,
то
,
то
(22.4)
![]()
где![]() —угловая
частота питающего напряжения
—угловая
частота питающего напряжения
![]() ;
;
![]() —индуктивность
рабочей обмотки.
—индуктивность
рабочей обмотки.
Напряженность
магнитного поля в сердечнике создается
именно током
![]() .
Так как мы приняли допущение о
синусоидальности тока, то и напряженность
будет изменяться по синусоидальному
закону. Амплитудное значение напряженности
.
Так как мы приняли допущение о
синусоидальности тока, то и напряженность
будет изменяться по синусоидальному
закону. Амплитудное значение напряженности
![]()
(22.5)
где
![]() —средняя
длина пути магнитного потока в сердечнике.
Выразим из уравнения (22.4) индуктивность
рабочей обмотки:
—средняя
длина пути магнитного потока в сердечнике.
Выразим из уравнения (22.4) индуктивность
рабочей обмотки:
![]()
Подставим
сюда значение
![]() из
уравнения (22.2)
из
уравнения (22.2)
и
значение
![]() из
уравнения (22.5):
из
уравнения (22.5):
![]()
где![]() —динамическая
(или действующая) магнитная проницаемость
материала сердечника для переменной
составляющей магнитного поля:
—динамическая
(или действующая) магнитная проницаемость
материала сердечника для переменной
составляющей магнитного поля:
(22.7)
![]()
Так
как
с увеличением постоянной составляющей
индукции В0
амплитуда
индукции
![]() остается
неизменной, а
остается
неизменной, а
![]() растет
(см.рис. 22.3), то, согласно формулам (22.6)
и (22.7), проницаемость сердечника
растет
(см.рис. 22.3), то, согласно формулам (22.6)
и (22.7), проницаемость сердечника
![]() и
индуктивность
и
индуктивность
![]() рабочей
обмотки уменьшаются подмагничивании
сердечника постоянным магнитным полем.
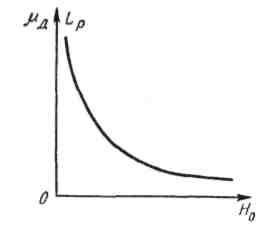
Характер зависимости
рабочей
обмотки уменьшаются подмагничивании
сердечника постоянным магнитным полем.
Характер зависимости![]() и
и![]() от
напряженности постоянного поля
от
напряженности постоянного поля
![]() при
при
![]() показан
на рис. 22.5.
показан
на рис. 22.5.
![]() определяется
током в обмотке управления:
определяется
током в обмотке управления:
![]() (22.8)
(22.8)

![]()
![]() ток
в цепи нагрузки
ток
в цепи нагрузки
![]() может
быть увеличен только за счет уменьшения
магнитной проницаемости
может
быть увеличен только за счет уменьшения
магнитной проницаемости
![]() для
переменной составляющей магнитного
поля, так как остальные параметры
(
для
переменной составляющей магнитного
поля, так как остальные параметры
(![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() )
не изменяются. Уменьшение магнитной
проницаемости
)
не изменяются. Уменьшение магнитной
проницаемости
![]() достигается
за счет увеличения постоянного
подмагничивающего поля в сердечнике,
создаваемого управляющим током
достигается
за счет увеличения постоянного
подмагничивающего поля в сердечнике,
создаваемого управляющим током
![]() в
соответствии с уравнением (22.8).
в
соответствии с уравнением (22.8).
При
изменении тока нагрузки
![]() будет
изменяться и падение напряжения
будет
изменяться и падение напряжения![]() на
нагрузке
на
нагрузке
![]() ,
т. е. выходной сигнал. Мощность, выделяемая
в нагрузке, может во много раз превышать
мощность, расходуемую в управляющей
обмотке, т. е. схема обладает усилительными
свойствами и ее можно рассматривать
как простейший магнитный усилитель.
Такой усилитель называют еще дроссельным,
поскольку изменение тока в нагрузке
обеспечивается за счет изменения
индуктивности рабочей обмотки, т. е.
сопротивления дросселя — катушки с
сердечником (рис. 22.6).
,
т. е. выходной сигнал. Мощность, выделяемая
в нагрузке, может во много раз превышать
мощность, расходуемую в управляющей
обмотке, т. е. схема обладает усилительными
свойствами и ее можно рассматривать
как простейший магнитный усилитель.
Такой усилитель называют еще дроссельным,
поскольку изменение тока в нагрузке
обеспечивается за счет изменения
индуктивности рабочей обмотки, т. е.
сопротивления дросселя — катушки с
сердечником (рис. 22.6).
Рассмотренная
схема по рис. 22.4 имеет серьезные недостатки
и крайне редко применяется на практике.
Дело в том, что замыкающийся по сердечнику
переменный магнитный поток наводит в
обмотке управления (как во вторичной
обмотке трансформатора) переменную
ЭДС. Поэтому выходной сигнал может
влиять на входной. А усилители должны
обладать однонаправленностью действия:
только от входа к выходу. Для уменьшения
значения переменного тока, протекающего
по цепи управления под влиянием наведенной
ЭДС, последовательно с управляющей
обмоткой
![]() включают большую индуктивность
включают большую индуктивность
![]() .
Однако при этом увеличивается инерционность
усилителя: при быстрых изменениях
входного напряжения ток управления
изменяется медленно. Кроме того,
увеличивается расход материала (так
как необходим сердечник и для дросселя),
возрастают габариты и вес усилителя.
Другим недостатком рассмотренной схемы
является то, что форма тока в нагрузке
существенно отличается от синусоиды,
что видно по кривой 2'
на
рис. 22.3.
.
Однако при этом увеличивается инерционность
усилителя: при быстрых изменениях
входного напряжения ток управления
изменяется медленно. Кроме того,
увеличивается расход материала (так
как необходим сердечник и для дросселя),
возрастают габариты и вес усилителя.
Другим недостатком рассмотренной схемы
является то, что форма тока в нагрузке
существенно отличается от синусоиды,
что видно по кривой 2'
на
рис. 22.3.
Для уничтожения ЭДС, наводимой в обмотке управления, ис-

пользуются
схемы магнитных усилителей с двумя
одинаковыми сердечниками
(рис. 22.7, а,
б). Такие
схемы составлены из схем по
рис. 22.4 как из типовых элементов, что
особенно хорошо видно
на рис. 22.7, а.
Рабочая
обмотка
![]() и
обмотка управления
и
обмотка управления![]() имеют
по две секции — по одной на каждом
сердечнике. Секции управляющей
обмотки
имеют
по две секции — по одной на каждом
сердечнике. Секции управляющей
обмотки
![]() соединяются
последовательно и встречно;
следовательно, происходит взаимное
вычитание ЭДС, индуцируемых
в каждой секции. Поскольку сердечники
и соответствующие обмотки на них
одинаковы, происходит взаимное уничтожение
(компенсация) ЭДС, наведенных переменным
магнитным полем.
Секции рабочей обмотки
соединяются
последовательно и встречно;
следовательно, происходит взаимное
вычитание ЭДС, индуцируемых
в каждой секции. Поскольку сердечники
и соответствующие обмотки на них
одинаковы, происходит взаимное уничтожение
(компенсация) ЭДС, наведенных переменным
магнитным полем.
Секции рабочей обмотки
![]() включены
последовательно и согласно.
В один полупериод питающего переменного
напряжения
включены
последовательно и согласно.
В один полупериод питающего переменного
напряжения
![]() переменный
магнитный поток
переменный
магнитный поток![]() складывается
с постоянным
складывается
с постоянным
магнитным
потоком
![]() в
одном сердечнике и вычитается в другом
сердечнике. В следующем полупериоде
сердечники меняются ролями.
Таким образом, совместное действие на
цепь нагрузки обеих
секций рабочих обмоток в каждый из
полупериодов совершенно
одинаково. Обе полуволны нагрузки будут
симметричны (без
четных гармоник), т. е. форма кривой тока
будет менее искажена,
чем в схеме с одним сердечником (см. рис.
22.3).
в
одном сердечнике и вычитается в другом
сердечнике. В следующем полупериоде
сердечники меняются ролями.
Таким образом, совместное действие на
цепь нагрузки обеих
секций рабочих обмоток в каждый из
полупериодов совершенно
одинаково. Обе полуволны нагрузки будут
симметричны (без
четных гармоник), т. е. форма кривой тока
будет менее искажена,
чем в схеме с одним сердечником (см. рис.
22.3).