

§ 1.5. Обратная связь в системах автоматики
В системах автоматики различают последовательное и параллельное соединения элементов, а также соединение с обратной связью. При последовательном соединении выходной сигнал одного элемента является входным сигналом для последующего элемента. При параллельном соединении один и тот же сигнал является входным для двух элементов, а их выходные сигналы суммируются.
Общий
коэффициент преобразования двух
последовательно соединенных элементов
цепи равен произведению коэффициентов
преобразования
этих элементов:
![]() Общий
коэффициент преобразования
двух параллельно соединенных элементов
равен сумме
коэффициентов преобразования каждого
из этих элементов.
Общий
коэффициент преобразования
двух параллельно соединенных элементов
равен сумме
коэффициентов преобразования каждого
из этих элементов.
При
соединении с обратной связью выходной
сигнал одного элемента
подается на его вход через элемент
обратной связи. На рис.
1.4 показано соединение с обратной связью.
Кружком, разделенным
на четыре сектора, показано устройство,
в котором происходит
суммирование сигналов. Если сектор
зачернен, то поступающий
сигнал берется со знаком минус. В
зависимости от знака сигнала обратной
связи различают положительную
и
отрицательную
обратную
связь. На рис. 1.4, а
показано
соединение с положительной
обратной связью, на рис. 1.4, б
—
с отрицательной обратной
связью. Элемент 1
включен
в прямую цепь, элемент 2
—
в обратную.
Можно сказать, что элемент 1
охвачен
обратной связью. Коэффициент
преобразования при соединении с обратной
связью.
На
вход элемента 1
поступает
входной сигнал
![]() где
знак плюс соответствует положительной
обратной связи,
где
знак плюс соответствует положительной
обратной связи,
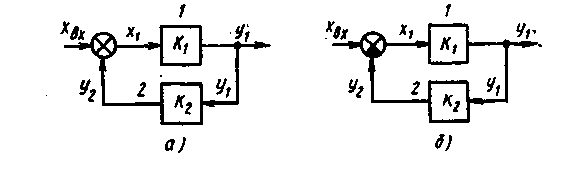
Рис. 1.4. Соединение элементов с обратной связью
а знак минус — отрицательной. Выходной сигнал элемента 1 равен произведению его входного сигнала на коэффициент преобразования:
![]()
Этот
сигнал поступает на вход элемента 2,
включенного
в цепь обратной
связи. Следовательно, выходной сигнал
элемента 2
можно
получить умножив сигнал![]() на
коэффициент преобразования элемента
2:
на
коэффициент преобразования элемента
2:![]() Подставив
значение
Подставив
значение
![]() в
выражение для
в
выражение для
![]() т.
е.
т.
е.![]() и
преобразовав его, получим
и
преобразовав его, получим
![]() или
или
![]()
Общий
коэффициент преобразования по определению
равен отношению
выходного сигнала ко входному. В данном
случае выходным
является сигнал у1
а
входным—![]() Их
отношение
Их
отношение
![]() Теперь
в этом выражении знак минус соответствует
положительной обратной связи, а знак
плюс — отрицательной.
Теперь
в этом выражении знак минус соответствует
положительной обратной связи, а знак
плюс — отрицательной.
Проанализируем выражение для коэффициента преобразования при положительной обратной связи
Пусть
в цепь включен усилитель с
коэффициентом усиления 10, т. е.![]() Малую
часть его выходного сигнала (например,
5%) снова подадим на вход, включив для
этого в цепь обратной связи элемент с
коэффициентом преобразования
Малую
часть его выходного сигнала (например,
5%) снова подадим на вход, включив для
этого в цепь обратной связи элемент с
коэффициентом преобразования
![]()
Таким образом, благодаря положительной обратной связи получен более высокий коэффициент усиления. Положительная обратная связь чаще всего используется в усилительных элементах автоматики.
С помощью положительной обратной связи может быть получена и релейная характеристика. Использование положительной обратной связи в магнитных усилителях и бесконтактных магнитных реле рассмотрено в гл. 23 и 26.
На
принципе отрицательной обратной связи
основана работа систем автоматического
регулирования (САР). Покажем это на
примере
элемента сравнения ЭС, в котором
происходит вычитание
выходного сигнала y(t)
из
входного сигнала g(t)
(см.
рис. 1.1,
в).
Именно благодаря отрицательной обратной
связи и обеспечивается автоматическое
поддержание регулируемой величины на
заданном уровне. Ведь благодаря
отрицательной обратной связи
постоянно определяется отклонение y(t)
от
g(t)
и
вырабатывается
соответствующее этому отклонению
регулирующее воздействие.
В САР в цепь обратной связи включен
датчик. Усилительные
и исполнительные элементы автоматики
включены в прямую цепь.
Пусть коэффициенты преобразования всех
элементов, включенных
в прямую цепь, можно учесть, введя общий
коэффициент преобразования
![]() а
датчик имеет коэффициент преобразования
а
датчик имеет коэффициент преобразования
![]() Тогда
в установившемся режиме общий коэффициент
преобразования
САР
Тогда
в установившемся режиме общий коэффициент
преобразования
САР
![]()
При
достаточно большом усилении можно
принять
![]() и
и
![]()
Как видим, коэффициент преобразования САР полностью определяется коэффициентом преобразования датчика. Следовательно, именно от точности датчика зависит точность всей работы САР. Поэтому датчикам в системах автоматики, а также их метрологическим характеристикам, надежности придается особое значение. Наличие же обратной связи имеет важнейшее значение не только в автоматике, но и в биологических, экономических и социальных системах.