

6.Специальная часть
6.1. Математическая модель опоры самолета
Исследование колебаний модели воздушного судна можно выполнить на основе его упрощенной схемы, которая отражает с некоторыми допущениями особенности конструкции опоры шасси и взаимодействие основных частей воздушного судна. Исследование только низкочастотного диапазона позволяет существенно упростить расчетную схему и представить основную опору воздушного судна, в виде системы, состоящей из ряда динамических масс, соединенных безинерционными упругими и демпфирующими элементами. При составлении математической модели воздушного судна введем следующие допущения и понятия:
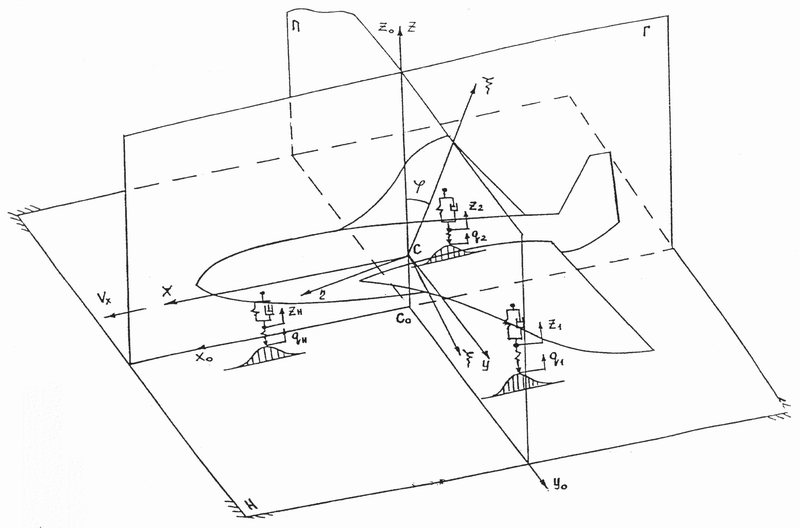
Рисунок 12
Горизонтальная плоскость Н – плоскость поверхности аэродрома, от которой отсчитываются ординаты высот микропрофиля;
Ось элемента аэродрома;
Продольная вертикальная плоскость Г, проходящая через ось элемента аэродрома (продольная плоскость);
Поперечная вертикальная плоскость П, проходящая через центр масс воздушного судна перпендикулярно продольной плоскости;
Подвижная система координат C0X0Y0Z0; началом системы служит точка С0 проекция центра масс фюзеляжа С на горизонтальную плоскость Н, осями С0Х0 , С0Y0 ,C0Z0 - линии пересечения плоскостей П, Г и Н;
Подвижная система координат C, неизменно связанная с фюзеляжем; начало этой системы находится в центре масс фюзеляжа; оси ориентированы таким образом, что при отсутствии колебаний воздушного судна оси С, и С горизонтальны и лежат в продольной П и поперечной Г плоскостях, а ось С совпадает с осью С0Z;
Вспомогательные подвижные системы координат, оси которых параллельны осям главной системы, а начало находится в центрах масс соответствующих элементов воздушного судна (подрессоренных и неподрессоренных масс); вспомогательные подвижные системы координат движутся поступательно.
При составлении математической модели воздушного судна введем следующие допущения:
Фюзеляж воздушного судна представляет собой твердое тело, деформациями на кручение и изгиб которого можно пренебречь. Такое допущение в случае линейной модели приводит к взаимной независимости угловых колебаний в продольной и поперечной плоскостях;
Центр масс все время находится в продольной плоскости и перемещается так, что проекция его скорости на плоскость Н остается постоянной. Движение воздушного судна принято установившемся, т.е. его скорость постоянна, а центр масс перемещается по отношению к плоскости C0X0Y только по нормали, т.е. продольно-поступательные колебания фюзеляжа исключены;
Влияние продольных и поперечных реакций поверхности аэродрома на колебания масс воздушного судна отсутствует. Данное допущение непосредственно связано со вторым и вполне целесообразно, поскольку при прямолинейном движении воздушного судна нормальные силы существенно превышают поперечные и продольные;
Оси главных опор перемещаются в плоскостях, перпендикулярных к плоскости С; траектории движения центров масс – прямые, нормальные к плоскости С, что исключает возможность поворота опор относительно осей, перпендикулярных к плоскости фюзеляжа. Моментами инерции опор относительно осей вращения можно пренебречь, так как они малы и практически не влияют на параметры вертикальных колебаний воздушного судна;
Неуравновешенность и гироскопические моменты вращающихся масс опор и двигателей равны нулю. Данное допущение, является общепринятым при исследовании колебаний модели воздушного судна, за исключением случая, когда рассматриваются колебания его управляемых колес. Неуравновешенность масс опоры и двигателей проявляется только при рассмотрении высокочастотных вибраций;
Колебания масс воздушного судна малы. Данное допущение не следует понимать как линеаризацию дифференциальных уравнений колебаний динамической системы относительно положения равновесия. Уравнения остаются нелинейными, из них только исключается члены, имеющие вторую степень малости относительно обобщенных координат и скоростей, а тригонометрические функции углов заменяются значениями самих углов;
Контакт шины с поверхностью аэродрома точечный. Данное допущение позволяет заменить равномерно распределенную по площади контакта шины нагрузки сосредоточенной силой;
Вертикальные колебания главных и носовой опоры можно рассматривать независимо друг от друга. Для этого необходимо, чтобы удовлетворялось условие:
 ;
где a и b -
расстояния от центра тяжести модели
воздушного судна до опор;
- приведенный радиус инерции воздушного
судна;
;
где a и b -
расстояния от центра тяжести модели
воздушного судна до опор;
- приведенный радиус инерции воздушного
судна;
 ;
где
;
где
 и
и
 - приведенный момент инерции и масса
судна.
- приведенный момент инерции и масса
судна.
Данное допущение может быть принято в связи с тем, что обычно более 90% веса приходится на главные опоры самолета.
Получить формулы для аналитического расчета параметров колебаний даже линейной модели воздушного судна по полной расчетной схеме не удается. Однако существует ряд частных задач, которые могут быть решены аналитически. Для линейной модели решение будет точным, а для нелинейной – приближенным. В таких задачах вполне достаточно ограничиться рассмотрением одно- или двухмассовой расчетной схемы вертикальных колебаний воздушного судна. Рассмотрим простейшую двухмассовую модель воздушного судна с двумя степенями свободы:
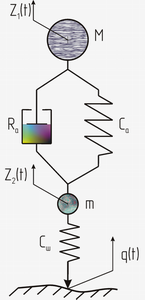
Рисунок 13
Где М – масса планера, приходящаяся на главную опору;
m – масса опоры планера;
Z1(t) - траектория вертикальных колебаний центра тяжести модели планера;
Z2(t) - траектория вертикальных колебаний центра колеса;
q(t) - траектория вертикальных колебаний движения опоры (возмущение микропрофиля);
Ra(t) - демпфирование амортизатора;
Ca(t) - жесткость амортизатора стойки;
Cш(t) - жесткость авиашины.
Динамическое равновесие принятой модели описывается следующей системой дифференциальных уравнений:
 (10)
(10)