

Передаточная функция возмущения-
1.3 Анализ системы
Л АЧХ
и ЛФЧХ системы представлены на рисунке
1.3.1 а) и 1.3.1 б) соответственно.
АЧХ
и ЛФЧХ системы представлены на рисунке
1.3.1 а) и 1.3.1 б) соответственно.
а)
б)
Рисунок 1.3.1
Полученная система имеет следующие показатели качества:
запас устойчивости по амплитуде ΔL= 19.55 дБ;
запас устойчивости по фазе Δφ= 65.5º;
частота среза ωср=1.2 рад/c.
Реакция замкнутой системы на ступенчатое воздействие представлена на рисунке 1.3.2

Рисунок 1.3.2
Полученная система имеет следующие показатели качества:
перерегулирование σ = 89%;
время регулирования tр =206.8 с.
Для того, чтобы улучшить показатели качества системы необходимо рассчитать и ввести ПИ- или ПИД-регулятор.
2. Расчет параметров типовых регуляторов
2.1 ПИ-регулятор
Расчет производим методом подбора параметров. Рассматривая ЛАЧХ разомкнутой системы, стремимся к максимуму косвенных показателей качества – запаса устойчивости по амплитуде ΔL, запаса устойчивости по фазе Δφ и частоты среза ωср. Подобранный таким способом ПИ-регулятор имеет следующие параметры:
![]() ;
;
![]() .
.
![]()
Л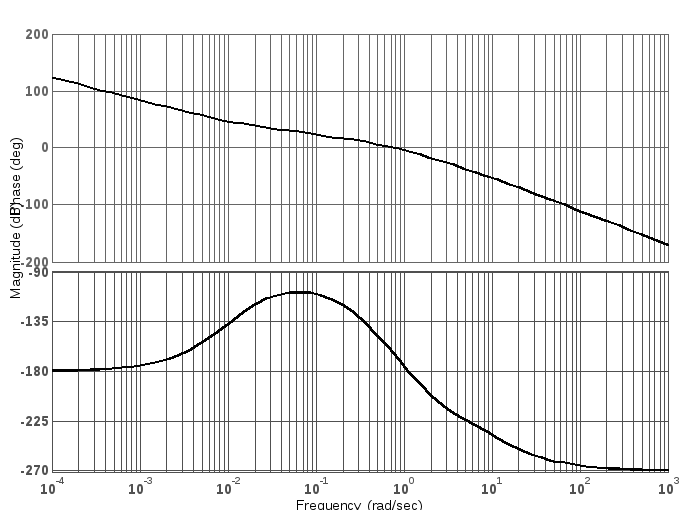 АЧХ
и ЛФЧХ разомкнутой системы с ПИ-регулятором
представлены на рисунке 2.1.1 а) и 2.1.1 б)
соответственно.
АЧХ
и ЛФЧХ разомкнутой системы с ПИ-регулятором
представлены на рисунке 2.1.1 а) и 2.1.1 б)
соответственно.
а)
б)
Рисунок 2.1.1
Полученная система имеет следующие показатели качества:
запас устойчивости по амплитуде ΔL= 6.52 дБ;
запас устойчивости по фазе Δφ= 15.57º;
частота среза ωср=1.14 рад/c.
Реакция замкнутой системы на ступенчатое воздействие представлена на рисунке 2.1.2

Рисунок 2.1.2
Полученная система имеет следующие показатели качества:
перерегулирование σ = 64.37%;
время регулирования tр =28.6 с.
По сравнению с исходной системой время регулирования уменьшилось более чем в семь раз. Однако перерегулирование остается по прежнему высоким.
2.2 ПИД-регулятор
Расчет производим аналогично расчету ПИ-регулятора. Подобранный таким способом ПИД-регулятор имеет следующие параметры:
![]() ;
;
![]()
![]()
![]()
Л АЧХ
и ЛФЧХ разомкнутой системы с ПИД-регулятором
представлены на рисунке 2.2.1 а) и 2.1.1 б)
соответственно.
АЧХ
и ЛФЧХ разомкнутой системы с ПИД-регулятором
представлены на рисунке 2.2.1 а) и 2.1.1 б)
соответственно.
а)
б)
Рисунок 2.2.1
Полученная система имеет следующие показатели качества:
запас устойчивости по амплитуде ΔL= 60.25 дБ;
запас устойчивости по фазе Δφ= 64.59º;
частота среза ωср=1.42 рад/c.
Реакция замкнутой системы на ступенчатое воздействие представлена на рисунке 2.1.2

Рисунок 2.1.2
Полученная система имеет следующие показатели качества:
перерегулирование σ = 5.2 %;
время регулирования tр =2.2 с.
Использование ПИД-регулятора позволяет снизить время регулирования в четырнадцать раз по сравнению с ПИ-регулятором, и добиться приемлемого перерегулирования. Следовательно, при компьютерном моделировании будем рассматривать систему с ПИД-регулятором.
3. Моделирование линейной модели системы
М оделирование
проводим в среде МАТLАВ/SIMULINK.
Линейная модель системы представлена
на рисунке 3.1
оделирование
проводим в среде МАТLАВ/SIMULINK.
Линейная модель системы представлена
на рисунке 3.1
Рисунок 3.1
Так как идеальное дифференцирующее звено является физически нереализуемым, то при моделировании ПИД-регулятора заменяем это звено на реальное дифференцирующее с ПФ
![]()