

Министерство образования и науки Российской Федерации
Санкт-Петербургский государственный электротехнический университет
«ЛЭТИ»
Факультет компьютерных технологий и информатики
Кафедра автоматики и процессов управления
Пояснительная записка
к курсовому проекту по дисциплине
ЛОКАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
на тему №7
“Электромашинная следящая система управления скоростью”
Преподаватель: проф. Терехов В. А.
Выполнили: студенты гр. 2321
Терехов А.К.
Творун Д.П.
Санкт-Петербург
2005
Оглавление
Введение ………………………………………………………………………. 1
1. Описание системы ………………………………………………………… 2
2. Структурная схема системы ……………………………………………. 1
3. Требования, предъявляемые к ЭСС
4. Анализ системы
4.1 Определение общего вида передаточных функций
4.2 Расчет статического режима
4.3 Обеспечение устойчивости системы
4.4 Метод асимптотических ЛАЧХ
5. Моделирование линейной системы
5.1 Моделирование системы по возмущающему воздействию
5.2 Моделирование по возмущающему воздействию
6. Анализ чувствительности
7. Моделирование и анализ ЭЭС с учетом нелинейного элемента
Вывод
Список использованной литературы
Введение.
Целью данной работы является параметрический синтез топологически заданной электромашинной следящей системы (ЭСС) управления скоростью, обеспечивающий ее устойчивую работу с требуемыми статическими и динамическими характеристиками. При этом должна обеспечиваться грубость системы в заданных пределах.
Кроме того будет проведено моделирования ЭСС с учетом нелинейности одного из ее элементов, с целью оценки влияния нелинейности на изменение переходных характеристик системы по входному и возмущающему воздействиям, по сравнению с линейным режимом.
1. Описание системы.
Функциональная схема ЭСС представлена на рис. 1.
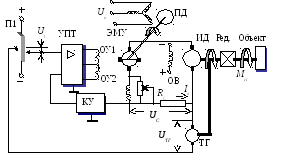
Рис. 1. Функциональная схема ЭСС.
Регулируемая
величина – скорость вращения вала двигателя
![]() измеряется тахогенератором постоянного
тока ТГ. Выходное напряжение ТГ
измеряется тахогенератором постоянного
тока ТГ. Выходное напряжение ТГ![]() сравнивается
с напряжением задатчика скорости
потенциометра П1. Напряжение
сравнивается
с напряжением задатчика скорости
потенциометра П1. Напряжение
![]() пропорционально
значению задаваемой скорости
пропорционально
значению задаваемой скорости![]() .
Силовая часть ЭСС мощностью до 100 кВт
образована по схеме "электромашинный
усилитель (ЭМУ) поперечного поля -
исполнительный двигатель (ИД) постоянного
тока".
.
Силовая часть ЭСС мощностью до 100 кВт
образована по схеме "электромашинный
усилитель (ЭМУ) поперечного поля -
исполнительный двигатель (ИД) постоянного
тока".
Объект создает
на исполнительном валу ЭСС момент
нагрузки
![]() .
Преобразование скорости
.
Преобразование скорости![]() вращения вала ИД в скорость вращения
вала объекта осуществляется редуктором
(Ред).
вращения вала ИД в скорость вращения
вала объекта осуществляется редуктором
(Ред).
ЭМУ приводится во вращение кинематически связанным с ним приводным двигателем ПД (например, трехфазным асинхронным двигателем).
Обмотки управления
OУ1, OУ2 ЭМУ питаются от усилителя
постоянного тока (УПТ). ЭМУ является
усилителем мощности и питает якорную
цепь ИД. Исполнительный вал ИД
кинематически связан с валом тахогенератора
(ТГ). Для обеспечения устойчивости
ЭСС используется сигнал ![]() внутренней отрицательной обратной
связи (ООС) по току
внутренней отрицательной обратной
связи (ООС) по току![]() якоря
ИД через сопротивление
якоря
ИД через сопротивление![]() ,
который поступает на вход УПТ через
корректирующее устройство (КУ).
,
который поступает на вход УПТ через
корректирующее устройство (КУ).
Таким образом, на
входе УПТ суммируются сигнал ![]() ,
пропорциональный требуемой скорости
,
пропорциональный требуемой скорости![]() ,
и сигнал коррекции
,
и сигнал коррекции![]() .
УПТ и ЭМУ вырабатывают напряжение
управления якорной обмоткой ИД,
пропорциональное скорости
.
УПТ и ЭМУ вырабатывают напряжение
управления якорной обмоткой ИД,
пропорциональное скорости![]() ,
а напряжение
,
а напряжение![]() стабилизирует работу ЭСС при изменении
момента
стабилизирует работу ЭСС при изменении
момента![]() объекта.
объекта.