

5. Моделирование системы.
Составление
программной модели исследуемой
системы и ее моделирование проводилось
в среде MATLAB\Simulink.
В ходе предварительного моделирования
были уточнены параметры корректирующего
устройства:![]() .
.
5.1. Моделирование линейной модели по задающему воздействию.
Программная модель, моделирующая линейную систему приведена на рис. 5.1.
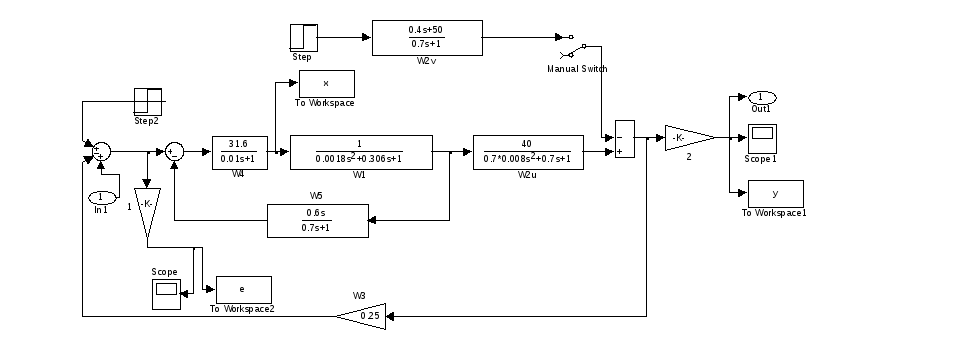
Рис. 5.1. Программная модель линейной системы.
Рассмотрим реакцию системы при подаче на вход единично-ступенчатого воздействия (рис. 5.2.). При этом на вход системы подается скачок, величиной 1 вольт, который должен разогнать вал исполнительного двигателя до 38,2 об/мин.
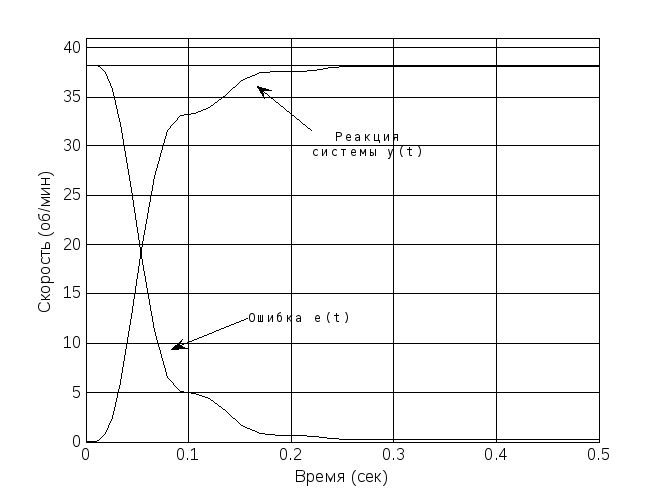
Рис. 5.2. Реакция системы на ступенчатое воздействие.
Перерегулирование
-
![]() =0
%
=0
%
Время регулирования
- ![]() =0,146 сек.
=0,146 сек.
Статическая ошибка стабилизации – 0,121 об/мин.
Все полученные, из переходных процессов, показатели качества полностью соответствуют требованиям, которые выше были предъявлены к ЭСС. На наш взгляд не имеет смысла рассматривать графики переходных процессов при подаче на вход линейно нарастающего и квадратичного воздействий, т.к. моделируемая система является статической и, следовательно, установившиеся ошибки, будут бесконечно большими. Поэтому рассмотрим несколько других вариантов входного воздействия.
На вход системы подается напряжение, линейно нарастающее до 1 вольта(рис. 5.3).
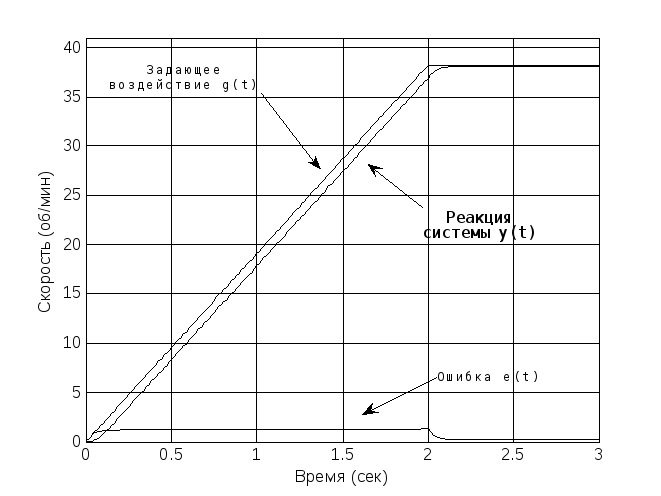
Рис. 5.3. Реакция системы на линейно нарастающее до 1 вольта напряжение.
Максимальное значение ошибки = 1,32 об/мин.
Статическая ошибка – 0,121 об/мин.
На вход системы подается напряжение, нарастающее по параболе до 1 вольта (рис. 5.4.).

Рис.5.4. Реакция системы на нарастающее по параболе до 1 вольта напряжение.
Максимальное значение ошибки - 2.5 об/мин.
Статическая ошибка – 0,121 об/мин.
На вход системы подается синусоида с частотой 1 рад/сек и амплитудой 1 вольт (рис. 5.5.).
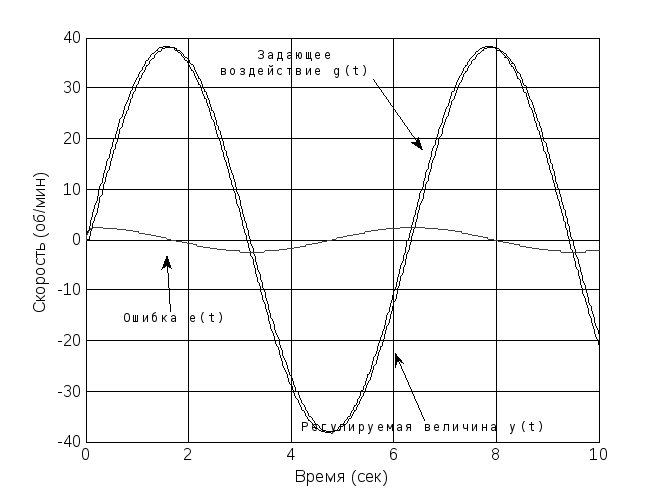
Рис. 5.5. Реакция системы на синусоидальное воздействие.
Максимальное значение динамической ошибки – 2.4 об/мин.
5.2. Моделирование линейной модели по возмущающему воздействию.
При моделировании системы по возмущающему воздействию, отключим управляющее. На вход ПФ исполнительного двигателя по возмущению подадим ступеньку, соответствующую максимальному значению нагрузки в разрабатываемой ЭСС – 0,5 Нм. Переходный процесс представлен на рис. 5.6.
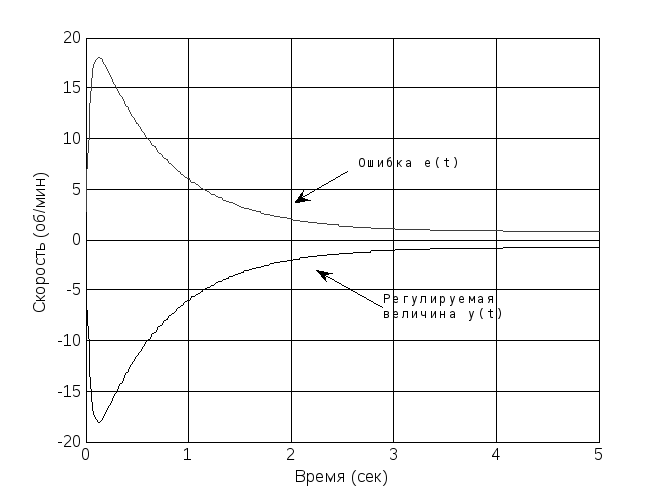
Рис. 5.6. Реакция системы на возмущающее воздействие.
Анализируя переходный процесс можно утверждать, что система, хотя и обладает устойчивостью к возмущению и ошибка по возмущению стремиться к конечному (соответствующему требованиям) числу, но по своей амплитуде, является не приемлемой для работы ЭЭС на малых скоростях. Поэтому, необходимо уменьшить максимальную амплитуду ошибки, как минимум в два раза.
Для решения поставленной задачи введем в систему второй канал по возмущающему воздействию. Передаточная функция по возмущению будет иметь вид:
![]()
где
![]() -
ПФ звена, вводимого во второй канал
-
ПФ звена, вводимого во второй канал
Т.о. условие
инвариантности будет достигнуто при
![]()
Возмущающее
воздействие имеет только первую
производную, поэтому смысл имеет ПФ
вида
![]() =1.25.
=1.25.
Программная модель, после введения второго канала по возмущению представлена на рис. 5.7.
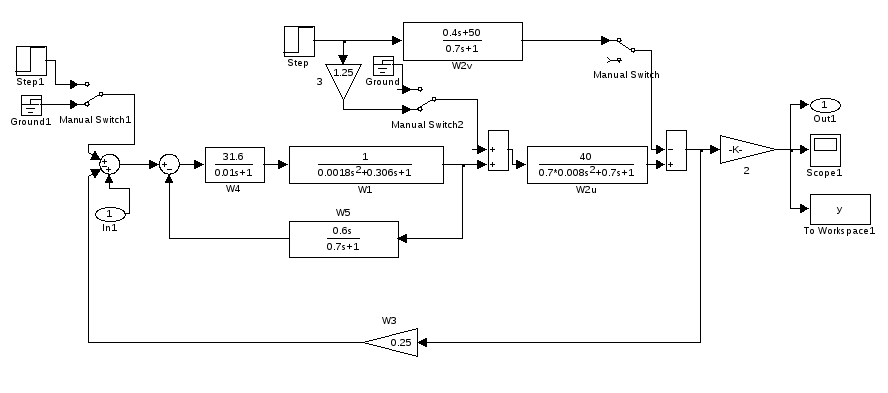
Рис. 5.7. Программная модель системы со вторым каналом по возмущению.
Рассмотрим график переходного процесса после введения второго канала по возмущению (рис. 5.8.)

Рис. 5.8. Реакция системы на возмущающее воздействие (2 канала).
Модернизация системы привела к устранению установившейся ошибки и привела минимизации ее амплитуды.