

7.3. Приведение моментов инерции звеньев и определение момента инерции маховика
Из-за непостоянства моментов сил сопротивлений в механизмах КИА отсутствует равенство между мгновенными значениями моментов сил движущих и сил сопротивлений, что вызывает неравномерность движения звеньев механизмов. С целью уменьшения неравномерности движения необходимо увеличить момент инерции вращающихся масс, что достигается путем установки маховика.
Приведенный к кривошипному валу 4 момент инерции равен
![]() ,
,
где
![]() – приведенный к кривошипному валу
момент инерции звеньев механизма,
– приведенный к кривошипному валу
момент инерции звеньев механизма,
![]() – момент инерции маховика, установленного
на звене приведения.
– момент инерции маховика, установленного
на звене приведения.
– определяется по формуле, ,
![]() , (19)
, (19)
где
![]() –
моменты инерции вращающихся масс (за
исключением маховика) соответственно
на валах 3,4;
– момент инерции ротора электродвигателя;
– момент инерции на выходном валу
планетарной передачи;
–
моменты инерции вращающихся масс (за
исключением маховика) соответственно
на валах 3,4;
– момент инерции ротора электродвигателя;
– момент инерции на выходном валу
планетарной передачи;
![]() – средний, приведенный к валу 4, момент
инерции стола и креста. Так как
инерционность стола и креста проявляется
при повороте звена 5, для упрощения
расчетов следует принять
– средний, приведенный к валу 4, момент
инерции стола и креста. Так как
инерционность стола и креста проявляется
при повороте звена 5, для упрощения
расчетов следует принять
![]() .
.
При заданном коэффициенте неравномерности вращения момент инерции маховика определяется по приближенной формуле, ,
![]() ,
(20)
,
(20)
где
![]() – избыточная работа сил сопротивлений
и сил инерции креста и стола. Она
определяется как разность между работой
сил сопротивления, сил инерций и средней
работой движущих сил на интервале
– избыточная работа сил сопротивлений
и сил инерции креста и стола. Она
определяется как разность между работой
сил сопротивления, сил инерций и средней
работой движущих сил на интервале
![]() (см. рис.9). Величина избыточной работы
может быть определена из графика
приведенных моментов, Дж.
(см. рис.9). Величина избыточной работы
может быть определена из графика
приведенных моментов, Дж.
![]() ,
,
где
![]() – масштабный коэффициент по оси моментов,
– масштабный коэффициент по оси моментов,
![]() ;
;
![]() – масштабный коэффициент по оси углов
поворота, рад/мм;
– масштабный коэффициент по оси углов
поворота, рад/мм;
![]() – площадь на графике, заключенная между
кривой
– площадь на графике, заключенная между
кривой
![]() и прямой
и прямой
![]() (см. заштрихованную площадь на рис.9),
(см. заштрихованную площадь на рис.9),
![]() .
.
Определение приведенного момента инерции звеньев и расчет момента инерции маховика приведены в [1], с.150. . .153, 167. . .173; [3], с.65. . .79; [4], с.238. . .241, 336. . .340, 382. . .386.
Определение сил, действующих в зацеплении колес и реакций в опорах вала
К
кривошипному валу 4 через зубчатую
коническую пару (см. рис.5) подводится
крутящий момент. При этом на цевку
кривошипа при повороте креста мальтийского
механизма действует сила сопротивления
![]() ;
при прямом ходе к
ползуну приложена сила
(считаем
;
при прямом ходе к
ползуну приложена сила
(считаем
![]() ).
В зацеплении
конической зубчатой пары действуют:
осевая
).
В зацеплении
конической зубчатой пары действуют:
осевая
![]() ,
радиальная
,
радиальная
![]() и окружная
и окружная
![]() силы.
В работающей реальной конструкции КИА
взаимное расположение направлений сил
,
,
,
и
изменяется.
силы.
В работающей реальной конструкции КИА
взаимное расположение направлений сил
,
,
,
и
изменяется.
Рассмотрим
случай, когда сила
действует
перпендикулярно кривошипу вала 4 (когда
ось кривошипа с цевкой совмещена с
линией, соединяющей оси валов 4 и 5). Пусть
![]() ,
а
отсутствует (ползун совершает обратный
ход).
,
а
отсутствует (ползун совершает обратный
ход).
Для
этого случая примем одну из возможных
схем расположения сил, показанную на
рис.10. Здесь же показаны составляющие
реакций
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() в опорах вала,
в опорах вала,
![]() – длина кривошипа мальтийского механизма,
– длина кривошипа мальтийского механизма,
![]() – размеры участков вала 4,
– диаметр делительной окружности
ведомого конического колеса.
– размеры участков вала 4,
– диаметр делительной окружности
ведомого конического колеса.
Расчет сил и реакций в опорах рекомендуется выполнять в следующей последовательности:
1. Определить крутящий момент на валу 4 по формуле, ,
![]() ,
,
где – КПД зубчатой конической пары и планетарной передачи.
2. Вычислить силы , , по формулам, Н,
![]() ,
,
![]() ,
,
![]() ,
,
где
![]() – угол зацепления (
– угол зацепления (![]() ),
),![]() – угол при вершине делительного конуса
конического колеса (
– угол при вершине делительного конуса
конического колеса (![]() ).
).
3. Составить расчетную схему вала 4.
При этом (см. рис.10) расчетная схема вала представляется балкой на шарнирных опорах, к которой приложены указанные силы и реакции в опорах.
При составлении схемы вала считать правую опору шарнирно-неподвижной, а левую – шарнирно-подвижной.
4.
Так как линии действия сил
![]() ,
,
не пересекают ось
вала, эти силы рекомендуется привести
к оси.
,
,
не пересекают ось
вала, эти силы рекомендуется привести
к оси.
5. При определении реакций в опорах рекомендуется изобразить схемы действия сил в плоскостях XY и XZ. Затем составить уравнения равновесия сил и моментов сил в каждой плоскости. Сила считается неизвестной.
6. На основании уравнений равновесия определить силу , составляющие опорных реакций в плоскостях XY и XZ и cуммарные реакции в вертикальной плоскости.
Р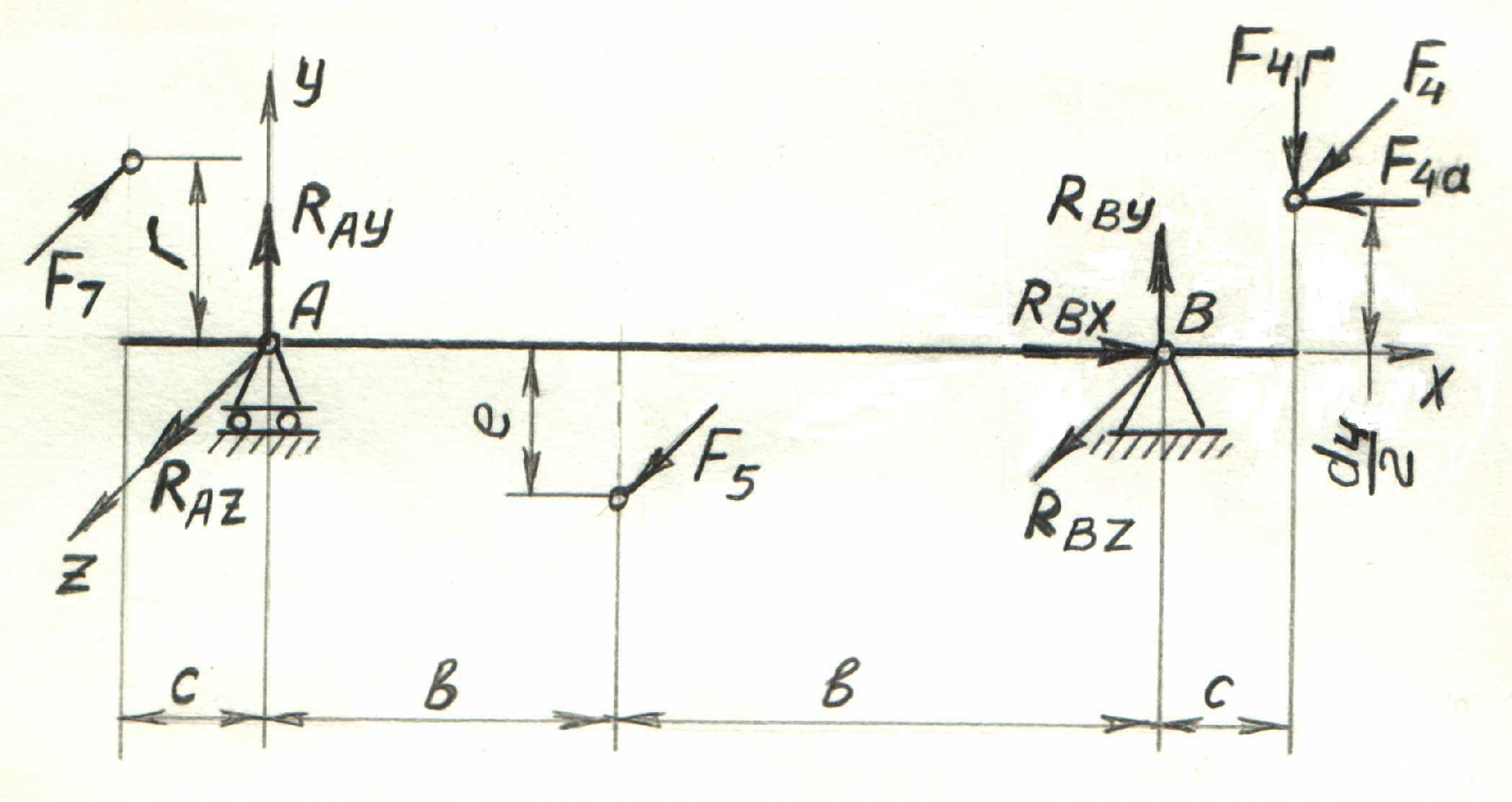 ис.10
ис.10
Расчет сил в зацеплении конических колес, примеры определения реакций в опорах и построения эпюр приведены в [2], с.101. . .107, 124. . 135; [3], с.213. . .218.