

6.1. Кинематический анализ мальтийского механизма
Перед разработкой конструкции мальтийского механизма следует определить основные параметры и выполнить его кинематический анализ. Исходными данными являются параметры , , . Необходимо определить:
угол поворота креста за один оборот кривошипного вала,
угол рабочего поворота кривошипа,
геометрические размеры мальтийского механизма,
угловую скорость и угловое ускорение креста.
6.1.1. Определение основных параметров
Угол
поворота
![]() креста за один оборот кривошипного вала
вычисляется по формуле (см. рис.6), град,
креста за один оборот кривошипного вала
вычисляется по формуле (см. рис.6), град,
![]() .
.
Угол
рабочего поворота
![]() кривошипа, при котором происходит
поворот креста, равен, град,
кривошипа, при котором происходит
поворот креста, равен, град,
![]() .
.
Угол выемки фиксирующего диска, град.,
![]() .
.
Длина кривошипа, мм,
![]() .
.
Расстояние от оси вращения креста до начала паза, мм,
![]() .
.
Диаметр цевки кривошипа, мм,
![]() .
.
Диаметр креста, мм,
 ,
,
где С – фаска, равная 1,5. . .2 мм.
Длина паза креста, мм,
![]() .
.
Диаметры валов кривошипа и креста принимают конструктивно, соблюдая условия, мм,
![]() ,
,
![]() .
.
При
разработке конструкции в дальнейшем
![]() и
и
![]() проверяют расчетами на прочность.
проверяют расчетами на прочность.
Отношение
длины
![]() кривошипа к межосевому расстоянию равно
кривошипа к межосевому расстоянию равно
![]() .
.
Диаметр скользящей поверхности диска кривошипа, мм,
![]() .
.
6.1.2. Определение угловой скорости и углового ускорения креста
Угловая скорость креста мальтийского механизма зависит от угла рабочего поворота кривошипного вала и определяется по формуле, 1/c,
 .
(1)
.
(1)
Угловое
ускорение определяется по формуле,
1/с![]() ,
,
 .
(2)
.
(2)
Расчеты
по формулам (1) и (2) необходимо выполнить
при значении
,
изменяющемся через
![]() от
от
![]() ,
,
соответствующем входу цевки кривошипа в паз креста, до
![]() ,
,
соответствующем выходу цевки из паза.
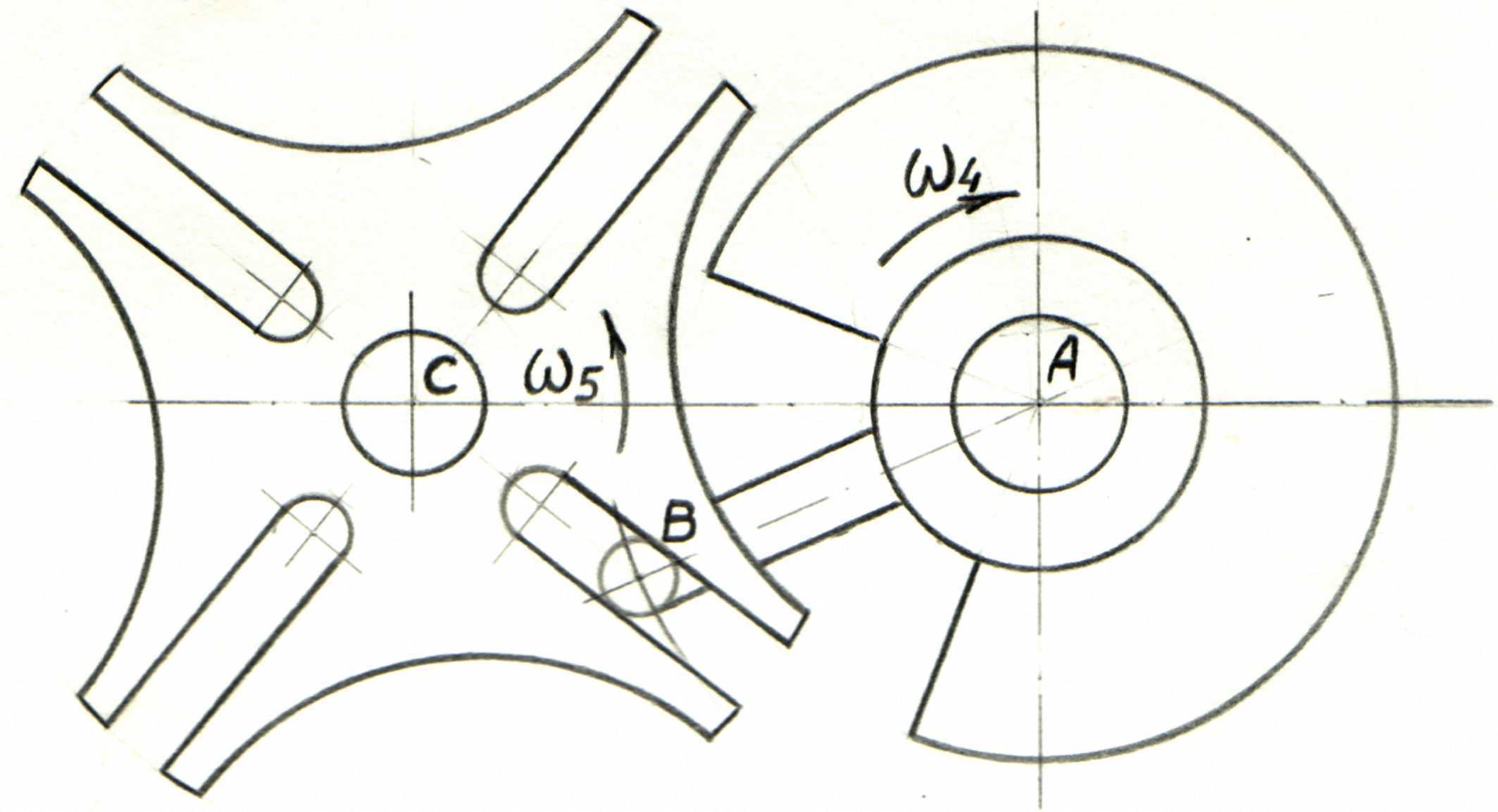
Нулевое значение угла соответствует положению кривошипа, когда он совмещается с линией, соединяющей оси валов 4 и 5 (см. рис.5).
Результаты
расчетов рекомендуется свести в таблицы.
По этим данным построить диаграммы
![]() и
и
![]() .
.
Указания по расчету основных параметров мальтийского механизма, определению угловой скорости и ускорения креста приведены в [1], с.438. . .442; [3], с.293. . .297; [4], с.172. . .174.
6.1.3. Построение планов скоростей и ускорений звеньев
мальтийского механизма
Перед построением планов скоростей и ускорений необходимо изобразить мальтийский механизм в выбранном масштабе.
Построение следует выполнить для трех положений мальтийского механизма:
а) для момента входа цевки кривошипа в паз креста, т.е. при ;
б)
для момента поворота кривошипа на ¼
рабочего угла, т.е. при
![]() ;
;
в) для момента поворота кривошипа на ½ рабочего угла, т.е. когда ось кривошипа совмещается с линией, соединяющей оси валов 4 и 5.
При построении планов скоростей и ускорений считаются заданными угловая скорость , угол рабочего поворота вала кривошипа , число пазов креста , межосевое расстояние и длина кривошипа .
Используя результаты построения планов необходимо определить угловые скорости и угловые ускорения вала креста для указанных выше трех положений.
В качестве примера рассмотрим построения планов скоростей и ускорений для положения кривошипа, изображенного на рис.7,а.
Будем рассматривать точку В как точку, принадлежащую одновременно кривошипу и кресту. Движение точки В, принадлежащей кривошипу, считаем абсолютным. Точка В, принадлежащая кресту находится в сложном движении – в переносном вращательном с крестом и относительном прямолинейном вдоль паза креста.
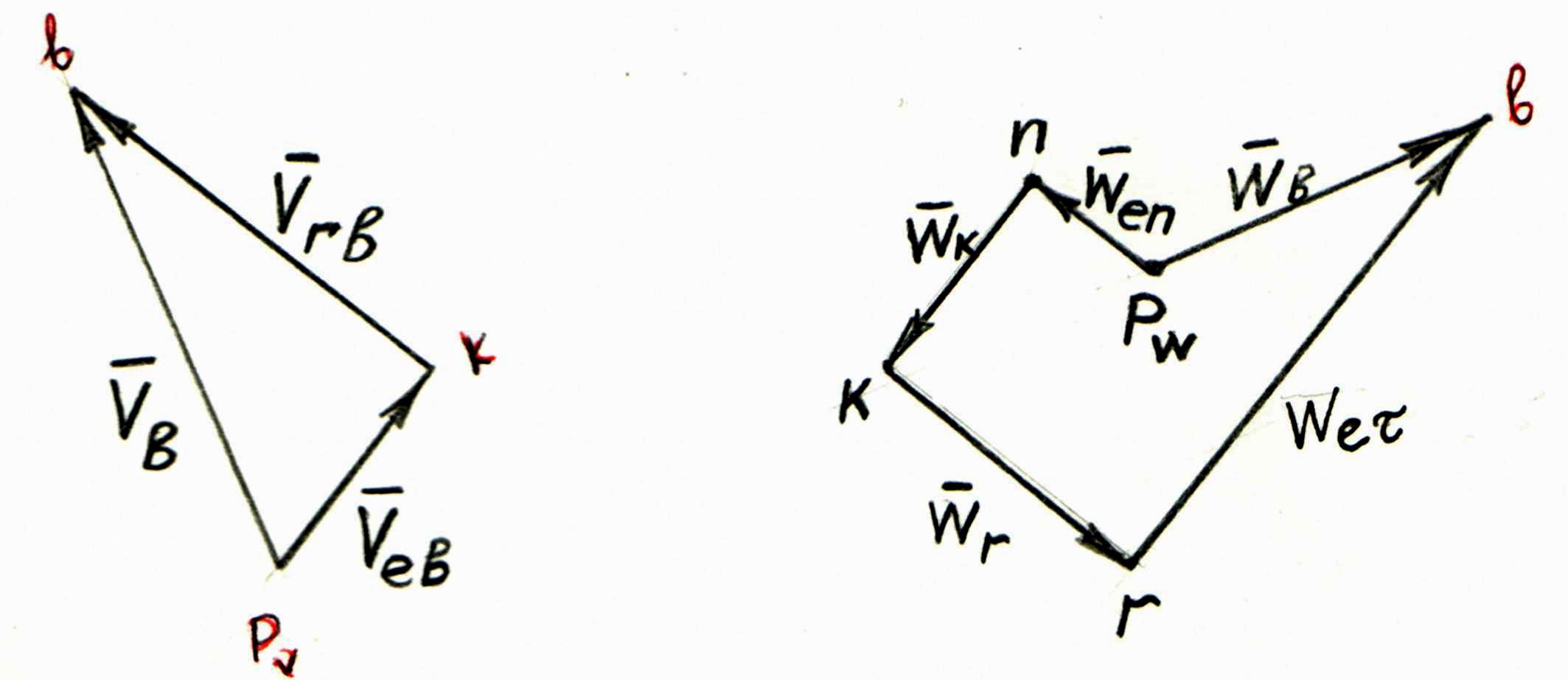
Построение планов скоростей ведем по следующему векторному уравнению:
![]() ,
,
где
![]() – вектор абсолютной скорости точки В,
равный по модулю
– вектор абсолютной скорости точки В,
равный по модулю
![]() и направленный перпендикулярно АВ;
и направленный перпендикулярно АВ;
![]() –
вектор переносной скорости точки В,
равный по модулю
–
вектор переносной скорости точки В,
равный по модулю
![]() и направленный перпендикулярно ВС;
и направленный перпендикулярно ВС;
![]() –
вектор относительной скорости точки
В,
направленный параллельно ВС.
–
вектор относительной скорости точки
В,
направленный параллельно ВС.
Выполним
построение плана скоростей при положении
кривошипа, когда он повернулся на ¼
рабочего угла. От полюса
![]() (рис.7,б)
отклады-
(рис.7,б)
отклады-
а)
б) в)
Рис.7
ваем
от резок
![]() ,
изображающий в определенном масштабе
вектор скорости
.
При этом
,
изображающий в определенном масштабе
вектор скорости
.
При этом
![]() ,
причем если
,
причем если
![]() изменяется в м/c,
то масштабный коэффициент
изменяется в м/c,
то масштабный коэффициент
![]() – в
– в
![]() .
(
показывает, сколько единиц скорости
приходится на 1 мм отрезка
.
(
показывает, сколько единиц скорости
приходится на 1 мм отрезка
![]() ).
Затем из точки
проведем прямую перпендикулярно ВС,
а через точку b
– прямую
параллельно ВС.
Точка их пересечения k
является концом вектора
и началом вектора
.
Определим модуль вектора
из плана с учетом масштабного коэффициента
,
т.е.
).
Затем из точки
проведем прямую перпендикулярно ВС,
а через точку b
– прямую
параллельно ВС.
Точка их пересечения k
является концом вектора
и началом вектора
.
Определим модуль вектора
из плана с учетом масштабного коэффициента
,
т.е.
![]() (м/c).
Так как скорость
зависит от угловой скорости
(м/c).
Так как скорость
зависит от угловой скорости
![]() креста, то величина угловой скорости
креста, то величина угловой скорости
![]()
![]() (1/c).
Здесь
(1/c).
Здесь
![]() – расстояние от точки В
до центра вращения креста в м.
– расстояние от точки В
до центра вращения креста в м.
При
построении плана скоростей для первого
положения мальтийского механизма
следует иметь в виду, что
![]() ,
а для третьего положения –
,
а для третьего положения –
![]() .
.
Строим план ускорений мальтийского механизма. При рассмотрении ускорения точки В, принадлежащей кресту, следует учесть, что при переносном вращательном движении и относительном перемещении вдоль паза возникает также ускорение Кориолиса. Поэтому построение плана ускорений ведем по следующему уравнению
![]() ,
,
где
![]() – вектор абсолютного ускорения, равный
нормальному ускорению точки В
(при
– вектор абсолютного ускорения, равный
нормальному ускорению точки В
(при
![]() ),
принадлежащей кривошипу, равный по
модулю
),
принадлежащей кривошипу, равный по
модулю
![]() и направленный по АВ
от точки В
к точке А;
и направленный по АВ
от точки В
к точке А;
![]() – вектор нормального ускорения в
переносном вращательном движении точки
В,
принадлежащей кресту, равный по модулю
– вектор нормального ускорения в
переносном вращательном движении точки
В,
принадлежащей кресту, равный по модулю
![]() и направленный от точки В
к точке С;
и направленный от точки В
к точке С;
![]() – вектор касательного ускорения в
переносном движении, направленный
перпендикулярно СВ;
– вектор касательного ускорения в
переносном движении, направленный
перпендикулярно СВ;
![]() – вектор относительного ускорения
точки В,
направленный вдоль паза креста по СВ;
– вектор относительного ускорения
точки В,
направленный вдоль паза креста по СВ;
![]() – вектор ускорения Кориолиса, равный
по модулю
– вектор ускорения Кориолиса, равный
по модулю
![]()
![]() и имеющий направление вектора
,
повернутого на
и имеющий направление вектора
,
повернутого на
![]() в направлении угловой скорости
(см. рис.7, а,в).
в направлении угловой скорости
(см. рис.7, а,в).
Выполним
построение плана ускорений по векторному
уравнению, в котором известны векторы
![]() по направлениям и модулям. Для векторов
по направлениям и модулям. Для векторов
![]() известны лишь линии их действия.
известны лишь линии их действия.
От
полюса
![]() откладываем отрезок
откладываем отрезок
![]() ,
который изображает на плане в определенном
масштабе вектор
.
Масштабный коэффициент ускорений
,
который изображает на плане в определенном
масштабе вектор
.
Масштабный коэффициент ускорений
![]()
![]() .
.
![]() показывает, сколько единиц ускорения
в
показывает, сколько единиц ускорения
в
![]() приходится на 1мм отрезка
.
Далее из полюса
строим отрезок
приходится на 1мм отрезка
.
Далее из полюса
строим отрезок
![]() ,
изображающий вектор
в том же масштабе, и через точку п
проводим отрезок пк
перпендикулярно
,
который изображает вектор ускорения
Кориолиса
.
Так как известны линии действия векторов
,
то через точку к
проводим прямую, параллельную СВ,
а через точку b
– прямую, перпендикулярную СВ.
Точка их пересечения r
дает конец вектора
и начало вектора
.
,
изображающий вектор
в том же масштабе, и через точку п
проводим отрезок пк
перпендикулярно
,
который изображает вектор ускорения
Кориолиса
.
Так как известны линии действия векторов
,
то через точку к
проводим прямую, параллельную СВ,
а через точку b
– прямую, перпендикулярную СВ.
Точка их пересечения r
дает конец вектора
и начало вектора
.
Определим
модуль вектора
из плана с учетом масштабного коэффициента,
т.е.
![]() (
).
Затем вычислим угловое ускорение
(
).
Затем вычислим угловое ускорение
![]() (
(![]() ).
).
При
построении плана ускорений для первого
положения мальтийского механизма
обратим внимание на то, что
![]() ,
,
![]() ,
,
![]() и что для третьего положения
и что для третьего положения
![]() ,
,
.
,
,
.
Методика построения планов скоростей и ускорений звеньев механизмов приведена в [1], с.70. . .72, 75. . .80; [3], с.33. . .38; [4], с.79. . .96.