

Динамический анализ
При динамическом анализе на основании предыдущих расчетов и исходных данных ставится задача определения мощности движущих сил, выбора электродвигателя и определения момента инерции маховика.
Определение приведенного момента сил
Суммарный момент, приведенный к кривошипному валу 4, включает
приведенный момент сил сопротивлений и приведенный момент сил инерции масс, вращающихся с ускорениями
![]() .
(13)
.
(13)
При определении приведенного момента сил сопротивлений учитываются момент сил сопротивления транспортирующего устройства; моменты сил трения в опорах валов 4, 5; силы сопротивления при выталкивании деталей в лоток.
Таким образом, приведенный к валу 4 момент сил сопротивления равен
![]() ,
(14)
,
(14)
где
![]() – приведенный момент силы сопротивления
транспортирующего устройства,
;
– приведенный момент силы сопротивления
транспортирующего устройства,
;
![]() .
.
![]() –
момент
сил трения в опорах вала 4,
.
–
момент
сил трения в опорах вала 4,
.
![]() – приведенный
момент сил трения в опорах вала 5. Этот
момент возникает при вращении креста
со столом и изменяется в зависимости
от угла рабочего поворота кривошипного
вала,
,
– приведенный
момент сил трения в опорах вала 5. Этот
момент возникает при вращении креста
со столом и изменяется в зависимости
от угла рабочего поворота кривошипного
вала,
,
![]() . (15)
. (15)
![]() – приведенный момент
сил сопротивления, возникающий при
выталкивании детали ползуном при прямом
ходе,
,
– приведенный момент
сил сопротивления, возникающий при
выталкивании детали ползуном при прямом
ходе,
,
![]()
![]() .
(16)
.
(16)
Для упрощения расчетов считать, что сила передается на шейку кривошипа и постоянна по величине.
![]() – приведенный
момент сил инерции
креста и стола, вращающегося с ускорениями.
Этот момент зависит от угла рабочего
поворота кривошипного вала и определяется
по формуле,
,
– приведенный
момент сил инерции
креста и стола, вращающегося с ускорениями.
Этот момент зависит от угла рабочего
поворота кривошипного вала и определяется
по формуле,
,
![]() . (17)
. (17)
Расчеты
по формулам (13), (14) рекомендуется выполнять
при
,
изменяющемся через
от 0 до
![]() ,
а по формуле (16) – от нуля до
.
Нулевое значение угла
соответствует положению цевки кривошипа
в момент вхождения в паз креста.
,
а по формуле (16) – от нуля до
.
Нулевое значение угла
соответствует положению цевки кривошипа
в момент вхождения в паз креста.
При
расчетах
![]() ,
,
![]() ,
по формулам (14),
(15), (17) и
,
по формулам (14),
(15), (17) и
![]() по формуле (16)
необходимо учесть следующее: нулевое
значение
и
(при входе цевки в
паз креста, что соответствует
по формуле (16)
необходимо учесть следующее: нулевое
значение
и
(при входе цевки в
паз креста, что соответствует
![]() )
должно соответствовать значению угла
)
должно соответствовать значению угла
![]() .
Нулевое значение
совместить со
значением
,
отстоящим на
.
Нулевое значение
совместить со
значением
,
отстоящим на
![]() после точки, соответствующей началу
состояния покоя креста. Поворот на
соответствует времени
(см. циклограмму, табл.3).
после точки, соответствующей началу
состояния покоя креста. Поворот на
соответствует времени
(см. циклограмму, табл.3).
Результаты вычислений по формулам (13), (14), (15), (16), (17) следует представить в виде сводной таблицы.
П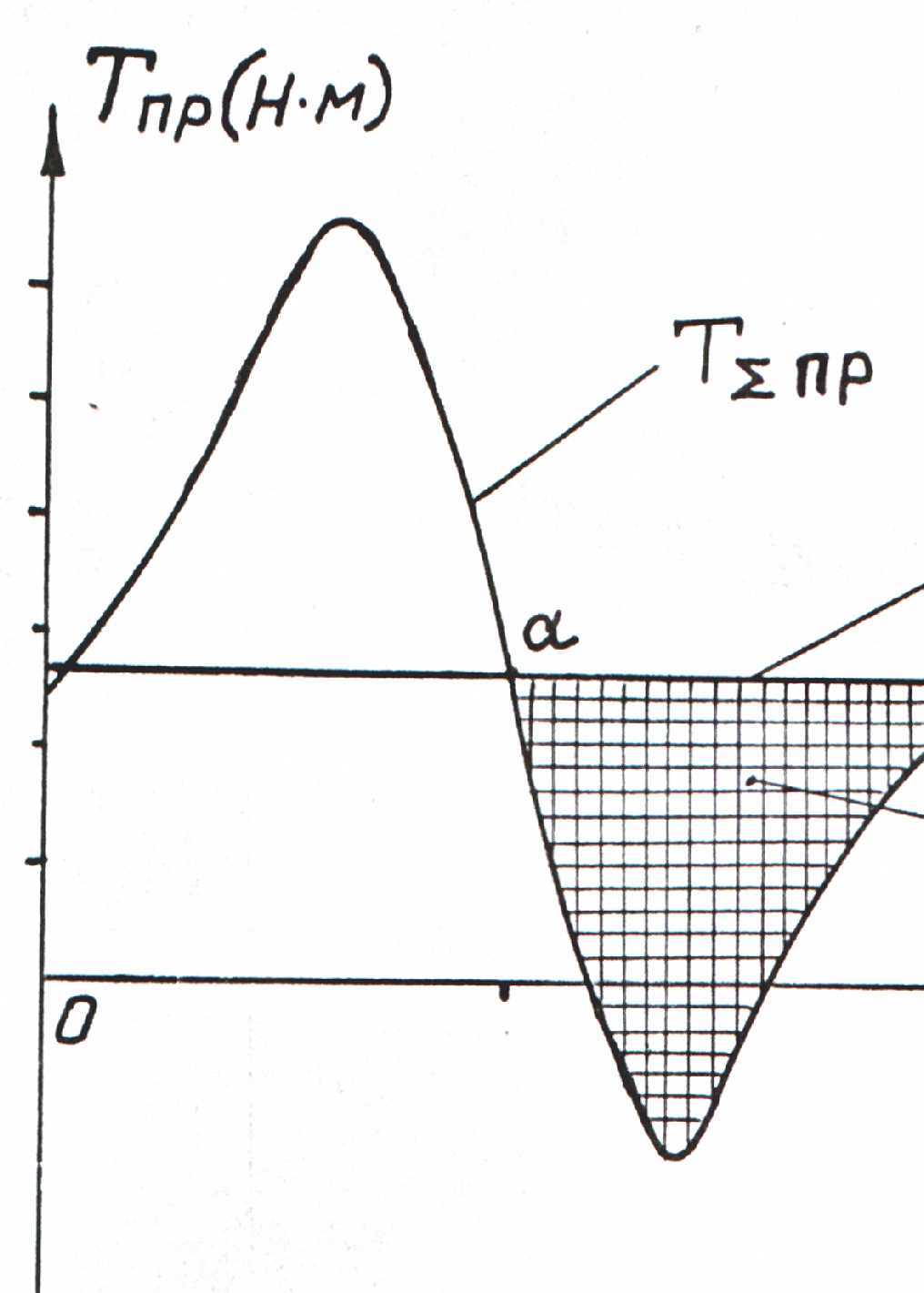
 о
данным вычислений на одном графике (см.
рис.9) в пределах изменения угла
о
данным вычислений на одном графике (см.
рис.9) в пределах изменения угла
Рис.9
от
0 до
необходимо построить суммарную диаграмму
![]() и прямую, определяющую
среднее значение приведенного момента
сил сопротивления за цикл движения
и прямую, определяющую
среднее значение приведенного момента
сил сопротивления за цикл движения
![]() .
.
Исследование движения машинного агрегата, определение его приведенного момента изложено в [1], с. 140. . .150, 153. . .156; [4], с. 201. . .212, 324. . .336, 349. . .356.
7.2. Определение мощности движущих сил и выбор электродвигателя
При
определении мощности сил
![]() следует исходить из того, что за цикл
работа движущих сил равна работе сил
сопротивлений, в том числе с учетом сил
сопротивлений в зубчатых передачах
следует исходить из того, что за цикл
работа движущих сил равна работе сил
сопротивлений, в том числе с учетом сил
сопротивлений в зубчатых передачах
![]() .
.
Здесь
![]() – мощность сил сопротивлений, кВт,
– мощность сил сопротивлений, кВт,
![]() .
.
![]() – КПД зубчатых
передач. Так как коническая зубчатая
пара и планетарная передача соединены
последовательно, то
– КПД зубчатых
передач. Так как коническая зубчатая
пара и планетарная передача соединены
последовательно, то
![]() .
(18)
.
(18)
Здесь
![]() –
КПД конической зубчатой пары (следует
принять
–
КПД конической зубчатой пары (следует
принять
![]() );
);
![]() –
КПД планетарной передачи.
–
КПД планетарной передачи.
Потери
мощности в планетарных передачах при
условии неподвижности одного из
центральных колес зависят от вида схемы
и коэффициента потерь
![]() простой передачи, полученной из
планетарной остановкой водила.
простой передачи, полученной из
планетарной остановкой водила.
В зависимости от схемы следует вычислить по одной из формул, приведенных в табл.4.
Т а б л и ц а 4
РАСЧЕТНЫЕ ФОРМУЛЫ
Схема на рисунке |
Формулы |
1 |
|
2 |
|
3 |
|
4 |
|
При
вычислениях КПД по формулам в табл.4,
рекомендуется для схем, представленных
на рис.1 и 3, принять
![]() ;
а на рис. 2 и 4 –
;
а на рис. 2 и 4 –
![]() .
.
Минимальное значение мощности электродвигателя равно
![]() .
(19)
.
(19)
По
мощности
![]() и заданной угловой скорости
следует подобрать электродвигатель
(см. табл.5). Из этой таблицы следует
выбрать момент инерции ротора
и заданной угловой скорости
следует подобрать электродвигатель
(см. табл.5). Из этой таблицы следует
выбрать момент инерции ротора
![]() и частоту вращения вала
и частоту вращения вала
![]() ,
используемых при последующих расчетах.
,
используемых при последующих расчетах.
Определение мощности движущих сил в механизмах, расчет КПД планетарных передач приведены в [1], с.164. . .167; [3], с.254. . .256; [4], с.308. . .313, 319. . .324.
Т а б л и ц а 5
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ АСИНХРОННЫХ
ДВИГАТЕЛЕЙ
Тип электродвигателя |
Номинальная мощность кВт |
Частота вращения об/мин |
Момент инерции ротора
|
АОЛ2 – 11 – 2 АОЛ2 – 12 – 2 АОЛ2 – 21 – 2 АОЛ2 – 22 – 2 АОЛ2 – 31 – 2 АОЛ2 – 12 – 4 АОЛ2 – 21 – 4 АОЛ2 – 22 – 4 АОЛ2 – 31 – 4 АОЛ2 – 32 – 4 |
0,8 1,1 1,5 2,3 3,0 0,8 1,1 1,5 2,2 3,0 |
2815 2815 2860 2860 2880 1460 1400 1400 1430 1430 |
0,00012 0,00015 0,00022 0,00035 0,00080 0,00021 0,00042 0,00055 0,001 0,0012 |