

6.2.3. Построение плана скоростей планетарной передачи
Построение плана скоростей выполняется при заданной угловой скорости ведущего звена и известных геометрических размерах планетарной передачи. По планам скоростей определяются угловые скорости ведомого звена и сателлита.
Перед построением планов скоростей следует изобразить кинематическую схему планетарной передачи в выбранном масштабе.
Допускается строить план скоростей с изображением одного сателлита и центральных колес.
На рис.8 изображена схема планетарной передачи с ведущим центральным колесом а.
Сначала
строим план линейных скоростей колес
и водила. Для этого на вертикальную
линию, изображенную справа от схемы,
переносятся характерные точки О,
Р,
![]() ,
Q.
Точки Р
и Q
совпадают с полюсами з
,
Q.
Точки Р
и Q
совпадают с полюсами з ацепл
ацепл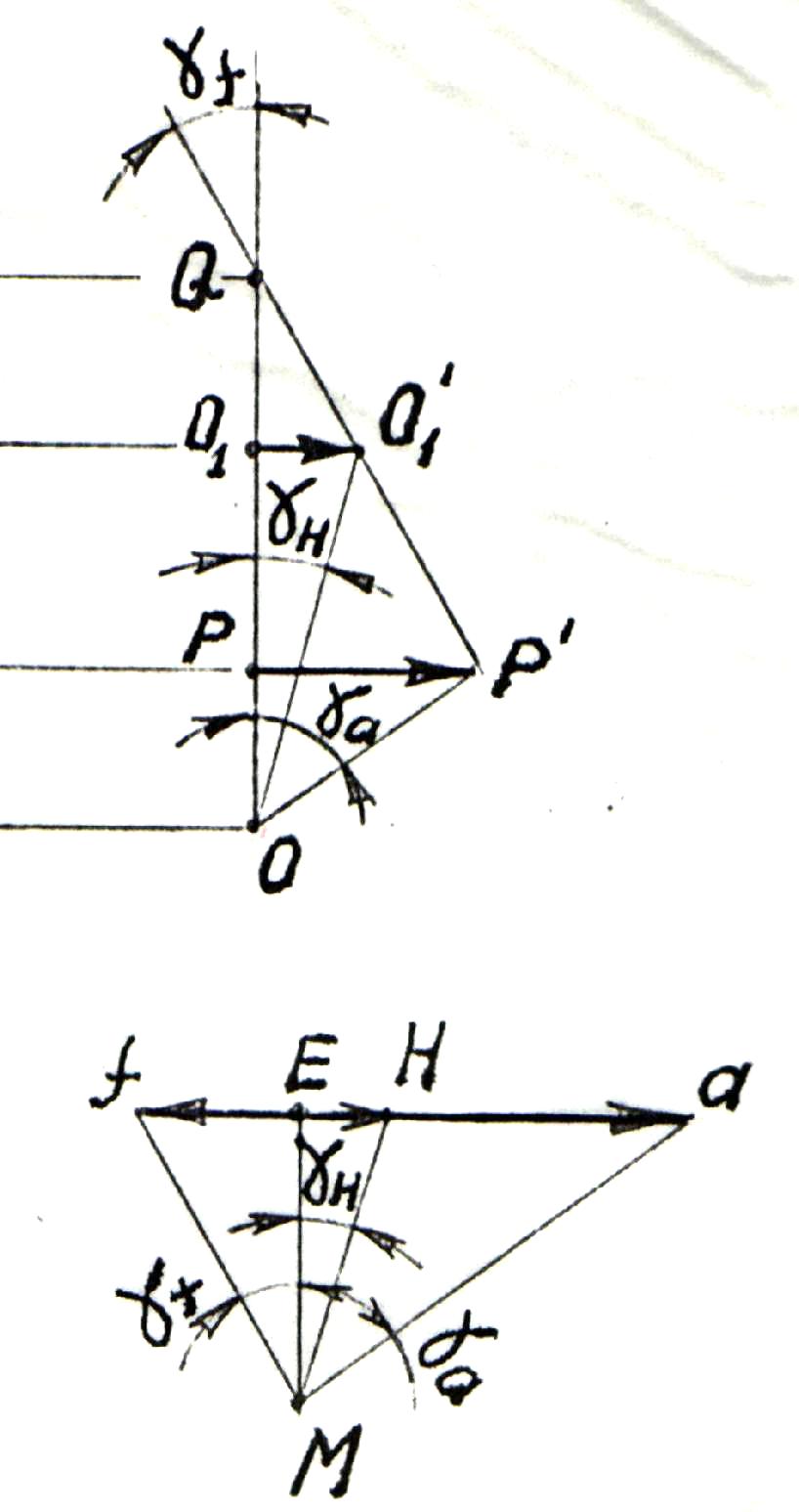 ения.
Точка
совмещена с осью сателлита.
ения.
Точка
совмещена с осью сателлита.
Рис.8
Отложим
отрезок
![]() длиной
длиной
![]() ,
где
,
где
![]() ;
;
![]() – масштабный коэффициент,
– масштабный коэффициент,
![]() ;
;
![]() – диаметр делительной окружности
центрального колеса. Соединив точки
– диаметр делительной окружности
центрального колеса. Соединив точки
![]() и О
отрезком под углом
и О
отрезком под углом
![]() ,
получим прямую
,
получим прямую
![]() распределения линейных скоростей
колеса а.
Точка
распределения линейных скоростей
колеса а.
Точка
![]() является мгновенным центром вращения
колес b
и f
в абсолютном движении. Соединив точки
Q
и
отрезком под углом
является мгновенным центром вращения
колес b
и f
в абсолютном движении. Соединив точки
Q
и
отрезком под углом
![]() ,
получим прямую распределения линейных
скоростей колес f
и q.
На этой прямой лежит точка
,
получим прямую распределения линейных
скоростей колес f
и q.
На этой прямой лежит точка
![]() – конец вектора
– конец вектора
![]() соответствующего линейной скорости
точки
.
Соединив точки О
и
отрезком под углом
соответствующего линейной скорости
точки
.
Соединив точки О
и
отрезком под углом
![]() ,
получим прямую распределения линейных
скоростей водила Н.
,
получим прямую распределения линейных
скоростей водила Н.
Далее
строим план угловых скоростей звеньев
планетарной передачи. Под планом линейных
скоростей проводим прямую, перпендикулярную
прямой OQ.
Из принятой за начало отсчета точки Е
восстанавливаем перпендикуляр и
откладываем на нем отрезок ЕМ
произвольной длины. Через точку М
проводим прямые под углами
,
![]() ,
.
Точки пересечения этих прямых с прямой,
перпендикулярной OQ,
обозначим соответственно а,
Н,
f.
Отрезки Еа,
ЕН,
Еf
в некотором масштабе изображают векторы
угловых скоростей
,
.
Точки пересечения этих прямых с прямой,
перпендикулярной OQ,
обозначим соответственно а,
Н,
f.
Отрезки Еа,
ЕН,
Еf
в некотором масштабе изображают векторы
угловых скоростей
![]() ,
,
![]() ,
,
![]() .
Масштабный коэффициент
.
Масштабный коэффициент
![]()
![]() .
Угловые скорости водила и сателлита
будут равны соответственно
.
Угловые скорости водила и сателлита
будут равны соответственно
![]() ,
,
![]() .
Из плана скоростей видно, что векторы
угловых скоростей
и
имеют одинаковые направления, а вектор
угловой скорости
сателлита – противоположное им.
.
Из плана скоростей видно, что векторы
угловых скоростей
и
имеют одинаковые направления, а вектор
угловой скорости
сателлита – противоположное им.
План
скоростей планетарной двухступенчатой
передачи (рис.4) следует строить только
для первой ступени. При этом необходимо
определить угловые скорости сателлита
![]() и водила
и водила
![]() .
.
Примеры построения планов скоростей планетарных передач приведены в [1], с. 72. . .75, с.410. . .413; [3], с.246. . .247.
6.3. Кинематический анализ кривошипно-ползунного механизма
По
исходным данным
![]() и
следует определить ход ползуна
и
следует определить ход ползуна
![]() и длину шатуна
и длину шатуна
![]() .
.
Кинематический
анализ сводится к определению скорости
движения ползуна
![]()
![]() и построению кривой скорости в зависимости
от угла
и построению кривой скорости в зависимости
от угла
![]() при известной угловой скорости
кривошипного вала 4.
при известной угловой скорости
кривошипного вала 4.
Скорость перемещения ползуна следует определить по приближенной формуле, м/c,
![]() .
(12)
.
(12)
При
расчетах по формуле (12) значения угла
рекомендуется принимать через
от 0 до
![]() (при прямом ходе ползуна). Прямой ход
происходит за время
(при прямом ходе ползуна). Прямой ход
происходит за время
![]() (см. циклограмму в табл.3). Расчеты
рекомендуется свести в таблицу. По
результатам расчетов необходимо
построить диаграмму скорости
при прямом ходе ползуна.
(см. циклограмму в табл.3). Расчеты
рекомендуется свести в таблицу. По
результатам расчетов необходимо
построить диаграмму скорости
при прямом ходе ползуна.
Примеры определения кинематических характеристик кривошипно-ползунного механизма приведены в [1], с. 92 . . .98; [4], с. 103. . .107.