

2.1. Плоская система сил
2.1.1. Силы, сходящиеся в одной точке
Уравнения равновесия твердого тела, находящегося под действием сил, сходящихся в одной точке
![]() .
(57)
.
(57)
В (57) входят как силы активные, так и реакции связей, наложенных на тело. Если на тело действуют сходящиеся силы, лежащие в одной плоскости, то уравнений равновесия будет два. При решении некоторых задач можно использовать теорему о трех силах: Если твердое тело находится в равновесии под действием трех сил и линии действия двух из этих сил пересекаются, то линия действия третьей силы проходит через эту точку пересечения и все три силы лежат в одной плоскости.
Если на покоящееся тело наложены связи с трением, то к уравнениям равновесия с учетом сил трения следует присоединить дополнительное условие
Fтр = fN, (58)
где f - коэффициент трения скольжения при покое; N - модуль нормальной реакции.
Задачи на равновесие твердого тела под действием системы сходящихся сил можно решать геометрическим и аналитическим методами.
Первым методом удобно пользоваться лишь для плоской системы сил и особенно в тех случаях, когда общее число сил, действующих на тело, равно трем. При равновесии тела треугольник, построенный на этих силах, должен быть замкнутым.
Аналитическим методом можно пользоваться также и для пространственной системы сил при любом числе сил. При этом следует иметь в виду, что общее число неизвестных в задаче должно быть не больше трех для пространственной системы сходящихся сил и не больше двух для плоской системы сходящихся сил.
Пример 1. Груз M весом Р (рис. 178,а) подвешен на гибком нерастяжимом тросе ОМ1, отклоненном от вертикали на угол α, и удерживается в равновесии с помощью другого гибкого нерастяжимого троса М1АМ2 охватывающего идеальный блок А и несущего на свободном конце груз М2. Считая, что при равновесии участок троса М1А горизонтален, определить вес Q груза M2 и натяжение троса ОМ1. Размерами груза М1 и весом тросов пренебречь.
Решение.
Рассмотрим равновесие груза M1.
Активными силами являются
вертикально направленная сила
![]() и
горизонтально направленная
сила
и
горизонтально направленная
сила
![]() ,
равная весу груза
Q,
так как идеальный блок A
изменяет только направление силы.
,
равная весу груза
Q,
так как идеальный блок A
изменяет только направление силы.
На
груз М1
наложена связь, осуществляемая тросом
OM1.
Освободим его от связи. Реакция связи
направлена по тросу вверх. Таким образом,
груз M1
находится в равновесии под действием
плоской сходящейся системы трех сил:
,
и
![]() причем
T2 = Q
(рис. 178,б).
причем
T2 = Q
(рис. 178,б).
Решим эту задачу двумя способами: геометрическим и аналитическим.
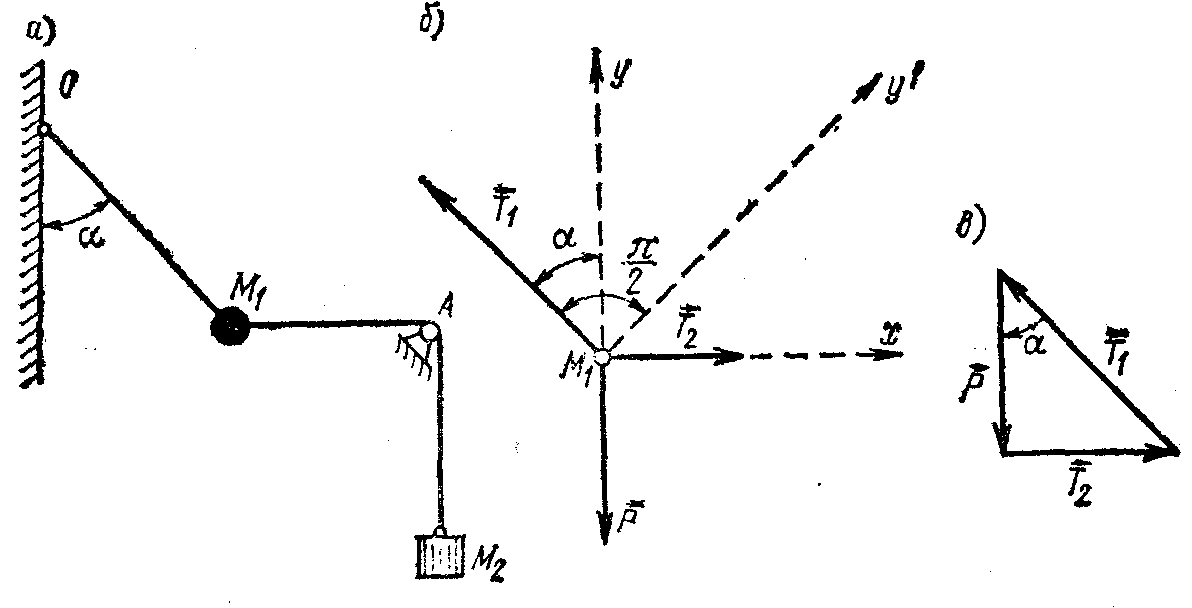 Рис. 178
Рис. 178
Геометрический способ. Так как точка M1 находится в равновесии под действием трех сил, то силовой треугольник, построенный на этих силах, должен быть замкнутым (рис. 178, в). Построение силового треугольника следует начинать с заданной силы .
Изобразив вектор , проводим через его начало и конец прямые, параллельные направлениям сил и . Точка пересечения этих прямых определит третью вершину силового треугольника. Ориентация всех векторов должна быть такова, чтобы силовой треугольник был замкнутым. Это дает возможность проверить правильность направления неизвестных реакций.
Из силового треугольника находим
T2 = P tg α; T1= P/cos α.
Таким образом, вес Q груза М2, равный , будет
Q = P tg α,
а натяжение троса OM1 численно равно Т1 = P/cos α.
Аналитический способ. Выберем оси координат так, чтобы уравнения равновесия имели наипростейший вид. Этого можно добиться, проводя оси перпендикулярно неизвестным силам, при этом они могут оказаться не ортогональными (оси M1y и М1у'). Обычно пользуются ортогональными осями. Проведем ось М1у перпендикулярно неизвестной силе а ось М1х - горизонтально.
Система приложенных сил , , - плоская сходящаяся система, для которой существуют два уравнения равновесия. В задаче две неизвестные величины: Т1 и Т2, т. е. задача статически определима.
Составим уравнения равновесия в форме (1):
![]()
![]()
Отсюда находим
T1 = P/cos α; T2 = T1 sin α = P tg α..
Если воспользоваться осями М1у и М1у', то получим
![]()
![]()
В каждое из этих уравнений входит только по одному неизвестному, что упрощает их нахождение.
Пример 2. Однородный цилиндр A весом Р и радиусом r (рис. 179, а) опирается на гладкую поверхность цилиндра В радиусом R и удерживается в равновесии с помощью нити CD длиной l, расположенной в поперечной плоскости симметрии. Определить натяжение нити и реакцию цилиндрической поверхности.
Решение. Рассмотрим равновесие цилиндра A. На него действует сила , направленная вертикально вниз. Связями являются гладкая цилиндрическая поверхность В и нить CD. Освободимся от связей.
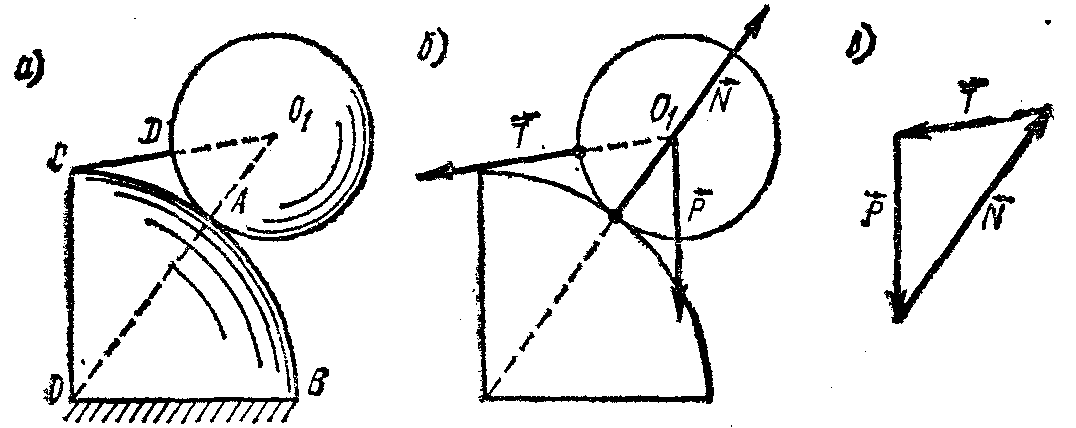
Рис. 179
Реакция
![]() (рис.
179, б) цилиндрической поверхности
направлена
по
общей нормали
к цилиндрам и, следовательно, проходит
через точку
O1.
Реакция
(рис.
179, б) цилиндрической поверхности
направлена
по
общей нормали
к цилиндрам и, следовательно, проходит
через точку
O1.
Реакция
![]() направлена по нити CD.
Так как на цилиндр А
действуют три силы, то на основании
теоремы о трех силах их линии действия
должны пересекаться в точке O1.
Следовательно, цилиндр А
при равновесии
займет такое положение, при котором
нить CD
будет продолжением его радиуса.
направлена по нити CD.
Так как на цилиндр А
действуют три силы, то на основании
теоремы о трех силах их линии действия
должны пересекаться в точке O1.
Следовательно, цилиндр А
при равновесии
займет такое положение, при котором
нить CD
будет продолжением его радиуса.
Построим силовой треугольник (рис. 179, в). Этот треугольник подобен ΔОО1С. Из подобия треугольников
![]()
или
![]() .
.
Отсюда находим
![]() .
.