

3. Фільтри
3.1. Цифрові фільтри з імпульсними характеристиками скінченної довжини. Метод зважування. Метод частотної вибірки
Завданням будь-якого дослідження є встановлення невідомих властивостей середовища або окремих конкретних об'єктів за даними спостережень процесів, що відбуваються. Досліджувані об'єкти можуть виявитися важкодоступними або зовсім недоступними для безпосереднього вивчення методами прямого контакту. Наприклад, про устрій земних надр на глибинах більше 10-15 км ми можемо судити винятково за даними сейсмічних хвиль, що пройшли крізь них та за характеристиками гравітаційних і магнітних полів Землі. Із цієї причини розробка методів математичної обробки й інтерпретації результатів спостережень, установлення взаємозв'язку між фізичними властивостями природних середовищ і процесів, що відбуваються в них, має велике значення.
Предмет цифрової фільтрації даних (сигналів) є природним введенням у широку й фундаментальну область цифрової обробки інформації. Під фільтрацією будемо розуміти будь-яке перетворення інформації (сигналів, результатів спостережень), за яким у вхідній послідовності даних, що обробляються, цілеспрямовано змінюються певні співвідношення (динамічні або частотні) між різними компонентами цих даних.
Як відомо, перетворення динаміки сигналів (і даних, які несуть ці сигнали) здійснюється в системах. Системи, що вибірково міняють форму сигналів (амплітудно-частотну або фазово-частотну характеристику), усунення або зменшення перешкод, витяг із сигналів певної інформації, поділ сигналів на певні складові, і т. под. називають фільтрами. Відповідно, фільтри з будь-яким цільовим призначенням є одним з випадків систем перетворення сигналів, у рамках теорії яких вони й будуть розглядатися.
До основних операцій фільтрації інформації відносять операції згладжування, прогнозування, диференціювання, інтегрування й розподілу сигналів, а також виділення інформаційних (корисних) сигналів і зменшення шумів (перешкод).
Основними методами цифрової фільтрації даних є частотна селекція сигналів і оптимальна (адаптивна) фільтрація.
У даному розділі розглядаються методи лінійної обробки даних (носіїв цих даних – сигналів) лінійними дискретними системами. Лінійними називають системи, які здійснюють перетворення лінійних комбінацій вхідних сигналів у суперпозицію вихідних сигналів. Принцип реалізації лінійних систем, фізичний – у вигляді спеціальних мікропроцесорних пристроїв, або алгоритмічний – у вигляді програм на ЕОМ, істотного значення не має й визначає тільки їхні потенційні можливості.
У загальному випадку терміном цифровий фільтр називають апаратну або програмну реалізацію математичного алгоритму, входом якого є цифровий сигнал, а виходом – інший цифровий сигнал з певним чином модифікованою формою й/або амплітудною і фазовою характеристикою. Класифікація цифрових фільтрів звичайно базується на функціональних ознаках алгоритмів цифрової фільтрації, відповідно до якого ЦФ підрозділяються на 4 групи: фільтри частотної селекції, оптимальні (квазіоптимальні), адаптивні й евристичні. Найбільш вивченими й випробуваними на практиці є ЦФ частотної селекції.
В
одномірній дискретній лінійній системі
зв'язок між входом і виходом (вхідними
й вихідними дискретними послідовностями
значень сигналу – відліками), задається
лінійним оператором перетворення
![]() :
:
![]()
Цей вираз відображає короткий запис лінійного різницевого рівняння:
|
(3.1) |
де
![]() – порядковий номер відліків;
– порядковий номер відліків;
– інтервал дискретизації сигналу;
![]() і
і
![]() – дійсні або, у загальному випадку,
комплексні коефіцієнти.
– дійсні або, у загальному випадку,
комплексні коефіцієнти.
Покладемо
![]() ,
що завжди можна зробити відповідним
нормуванням рівняння (3.1), і, приймаючи
надалі
,
що завжди можна зробити відповідним
нормуванням рівняння (3.1), і, приймаючи
надалі
![]() ,
тобто переходячи до числової нумерації
цифрових послідовностей значень
сигналів, приведемо його до вигляду:
,
тобто переходячи до числової нумерації
цифрових послідовностей значень
сигналів, приведемо його до вигляду:
|
(3.2) |
Оператор, представлений правою частиною даного рівняння, одержав назву цифрового фільтра (ЦФ), а операція, що він виконує, – цифрової фільтрації даних (інформації, сигналів). Якщо хоча б один з коефіцієнтів або залежить від змінної , то фільтр називається параметричним, тобто зі змінними параметрами. Ми будемо розглядати фільтри з постійними коефіцієнтами (інваріантними за аргументом).
Основні переваги цифрових фільтрів у порівнянні з аналоговими:
цифрові фільтри можуть мати параметри, реалізація яких неможлива в аналогових фільтрах, наприклад, лінійну фазову характеристику;
цифрові фільтри не вимагають періодичного контролю й калібрування, тому що їхня працездатність не залежить від дестабілізуючих факторів зовнішнього середовища, наприклад, температури;
один фільтр може обробляти кілька вхідних каналів або сигналів;
вхідні й вихідні дані можна зберігати для наступного використання;
точність цифрових фільтрів обмежена тільки розрядністю відліків, що використовується (довжиною слів).
фільтри можуть використовуватися при дуже низьких частотах і у великому діапазоні частот, для чого досить тільки змінювати частоту дискретизації даних.
Нерекурсивні
фільтри.
При нульових значеннях коефіцієнтів
рівняння (3. 2) переходить у рівняння
лінійної дискретної згортки функції
![]() з оператором
:
з оператором
:
|
(3.3) |
Значення
вихідних відліків згортки (3.3) для
будь-якого аргументу
визначаються поточними й „минулими”
значеннями вхідних відліків. Такий
фільтр називається нерекурсивним
цифровим
фільтром
(НЦФ). Інтервал підсумовування за
одержав назву „вікна”
фільтра.
Вікно фільтра становить
![]() відлік, фільтр є однобічним каузальним,
тобто обумовленим поточними й „минулими”
значеннями вхідного сигналу, і вихідний
сигнал не може випереджати вхідного.
Каузальний фільтр може бути реалізований
фізично в реальному масштабі часу. При
відлік, фільтр є однобічним каузальним,
тобто обумовленим поточними й „минулими”
значеннями вхідного сигналу, і вихідний
сигнал не може випереджати вхідного.
Каузальний фільтр може бути реалізований
фізично в реальному масштабі часу. При
![]() ,
а також при
,
а також при
![]() для фільтра (3.2), проведення фільтрації
припустиме тільки за умови завдання
початкових умов для точок
для фільтра (3.2), проведення фільтрації
припустиме тільки за умови завдання
початкових умов для точок
![]() ,
,
![]() і
і
![]() ,
,
![]() .
Як правило, у якості початкових умов
приймаються нульові значення, або
продовження перших відліків вхідних
сигналів або його тренда назад за
аргументом.
.
Як правило, у якості початкових умов
приймаються нульові значення, або
продовження перших відліків вхідних
сигналів або його тренда назад за
аргументом.
Під час обробки даних на ЕОМ обмеження стосовно каузальності знімається. У програмному розпорядженні фільтра можуть перебувати як „минулі”, так і „майбутні” значення вхідної послідовності відліків щодо поточної точки обчислень , при цьому рівняння (3.3) буде мати вигляд:
|
(3.4) |
Такий фільтр називається двостороннім симетричним. Симетричні фільтри, на відміну від однобічних фільтрів, не змінюють фази сигналу, що оброблюється.
Тому, що реакція НЦФ на одиничний вхідний імпульс (а рівно, й на будь-який довільний вхідний сигнал) завжди кінцева й обмежена розміром вікна фільтра, такі фільтри називають також фільтрами з кінцевою імпульсною характеристикою (КІХ-фільтри).
Техніка виконання фільтрації не відрізняється від техніки виконання звичайної дискретної згортки двох масивів даних.
Уявимо,
що на одній смужці паперу виписані один
за одним зверху донизу значення даних
![]() (рис. 11). Інша смужка паперу містить
записані у зворотному порядку значення
коефіцієнтів фільтра
(рис. 11). Інша смужка паперу містить
записані у зворотному порядку значення
коефіцієнтів фільтра
![]() (позначення
(позначення
![]() для коефіцієнтів операторів нерекурсивних
цифрових
фільтрів (НЦФ) є
загальноприйнятим).
для коефіцієнтів операторів нерекурсивних
цифрових
фільтрів (НЦФ) є
загальноприйнятим).

Рис. 11. Нерекурсивний ЦФ
Для
обчислення
![]() розташуємо другу смужку проти першої
таким чином, щоб значення
розташуємо другу смужку проти першої
таким чином, щоб значення
![]() збігалося зі значенням
збігалося зі значенням
![]() ,
помножимо всі значення
,
помножимо всі значення
![]() на
розташовані проти них значення
на
розташовані проти них значення
![]() ,
і підсумуємо всі результати множення.
Результат підсумовування є вихідним
значенням сигналу
,
і підсумуємо всі результати множення.
Результат підсумовування є вихідним
значенням сигналу
![]() .
Зсуваємо вікно фільтра – смужку
коефіцієнтів
.
Зсуваємо вікно фільтра – смужку
коефіцієнтів
![]() ,
на один відлік послідовності
вниз (або масив
зсуваємо на відлік догори) і обчислюємо
аналогічно наступне значення вихідного
сигналу, і т. д.
,
на один відлік послідовності
вниз (або масив
зсуваємо на відлік догори) і обчислюємо
аналогічно наступне значення вихідного
сигналу, і т. д.
Описаний процес є основною операцією цифрової фільтрації, і називається згорткою у дійсній області масиву даних з функцією (оператором) фільтра (масивом коефіцієнтів фільтра). Для математичного опису поряд з формулами (3.3 – 3.4) застосовуються також символічні форми запису фільтрації:
![]() .
.
Сума коефіцієнтів фільтра визначає коефіцієнт передачі (посилення) середніх значень сигналу у вікні фільтра та постійній складовій у цілому за масивом даних (з урахуванням початкових і кінцевих умов). Як правило, сума коефіцієнтів фільтра нормується до 1.
Є цілий ряд методів обробки даних, досить давно й широко відомих, які належать до методів цифрової фільтрації, хоча й не називаються такими. Наприклад, методи згладжування відліків у ковзному вікні постійної тривалості. Так, для лінійного згладжування даних за п'ятьма точками з однаковими ваговими коефіцієнтами використовується формула:
![]() .
.
З позицій цифрової фільтрації це є не що інше, як двосторонній симетричний нерекурсивний цифровий фільтр:
|
(3.5) |
Аналогічно, при згладжуванні даних методом найменших квадратів (МНК) на основі кубічного рівняння одержимо наступний НЦФ:
|
(3.6) |
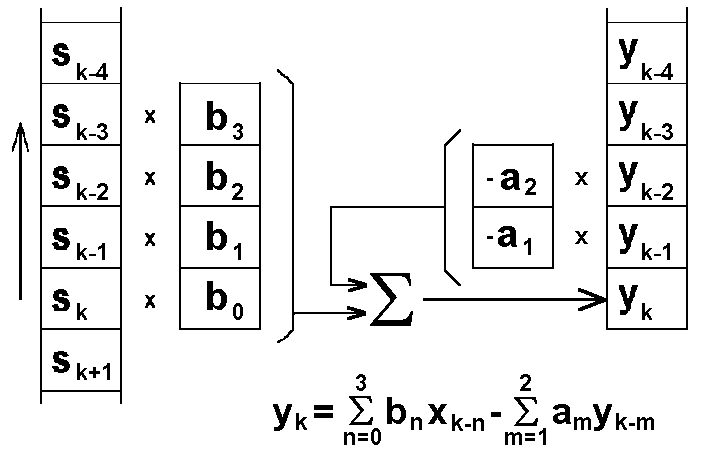
Рекурсивні фільтри. Фільтри, які описуються повним різницевим рівнянням (3.2)
прийнято називати рекурсивними цифровими фільтрами (РЦФ), тому що в обчисленні поточних вихідних значень беруть участь не тільки вхідні дані, але й значення вихідних даних фільтрації, які були обчислені в попередніх циклах розрахунків. З урахуванням останнього фактора рекурсивні фільтри називають також фільтрами зі зворотним зв'язком, додатним або від’ємним залежно від знака суми коефіцієнтів . Власне кажучи, повне вікно рекурсивного фільтра складається із двох складових: нерекурсивної частини , обмеженої в роботі поточними й „минулими” значеннями вхідного сигналу (при реалізації на ЕОМ можливо використання й „майбутніх” відліків сигналу) і рекурсивної частини , що працює тільки з „минулими” значеннями вихідного сигналу. Техніка обчислень для РЦФ наведена на рис. 12.
![]()
Рис. 12. Рекурсивний ЦФ
Області застосування НЦФ і РЦФ звичайно обумовлюються видом їхніх передатних функцій.
У принципі, нерекурсивні цифрові фільтри універсальні й здатні реалізувати будь-які практичні завдання обробки сигналів. Це й зрозуміло, тому що реакція РЦФ на одиничний імпульс Кронекера являє собою імпульсний відгук НЦФ, а, отже, завдання, які вирішуються за допомогою РЦФ, можуть виконуватися й НЦФ, але за умови відсутності обмежень на розміри вікна. У першу чергу це стосується реалізації КІХ-фільтрів з незатухаючим або слабко загасаючим імпульсним відгуком, наприклад, що інтегрують, або фільтрів рекурсивної деконволюції. Обмеження стосовно розмірів вікна є скоріше не теоретичним (нескінченних операторів НЦФ непотрібно, максимум – подвійна довжина вхідного сигналу для двосторонніх НЦФ), а чисто практичним. Нема сенсу застосовувати НЦФ із величезними розмірами операторів і витрачати машинний час, якщо те ж завдання в багато разів швидше вирішується рекурсивним фільтром.
Істотною перевагою НЦФ є їхня стійкість, можливість виконання у вигляді двосторонніх симетричних фільтрів, що не змінюють фазу вихідних сигналів щодо вхідних, і реалізації строго лінійних фазових характеристик.
З
іншого боку, нерекурсивні фільтри можуть
бути перетворені в рекурсивні фільтри,
якщо є можливість
![]() -поліном
передатної функції НЦФ виразити у
вигляді відношення двох коротких
-поліномів
РЦФ типу (3.2), що може дати істотне
підвищення продуктивності обчислень.
Як правило, така можливість є для збіжних
степеневих рядів. Відношення двох
-поліномів
дозволяє реалізувати короткі й дуже
ефективні фільтри із крутими зрізами
на частотних характеристиках.
-поліном
передатної функції НЦФ виразити у
вигляді відношення двох коротких
-поліномів
РЦФ типу (3.2), що може дати істотне
підвищення продуктивності обчислень.
Як правило, така можливість є для збіжних
степеневих рядів. Відношення двох
-поліномів
дозволяє реалізувати короткі й дуже
ефективні фільтри із крутими зрізами
на частотних характеристиках.