

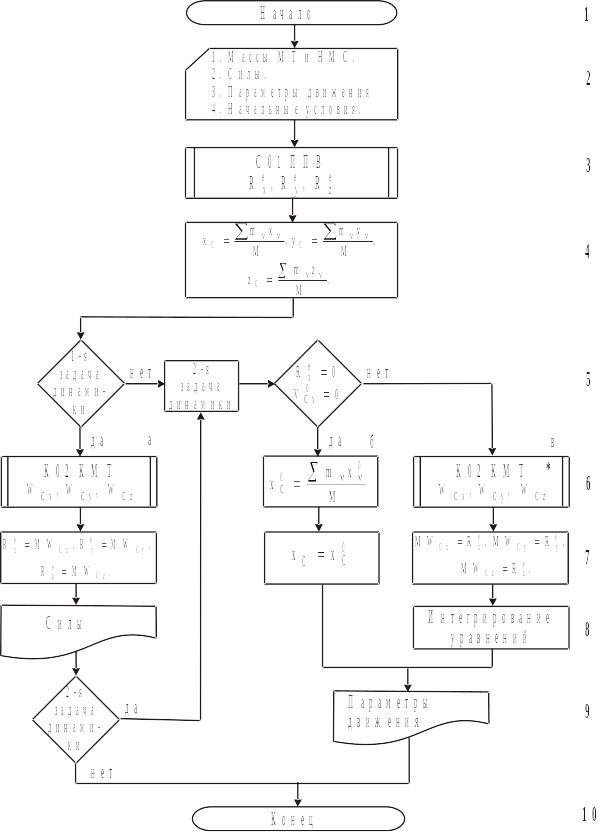
4.5. Алгоритм решения задач с помощью теоремы о движении центра масс смт – схема алгоритма д45 цмс с комментариями и примерами
Комментарии
К.2. Рассматриваемый объект принимается за МС, указывается система отсчета, в которой исследуется ее движение. Выделяются и нумеруются МТ и НМС, входящие в МС. На чертеже изображается силовая схема, т.е. рисуются все внешние силы и моменты, действующие на МС, в том числе внешние пассивные силы и моменты – реакции связи на основании принципа освобождаемости от связей (аксиома 5 статики). Формулируются начальные условия.
К.3, 4. Находятся проекции главного вектора внешних сил и радиуса-вектора центра масс только на те направления (оси), вдоль которых необходимо определить силы (1-я задача динамики) и перемещения или кинематические параметры (2-я задача динамики).
Координаты центра масс МС вычисляются для текущего или заданного момента времени через заданные размеры и параметры движения. Для определения координат центра масс может быть использована схема алгоритма С08 ОЦТ (Ч.2 Статика), а в случае сложного движения МТ, входящей в МС, алгоритм К07 СДТ (Ч.1 Кинематика).
К.5.б.
Для случая
![]() и
и
![]() ось x выбрана для определенности. В
реальной задаче такой осью может быть
любая другая.
ось x выбрана для определенности. В
реальной задаче такой осью может быть
любая другая.
К.8.в. При интегрировании используются либо метод разделения переменных, либо теория линейных дифференциальных уравнений первого и второго порядков. Постоянные интегрирования находятся с помощью начальных условий.
Примечание
Теорема о движении центра масс МС чаще всего применяется в случаях, когда НМС совершает поступательное движение, а МТ - любое движение, для определения перемещений того или иного объекта и для определения пассивных сил – реакций связи, вызванных этими перемещениями.
Пример 1
2
Электрический мотор массы
![]() установлен без крепления на негладком
горизонтальном фундаменте (коэффициент
трения скольжения f). На валу мотора под
прямым углом закреплен одним концом
однородный стержень длиной 2
и массы
установлен без крепления на негладком
горизонтальном фундаменте (коэффициент
трения скольжения f). На валу мотора под
прямым углом закреплен одним концом
однородный стержень длиной 2
и массы
![]() .
На другой конец стержня насажен точечный
груз массы
.
На другой конец стержня насажен точечный
груз массы
![]() (рис. 31). Угловая скорость вала постоянна
и равна
(рис. 31). Угловая скорость вала постоянна
и равна
![]() .
Определить суммарную силу давления
.
Определить суммарную силу давления
![]() на фундамент, горизонтальное перемещение
мотора и условия, при которых мотор
будет подпрыгивать, не будучи прикреплен
болтами.
на фундамент, горизонтальное перемещение
мотора и условия, при которых мотор
будет подпрыгивать, не будучи прикреплен
болтами.
Решение задачи по алгоритму визуализировано.
Рис. 31
В начальный момент мотор находится в покое и стержень горизонтален. Ось х горизонтальна, ось у проходит через вал в начальный момент времени.
МС состоит из: двух АТТ (мотор и стержень) и МТ (груз).
3 С04 ППВ
С04 ППВ
3
Обозначим координаты центра масс мотора через х1, у1, центра масс стержня х2, у2, и координаты груза х3, у3 в момент времени t. Координаты центра масс стержня и груза записы-ваются с учетом того, что они участвуют в сложном движении (переносном движении вместе с мотором и относительном вращательном движении относительно мотора).
4

![]()
здесь
![]() – перемещение мотора (переменная
величина),
– перемещение мотора (переменная
величина),
![]()
здесь
![]()
5 1-я задача динамики – определить силу реакции фундамента
![]() (используется проекция на ось у).
(используется проекция на ось у).
6 а
К01
КМТ
а
К01
КМТ
![]()
8б![]()
7а
![]()
8а
![]()
Ответ:
![]()
Мотор
будет подпрыгивать над фундаментом,
если
![]() ,
,
т.е.
при
![]() ,
,
![]() .
.
9а 2-я задача динамики – определить горизонтальное переме-
щение
![]() мотора (используется проекция на ось
х).
мотора (используется проекция на ось
х).
5
![]() .
.
6в
![]()
![]()
7в
![]()
![]() .
.
Подставляется
из 8а и
определяется
![]() :
:
![]()
8в Дважды интегрируется предыдущее уравнение
![]()
Постоянные интегрирования определяются с помощью начальных условий:
при
t = 0 x = 0, следовательно,
![]()
при t = 0
![]() ,
следовательно,
,
следовательно,
![]()
9в
Ответ:
![]() .
.