

Структурный и кинематический анализ механизмов
.pdfФедеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
“МАТИ” – Российский государственный технологический университет имени К.Э. Циолковского
Кафедра “Механика машин и механизмов”
СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Методические указания к курсовому проектированию по теории механизмов и машин
Составители: Чуфистов В.А. Шувалова Л.С.
Москва 2006 г.
Введение
Курсовой проект по теории механизмов и машин состоит из расчетнопояснительной записки и 4-5 листов формата 24 ГОСТ 2301-68 графических построений.
На первом листе выполняется кинематическое исследование шарнирнорычажного механизма.
Исходные данные:
1.План механизма и его основные размеры.
2.Частота вращения кривошипа - ω, с-1.
3.Три положения механизма.
Требуется:
1.Выполнить структурный анализ механизма.
2.Построить:
•траектории движения указанных точек для 12 положений механизма;
•совмещенный план скоростей для 12 положений механизма;
•планы ускорений для 3 заданных положений механизма;
•кинематические диаграммы-графики «перемещение-время», «скорость-время» и «ускорение-время» для точки Е ползуна.
Прежде чем приступить к кинематическому исследованию механизма, необходимо произвести его структурный анализ. Структурный анализ дает возможность определить порядок кинематического исследования.
2
Раздел 1
1. Структурный анализ механизмов
Произвести структурный анализ механизма – это значит установить, из каких групп звеньев состоит данный механизм и в какой последовательности эти группы звеньев присоединяются друг к другу, а также определить степень подвижности, класс и порядок механизма.
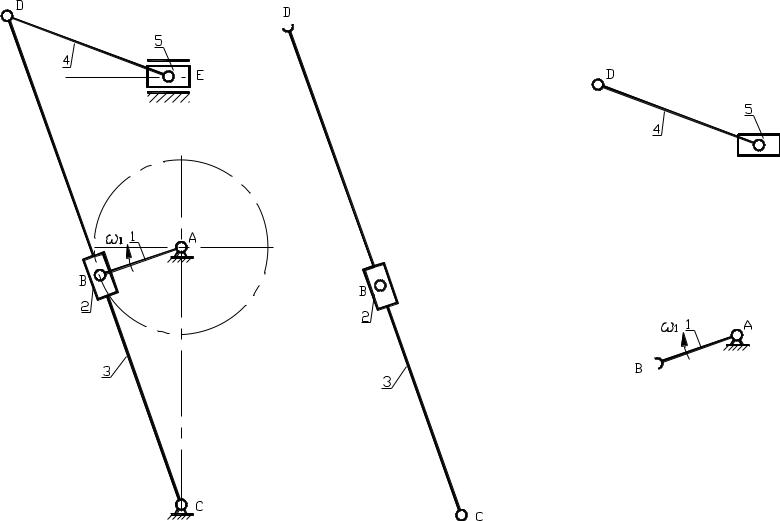
Пример 1. Механизм строгального станка с диадой II модификации частного вида (рис. 1а).
Механизм состоит из: кривошипа 1, кулисного камня 2, кулисы 3, шатуна 4, ползуна 5 и стойки 6. Звенья соединяются кинематическими парами: 1-6 - вращательная пара (шарнир) с центром А, 1-2 – вращательная пара (шарнир) с центром В, 2-3 – поступательная пара, 3-6 – вращательная пара с центром С, 3-4
– вращательная пара с центром Д, 4-5 – вращательная пара с центром Е и 5-6 – поступательная пара.
Все кинематические пары – низшие. Степень подвижности механизма определяется по формуле Чебышева:
W =3n − 2P1 − P2 =3 5 − 2 7 − 0 =1,
где n =5 - число подвижных звеньев механизма,
P1 = 7 - число низших кинематических пар,
P2 = 0 - число высших кинематических пар.
Разбивку механизма на структурные группы начинаем с выделения начального механизма 1-6. Структурная группа присоединяется к условному механизму внешними кинематическими парами. Звено 2 присоединяется к кривошипу 1 шарниром В (внешняя кинематическая пара) , звено 3 присоединяется к стойке 6 шарниром С (внешняя кинематическая пара), а между собой звенья 2 и 3 образуют внутреннюю поступательную кинематическую пару 2-3. Таким образом, звено 2 и звено 3 дают двухповодковую группу – диаду III модификации частного вида. Звено 4
3
Д2МЧВ г)
4
б) НМ
Д3МЧВ
Рис. 1
а) |
в) |
|
присоединяется к звену 3 шарниром Д (внешняя кинематическая пара), ползун 5 со стойкой 6 образуют поступательную пару 5-6 (внешняя кинематическая пара), а между собой звенья 4 и 5 соединены шарниром Е (внутренняя кинематическая пара). Таким образом, шатун 4 и ползун 5 образуют двухповодковую группу – диаду II модификации частного вида. Следовательно, рассматриваемый механизм образован последовательным присоединением к начальному механизму 1-6 (рис. 1б) двух двухповодковых групп: 2-3 (рис. 1в) и 4-5 (рис. 1г).
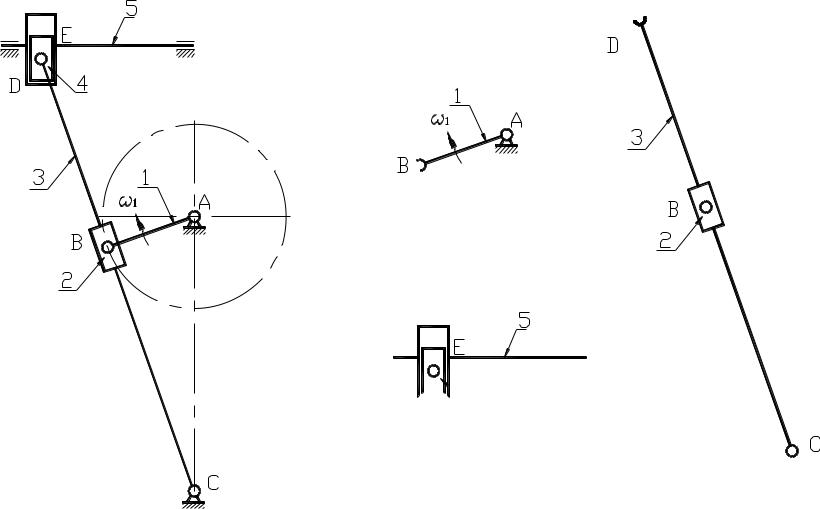
Пример 2. Механизм строгального станка с диадой V модификации частного вида (рис. 2а).
Этот механизм отличается от предыдущего тем, что вместо диады II модификации частного вида здесь присоединена диада V модификации частного вида. Кулиса 3 соединяется с ползуном 4 шарниром Д (внешняя кинематическая пара), ползун 4 перемещается в тубусе звена 5 (внутренняя поступательная кинематическая пара), а звено 5, в свою очередь, движется по направляющим стойки 6 (внешняя поступательная кинематическая пара).
Степень подвижности механизма:
W = 3n − 2P1 − P2 = 3 5 − 2 7 − 0 =1.
Механизм образован последовательным присоединением к начальному механизму 1-6 (рис. 2б), сначала диады III модификации частного вида 2-3 (рис. 2в), а затем V модификации частного вида 4-5 (рис. 2г).
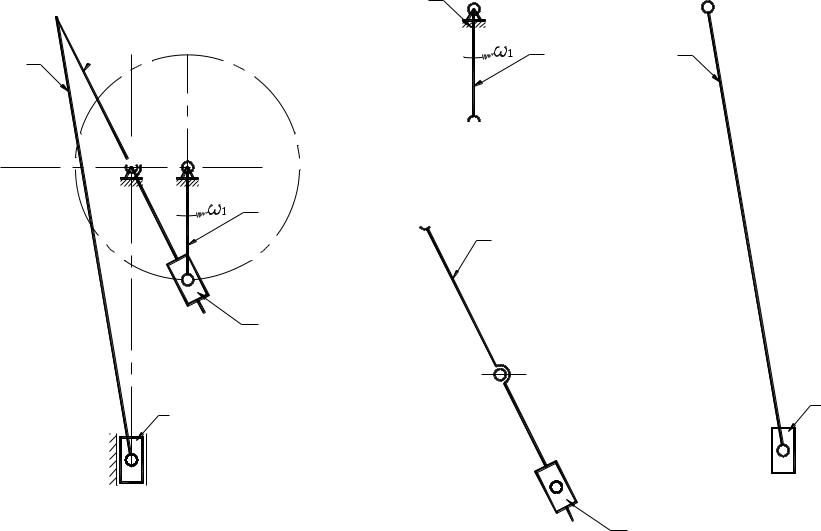
Пример 3. Механизм долбежного станка с вращающейся кулисой (рис. 3а). Механизм состоит из кривошипа 1, кулисного камня 2, кулисы 3, шатуна
4, ползуна 5 и стойки 6. Степень подвижности механизма:
W=3n − 2P1 − P2 =3 5 − 2 7 − 0 =1.
Кначальному механизму 1-6 (рис. 3б) сначала присоединяется диада III модификации частного вида (рис. 3в), а затем диада II модификации частного вида 4-5 (рис. 3г).
5
НМ
б)
6


 Д5МЧВ Д3МЧВ г) в)
Д5МЧВ Д3МЧВ г) в)
а) |
Рис. 2 |











 D 3 4
D 3 4 


















 C A
C A
1
B
7
2
|
5 |
а) |
E |
|
|
|
Рис. 3 |
6
НМ
б)


 D
D
Д3МЧВ в)
A |
D |
1 |
4 |
B |
|
3
C |
Д2МЧВ |
|
|
|
5 |
|
г) |
|
E |
|
B |
|
2 |

Пример 4. Механизм строгального станка с вращающейся кулисой (рис. 4а). Механизм состоит из начального механизма 1-6 (рис. 4б), диады III
модификации частного вида 2-3 (рис. 1в) и диады II модификации частного вида 4-5 (рис. 4г).
Степень подвижности механизма:
W =3n − 2P1 − P2 =3 5 − 2 7 − 0 =1.
|
|
в) |
НМ |
Д3МЧВ |
Д2МЧВ |
б) |
|
г) |
Рис. 4
а)
8
Раздел II. Кинематическое исследование механизмов
1. Основные задачи и методы
Основными задачами кинематического исследования механизмов являются:
•определение положений звеньев (построение планов положений механизма);
•определение скоростей и ускорений точек;
•определение угловых скоростей и ускорений звеньев.
За ведущее звено во всех механизмах принимаем кривошип и считаем его угловую скорость ω1 , рад/с постоянной. Исследования проводим графоаналитическими методами. Так, положения звеньев определяем методом засечек, скорости и ускорения различных точек механизма находим с помощью построения планов скоростей и ускорений.
2. Построение траекторий движения характерных точек механизма
Чтобы построить траекторию какой-либо точки, надо построить ряд планов механизма и определить положения заданной точки. Плавная кривая, проведенная через полученные положения точки, будет искомой траекторией.
Построение выполняем в масштабе μA = |
AAB |
, |
м |
, где AAB - |
длина кривошипа |
|
AB |
мм |
|||||
|
|
|
|
|||
в м; AB – длина кривошипа на плане механизма в мм. |
|
|||||
Кривошип совершает полное круговое |
движение, |
и траекторией |
||||
движения точки В будет окружность. Делим окружность, радиус которой равен длине кривошипа АВ, на 12 равностоящих положений. Одно из положений точки В принимается за нулевое, а остальные пронумеровываются в направлении вращения кривошипа. За нулевое положение точки В кривошипа выбирают такое, при котором дальнейшее движение точки В в заданную сторону вращения будет соответствовать рабочему ходу исполнительного механизма.
9
Для механизмов строгального станка нулевое положение соответствует крайнему левому положению ползуна 5. В этом положении кулиса 3 также занимает крайнее левое положение и перпендикулярна кривошипу.
Для механизмов долбежного станка нулевое положение соответствует верхнему положению ползуна 5.
Построение траекторий движения других точек механизма покажем на конкретных примерах.
Пример 1. Механизм поперечно-строгального станка диадой II модификации частного вида
Точка Д (рис. 5) движется по дуге окружности, радиус которой равен длине кулисы СД. Последовательно соединяем точку С с точками B0 , B1 , B2 и
т.д. и находим положение кулисы в соответствующих положениях механизма. Пересечение кулисы с траекторией движения точки Д определяет положение в первом ( Д1), втором ( Д2 ) и т.д. положениях механизма. Крайнее правое положение кулисы обозначено CB7 , Д7 .
Из точки Д делаем засечки на направляющей ползуна 5 радиусом, равным длине ДЕ, и находим положения точки Е. Траектория движения точки Е есть горизонтальная прямая, соединяющая крайние положения ползуна 5 : E0 − E7 .
Пример 2. Механизм поперечно-строгального станка с диадой V модификации частного вида
Положения точки Д (рис. 6) и ее траектория определяются аналогично предыдущему механизму (рис. 5). Положения точки Е найдем как проекцию точек Д на направление движения ползуна 5.
Пример 3. Механизм долбежного станка с вращающейся кулисой Траектория точки Д (рис. 7) есть окружность, радиус которой равен длине
кулисы СД. Положения точки Д, соответствующие различным положениям механизма, определяются геометрическим построением. Нулевое положение
10