

Метод графического дифференцирования
Данный метод применяется для звеньев, совершающих прямолинейное возвратно – поступательное движение (ползуны).
Определение скоростей точек 4-ех звенного механизма с помощью построения плана
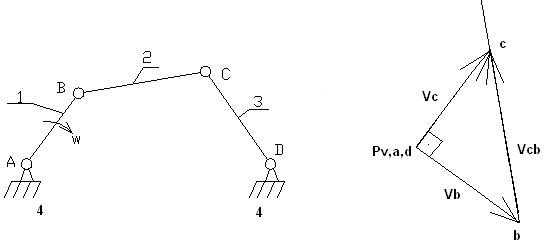
Построение планов скоростей.
![]()
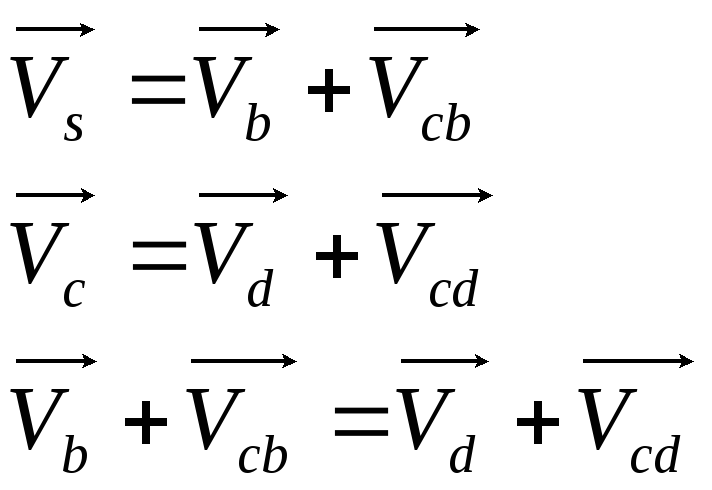
1)![]() ,
где
,
где![]() -скорость
т.В по отношению к А
-скорость
т.В по отношению к А
![]()
2)
План начинается с построения полюса. Полюс- начало координат.

Теорема подобия
Жесткие звенья на плане механизма, планах скоростей, планах ускорения отображаются подобными фигурами. Правило обхода соблюдается.
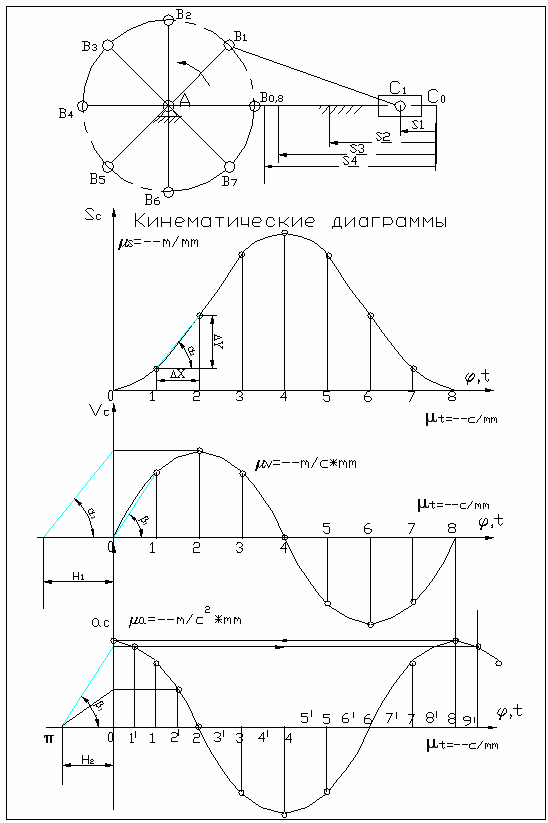
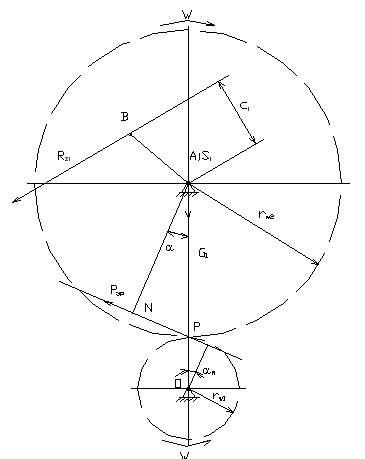
Построение плана скоростей шестизвенного механизма строгального станка (рисунок построения будет приведен ниже).

![]()
Линейный план скоростей
Точка m находиться на bc. Все отрезки на плане скоростей соответственно подобны отрезкам на схеме.
![]()
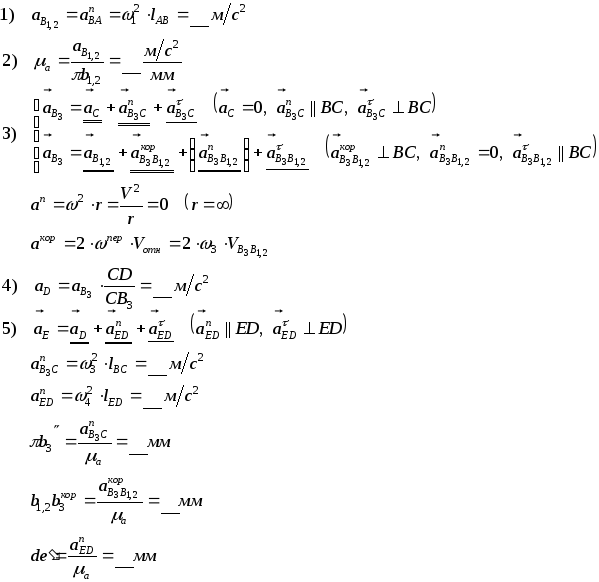
Построение планов ускорений

![]() –масштабный
коэффициент
–масштабный
коэффициент
Построение плана ускорений четырёхзвенного механизма
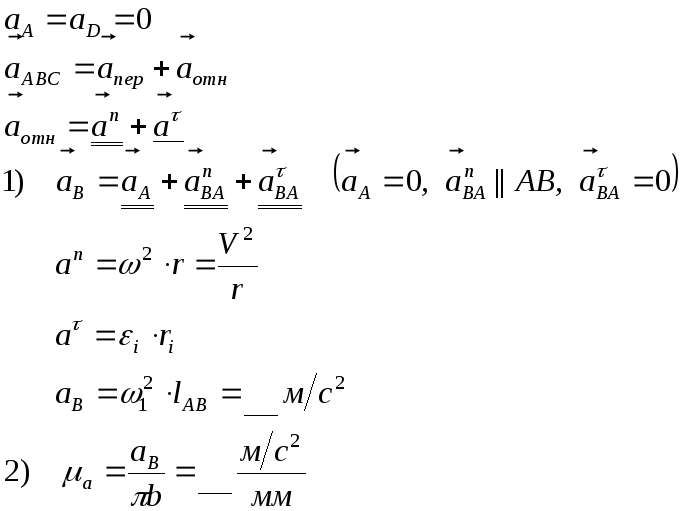
![]() –масштабный
коэффициент на плане ускорений
–масштабный
коэффициент на плане ускорений
![]() –полюс
ускорений
–полюс
ускорений

Полюс обычно ставиться в правую верхнюю часть листа.
– угловое ускорение.
Направление углового ускорения совпадает с направлением касательного ускорения.
Построение плана скоростей и ускорений шестизвенного механизма строгального станка
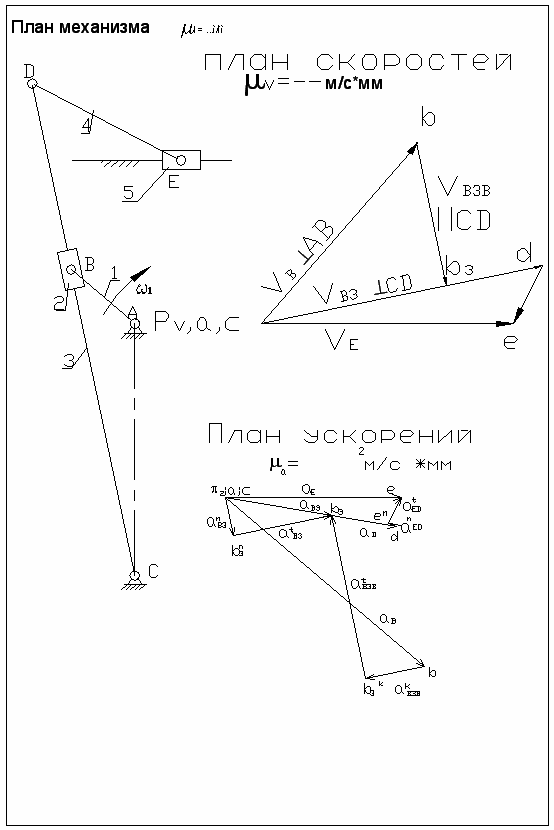
План скоростей

План ускорений

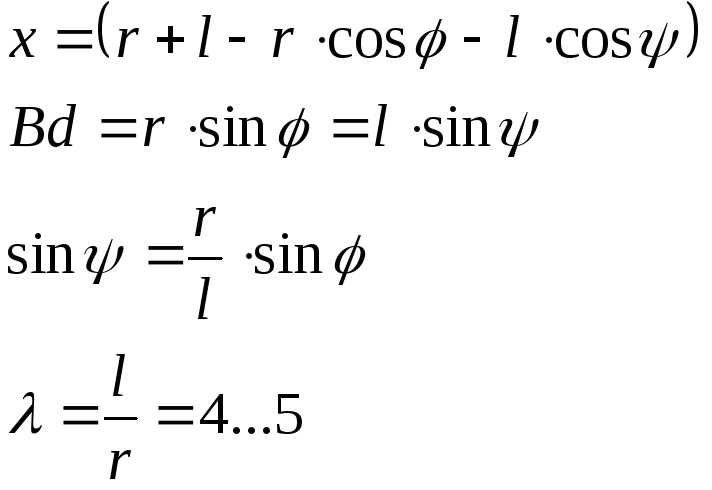
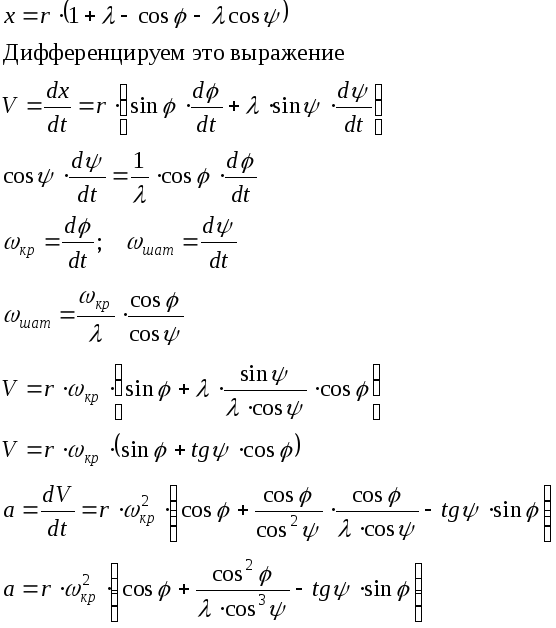
Кинематическое исследование аналитическим методом
Силовой анализ рычажных механизмов
Принцип Даламбера
![]()

![]()

![]()
![]() –площадь
поперечного сечения
–площадь
поперечного сечения

Получили соотношение для стержней.
К примеру известно:
1) Направление ( перпендикулярно направляющей)
Неизвестно:
1) Величина
2) Точка приложения
Для звена можно составить три уравнения равновесия:
![]()
Должно быть:
Число уравнений = числу неизвестных
3n - число уравнений
![]() -
число неизвестных
-
число неизвестных
![]()
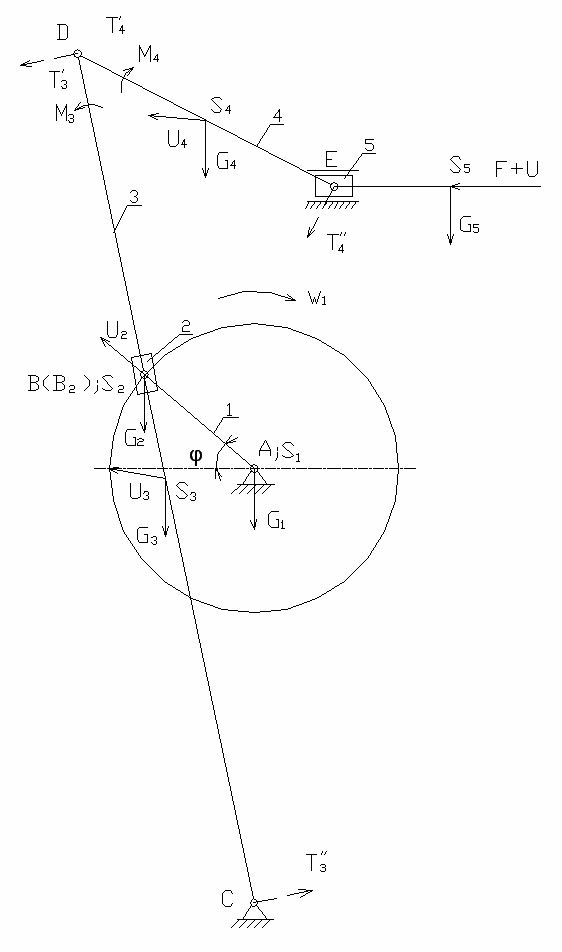
Для нахождения реакций в кинематических парах надо разбить механизм на группы Ассура.
1)
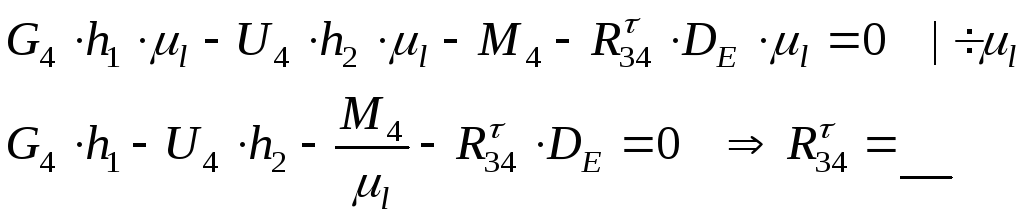
![]() =0
(4 звено) +
=0
(4 звено) +![]()
![]()

По знаку реакции уточняется направление.

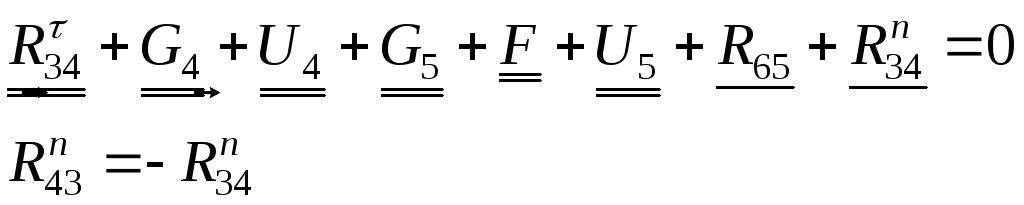
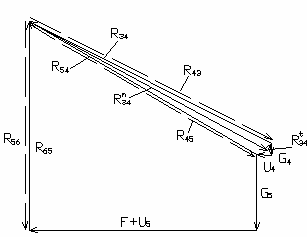
2)
![]() (4 и 5 звено)
(4 и 5 звено)
3)
![]() (5 звено)
(5 звено)
![]()
![]()
4)
![]() (4 звено)
(4 звено)
![]()
Разбираем звенья: 3; 2:
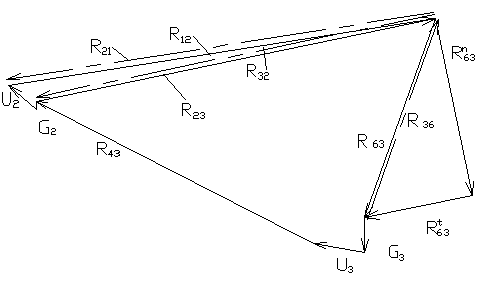
1)
![]() (звено 3)
(звено 3)
![]()
![]()

2)
![]() (звено 2)
(звено 2)
![]()
3)
![]() ( звено 2)
( звено 2)
![]()
4)
![]() (звено 3)
(звено 3)
![]()
Начальный механизм
1)![]()
![]()
![]()
![]()
2)
![]() (начальный механизм)
(начальный механизм)
![]()

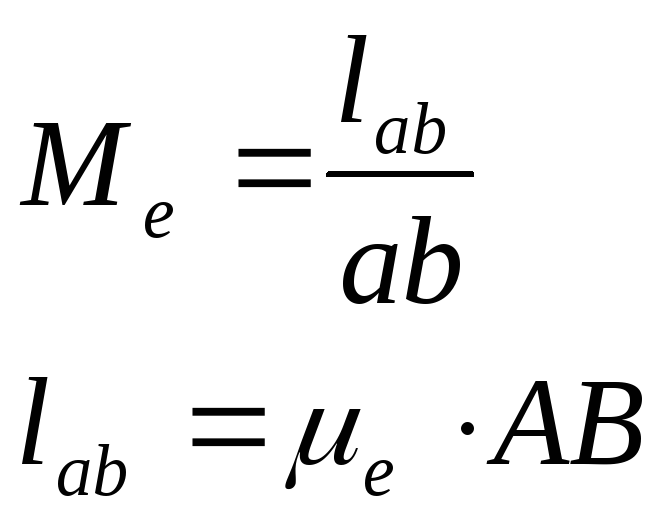
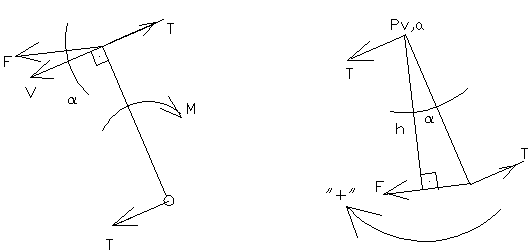
Силовой анализ методом «жесткого рычага» Жуковского.
Теорема Жуковского: cумма моментов всех сил, приложенных в соответствующей точке плана скоростей повёрнутых на 90º, пропорциональна мгновенной мощности механизма.
Алгоритм:
Построить план скоростей
Повернуть план скоростей относительно полюса на 90°
В соответствующие точки плана скоростей перенести параллельно самим себе все силы, действующие на звенья механизма
Найти сумму моментов всех сил относительно полюса
Решить уравнение и найти значение уравновешивающей силы
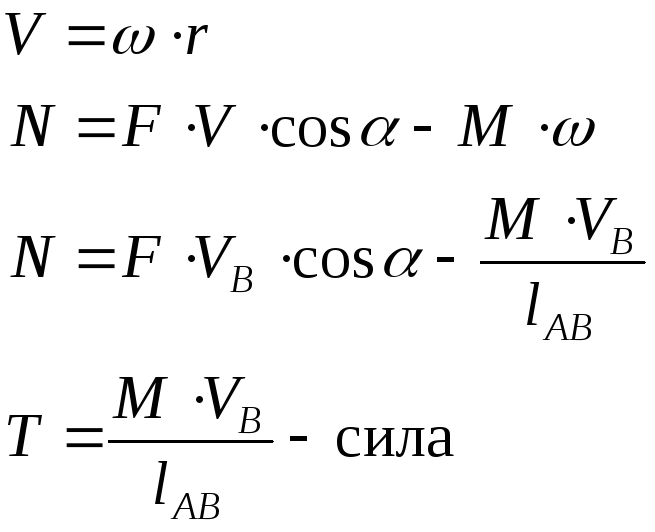

Сумма моментов пропорциональна мощности