

Профилирование эвольвентных зубчатых колес
.pdfФедеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
“МАТИ” – Российский государственный технологический университет имени К.Э. Циолковского
Кафедра “Механика машин и механизмов”
ПРОФИЛИРОВАНИЕ ЭВОЛЬВЕНТНЫХ ЗУБЧАТЫХ КОЛЁС
Методические указания к курсовому проектированию по “Теории механизмов и машин”
Составители: Гаценко А.А. Шувалова Л.С.
Москва 2006 г.

Андрей Александрович Гаценко Людмила Сергеевна Шувалова
ПРОФИЛИРОВАНИЕ ЭВОЛЬВЕНТНЫХ ЗУБЧАТЫХ КОЛЕС
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ккурсовому проектированию по курсу <<Теория механизмов и машин>>
Редактор М.А. Соколова
Подписано в печать Объем1,25 п.л. Тираж 150 экз. Заказ № от
Ротапринт МАТИ-РГТУ, Берниковская наб., 14
2
СОДЕРЖАНИЕ
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ И РАЗМЕРНОСТИ ВЕЛИЧИН______ 4
1.ОБЩИЕ УКАЗАНИЯ ______________________________________ 5
1.1.ИСХОДНЫЕ ДАННЫЕ ___________________________________5
1.2.ПОРЯДОК РАБОТЫ _____________________________________ 5
2.РАСЧЕТ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕ-
СКИХ ЭВОЛЬВЕНТНЫХ ЗУБЧАТЫХ ПЕРЕДАЧ ВНЕШНЕГО ЗАЦЕПЛЕ-
НИЯ ____________________________________________________________ 6 2.1. ПРОВЕРКА ПРАВИЛЬНОСТИ РАСЧЕТА____________________8
3.ПОСТРОЕНИЕ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ ДВУХ КО-
ЛЕС_____________________________________________________________9
4.ПОСТРОЕНИЕ СТАНОЧНОГО ЗАЦЕПЛЕНИЯ________________15
4.1.ПОСТРОЕНИЕ ИСХОДНОГО ПРОИЗВОДЯЩЕГО КОНТУРА
РЕЙКИ _________________________________________________________15
4.2.ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ИСХОДНОЙ ПРОИЗВОДЯЩЕЙ РЕЙКИ ОТНОСИТЕЛЬНО НАРЕЗАЕМОГО КОЛЕСА_________________15
4.3.ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ЦЕНТРА НАРЕЗАЕМОГО КО-
ЛЕСА___________________________________________________________16
4.4.ПОСТРОЕНИЕ ЛИНИИ ЗАЦЕПЛЕНИЯ PN__________________16
4.5.ПОСТРОЕНИЕ ЛЕВОГО ПРОФИЛЯ ЗУБА ШЕСТЕРНИ______ 16
4.6.ПОСТРОЕНИЕ ПРАВОГО ПРОФИЛЯ ЗУБА ШЕСТЕРНИ_____17
4.7.ПОСТРОЕНИЕ ПЕРЕХОДНОЙ КРИВОЙ ЗУБА______________17
ЛИТЕРАТУРА______________________________________________18
3
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ И РАЗМЕРНОСТИ ВЕЛИЧИН
m – модуль зацепления, мм Z1 – число зубьев шестерни Z2 – число зубьев колеса
Z1 min– минимальное число зубьев шестерни, нарезаемое без подреза β – угол наклона зуба, град
P – шаг зубьев рейки, мм
αW – межосевое расстояние, мм
rв 1, rв 2 – радиусы основных окружностей шестерни и колеса, мм rw 1, rw 2 – радиусы начальных окружностей шестерни и колеса, мм r 1, r 2 – радиусы делительных окружностей шестерни и колеса, мм rа 1, rа 2 – радиусы окружностей вершин шестерни и колеса, мм
rf 1, rf 2 – радиусы окружностей впадин шестерни и колеса, мм ρи – радиус скругления ножки зуба, мм
h – высота зуба шестерни или колеса, мм HПК – полная высота зуба рейки, мм
S – делительная толщина зуба рейки, мм
S 1, S 2 – толщины зубьев по дуге делительной окружности шестерни и колеса, мм
S а1, S а2 – толщины зубьев по дуге окружности вершин шестерни и колеса, мм
P 1X, P 2X – шаги зубьев по хорде делительной окружности шестерни и колеса, мм
α– угол профиля нормальный исходного контура, град αt – угол профиля торцовый исходного профиля, град
αW1, αW2 – углы зацепления шестерни и колеса, град
τ1, τ2 – шаги угловые зубьев шестерни и колеса, град X 1 – коэффициент смещения шестерни
X 2 – коэффициент смещения колеса
X1 min– минимальный коэффициент смещения при нарезании шестерни С* – коэффициент радиального зазора нормальный исходного контура С*t – коэффициент радиального зазора торцовый исходного контура y – коэффициент воспринимаемого смещения
y – коэффициент уравнительного смещения
h*а – коэффициент высоты головки исходного контура
εα – коэффициент торцового перекрытия прямозубой передачи εβ – коэффициент торцового перекрытия косозубой передачи εγ – суммарный коэффициент перекрытия λ1, λ2 – коэффициенты скольжения для шестерни и колеса υ – коэффициент удельного давления.
4
1. ОБЩИЕ УКАЗАНИЯ.
На третьем листе курсового проекта по ТММ выполняют проектирование эвольвентного прямозубого зацепления, содержащее расчетную и графическую части.
Расчетная часть включает определение геометрических параметров зубчатых колес и некоторых качественных показателей передачи.
Графическая часть выполняют на листе формата А1. Эта часть курсового проекта содержит:
а) станочное зацепление шестерни с рейкой; б) эвольвентное зацепление зубчатых колес.
1.1. Исходные данные
1)Число зубьев шестерни - Z1 и колеса - Z2.
2)Модуль - m ,мм.
3)Параметры исходного контура для реечного инструмента по ГОСТ
13755-81: α =20°; ha* = 1; C* = 0,25; ρи = 0,38m,
где α - угол профиля зуба рейки;
ha* - коэффициент высоты головки; C* - коэффициент радиального зазора;
ρи - радиус закругления, мм
1.2. Порядок работы
1)Выполнить расчет геометрических параметров.
2)Построить станочное зацепление шестерни и инструментальной
рейки.
3)Построить эвольвентное зацепление шестерни и зубчатого колеса.
4)На боковых поверхностях соприкасающихся зубьев показать активные участки профиля зубьев.
5)На основании графического построения определить коэффициент торцового перекрытия εα и сравнить его с вычисленным значением εα рас.:
εα |
= |
εα −εαрас |
100% . |
|
|||
|
|
εα |
|
5
2. РАСЧЕТ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ЭВОЛЬВЕНТНЫХ ЗУБЧАТЫХ ПЕРЕДАЧ ВНЕШНЕГО
ЗАЦЕПЛЕНИЯ.
Выбрать величину коэффициентов смещений Х1 и Х2 с учетом рекомендаций ГОСТ 16532-70 для силовых зубчатых передач. Эти рекомендации приведены в таблице 1.
Необходимо, чтобы выполнялось условие:
|
|
|
Х1 ≥ Х1min, |
(1) |
где |
X1 min = |
17 − Z1 |
, а Z1 – число зубьев шестерни. |
|
17 |
|
|||
|
|
|
|
Таблица 1. Рекомендации по выбору коэффициентов смещении Х1 и Х2
Коэффициент смещения |
Область применения |
||
|
|
|
|
X1 |
Х2 |
|
|
|
|
10 ≤ Z1 ≤ 30 |
|
0,5 |
0,5 |
||
|
|||
|
|
|
|
0 |
0 |
Z1 > 30 |
|
|
|
|
|
Определить угол зацепления αW
invαW =invα + |
2(X1 + X 2 ) |
tgα . |
(2) |
|
|||
|
Z1 +Z2 |
|
|
Значения эвольвентного угла профиля inv α приведены в табл. 2.
Таблица 2. Значение эвольвентного угла профиля inv α.
α |
16°30' |
17° |
17°30' |
18° |
18°30' |
19° |
19°30' |
|
|
|
|
|
|
|
|
invα |
0,0082 |
0,0090 |
0,0099 |
0,0108 |
0,0117 |
0,0127 |
0,0138 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
20° |
20°30' |
21° |
21°30' |
22° |
22°30' |
23° |
|
|
|
|
|
|
|
|
invα |
0,0149 |
0,0161 |
0,0173 |
0,0187 |
0,0200 |
0,0215 |
0,0230 |
|
|
|
|
|
|
|
|
α |
23°30' |
24° |
24°30' |
25° |
25°30' |
26 |
26°30' |
|
|
|
|
|
|
|
|
invα |
0,0247 |
0,0263 |
0,0281 |
0,0300 |
0,0319 |
0,0339 |
0,0361 |
|
|
|
|
|
|
|
|
α |
27° |
27°30' |
28° |
28°30' |
29° |
29°30' |
30° |
|
|
|
|
|
|
|
|
invα |
0,0383 |
0,0406 |
0,0430 |
0,0455 |
0,0482 |
0,0509 |
0,0537 |
|
|
|
|
|
|
|
|
Примечание к табл. 2. Промежуточные значения эвольвентного угла профиля inv α определяют линейным интерполированием.
6
Определить коэффициент воспринимаемого смещения
|
Z1 +Z2 |
|
cosα |
|
|
|
|
||
y = |
|
|
|
−1 . |
2 |
|
|||
|
cosαW |
|
||
Определить коэффициент уравнительного смещения
y = (X1 + X 2 ) − y .
Подсчитать межосевое расстояние |
||||
|
m(Z1 +Z2 ) |
cosα |
||
aW = |
|
|
|
. |
2 |
|
cosαW |
||
Определить радиусы делительных окружностей колес
r |
= m |
Z1,2 |
. |
|
|||
1,2 |
2 |
|
|
|
|
||
Определить радиусы основных окружностей
rв1,2 = r1, 2 cos α
Подсчитать начальные радиусы колес |
|||||||||
|
|
rW 1 |
= |
|
a W |
|
|||
|
|
u + 1 |
|||||||
|
|
rW 2 |
= |
|
a W |
u |
|||
где u = |
Z 2 |
|
u |
+ 1 |
|
||||
|
|
|
|
||||||
- передаточное число передач. |
|||||||||
Z 1 |
|||||||||
|
|
|
|
|
|
|
|
||
Определить радиусы окружностей вершин колес
r |
a 1, 2 |
= r |
+ ( h * + X |
1, 2 |
− y ) m |
|
1, 2 |
a |
|
Определить радиусы окружностей впадин колес
r f 1, 2 = r1, 2 − ( ha* + C * − X 1, 2 ) m
Найти высоту зубьев колес
h = m ( 2 h a* + C * − y )
Определить толщину зубьев на окружности вершин
7
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
|
|
|
π |
+ X |
|
tgα |
|
|
|
|
|
|
|
2 |
1,2 |
|
rв1,2 |
|
|||
Sa1,2 |
= 2ra1,2 |
|
|
|
|
+invα −in var c cos |
. |
|||
|
Z |
|
|
|
r |
|||||
|
|
|
|
1,2 |
|
|
|
|||
|
|
|
|
|
|
|
a1,2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
Определить коэффициент торцового перекрытия передачи
|
|
Ε = |
1 |
[Z |
(tgα |
a1 |
−tgα |
W |
)+Z |
|
(tgα |
a 2 |
−tgα |
W |
)], |
||
|
|
|
|
||||||||||||||
|
|
|
α |
2π 1 |
|
|
|
2 |
|
|
|
||||||
где |
αa1,2 |
= arccos |
rв1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ra1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Найти угол между линией центров и осью симметрии зуба
|
SW 1,2 |
|
π |
+2X1,2tgα |
|
|
ϕa1,2 = |
= |
2 |
+invα −invαW . |
|||
2r |
|
Z |
1,2 |
|||
|
W 1,2 |
|
|
|
|
|
(13)
(14)
(15)
Определить расстояние между линией центров и точкой пересечения оси симметрии зуба с окружностью
h1,2 = ra1,2 sinϕ1,2 |
(16) |
Найти угол между осями симметрии соседних зубьев
γ1,2 |
= |
360° |
(17) |
|
Z1,2 |
||||
|
|
|
Определить расстояние между линией центров и точкой пересечение оси симметрии соседнего зуба с окружностью вершин
h1,2* = ra1,2 sin(γ1,2 −ϕ1,2 ) |
(18) |
2.1. Проверка правильности расчета
Определить межцентровое расстояние через радиусы делительных окружностей и сравнить его со значением, полученным в уравнении (4)
аW=r1+r2+ym |
(19) |
Определить радиус вершин через межцентровое расстояние и сравнить |
|
со значениями, полученными в уравнении (10). |
|
ra1,2=aW-rf1,2-0.25m |
(20) |
Проверить условие отсутствия заострения зубьев. Рекомендуемое условие отсутствия заострения зубьев для зубьев шестерни и колеса, соответственно:
Sa1,2 ≥ 0,25m
8
3. ПОСТРОЕНИЕ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ ДВУХ КОЛЕС
Подсчитав все основные размеры зубчатых колес по формулам
(1)…(20), приступают к изображению элементов зубчатого зацепления. Построение выполняется на левой половине листа в масштабе
μl = |
aW |
|
= 0.001 м/мм в следующей последовательности. |
|
O O |
||||
|
|
|||
|
1 |
2 |
|
|
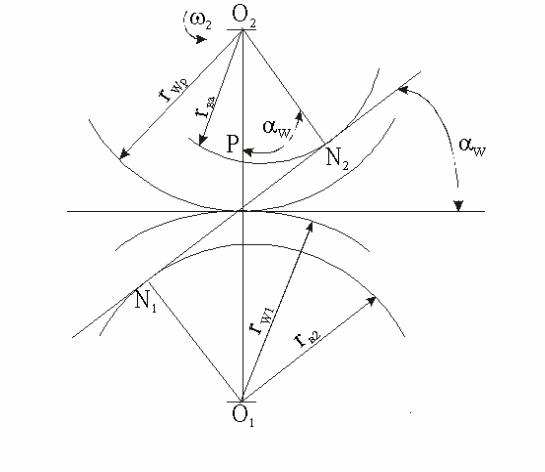
3.1.Проводят линию центров зубчатых колес, на которой откладывают в выбранном масштабе межосевое расстояние aW=O1O2 (рис. 1).
3.2.Из центров O1 и О2 проводят окружности: начальные - радиусами rW1
иrW2, касающиеся в полосе зацепления точки Р; делительные - r1 и r2, основ-
ные – rв1 и rв2, вершин - ra1 и ra2, впадин - rf1 и rf2.
Во избежание дальнейших ошибок, следует проверить расстояние между окружностями вершин одного колеса и впадин другого,
Рис. 1
9
измеренное по осевой линии, т.е. величину радиального зазора, которое должно быть равно С*m .
3.3. Провести через точку Р линию зацепления N1N2 касательную к основным окружностям в точках N1 и N2 так, что бы она была наклонена навстречу вращению ведущего колеса-шестерни. Показать угол зацепления αW с помощью линией зацепления и перпендикуляра к О1О2, проведенным через полюс зацепления Р. Прямые N 1О1 и N2O2 перпендикулярны к линии зацепления и образуют с линией центров О1О2 также угол, равный αW.
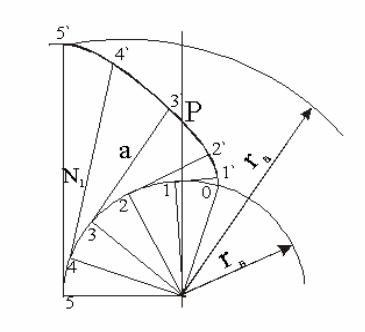
З.4. Построить эвольвенты колес касающиеся в полюсе зацепления Р и ограниченные основными окружностями - начала эвольвенты - и окружностями вершин - конца эвольвентных профилей зубьев (рис. 2).
Эвольвенту первого колеса, которую описывает точка Р прямой NР при перекатывании последней без скольжения по основной окружности, строим в следующем порядке:
Рис.2
а) отрезок N1Р делят на произвольное число равных частей "а". При этом, чем меньше выбранная длина отрезков, тем точнее она будет совпадать с длиной дуги. Рекомендуется отрезок N1Р разделить на три равные части. Обозначим точку N1 цифрой «3»;
10